1.本发明涉及车路协同的路侧智能化领域,尤其是涉及一种车路协同系统路侧感知与车端感知实时匹配方法及系统。
背景技术:
2.随着智能网联汽车产业快速发展,通过车路协同手段实现自动驾驶的技术路线逐渐获得越来越多人的认可。在单车智能技术路线已经发展到瓶颈的情况下,车路协同技术中路侧智能化设备为自动驾驶安全性可靠性提供了一层强有力的保障。具体表现在,路侧智能传感器以“上帝视角”对整个路口的交通参与者进行精确感知,其感知结果对于车辆来说既是感知系统的大范围延伸又是车辆感知系统的冗余。
3.但在车路协同感知共享的具体应用过程中,存在目标的实时匹配问题需要解决。路侧对于道路的感知结果会通过路侧通信单元rsu(roadsideunit)进行广播,在rsu广播范围内的车辆都可以接收到感知结果,车辆对于接收到的一系列路侧感知目标,并不知道哪个目标是自己,因此需要根据本车的定位结果和接收到的感知结果进行目标匹配,找到代表本车的目标,这样才能在接下来的车端感知和路端感知融合中有效利用路侧感知结果。
4.目前现有的目标匹配方法为根据本车的经纬度位置,在路侧感知结果经纬度位置列表中搜索距离本车位置最近的目标,认为该目标为路侧感知结果中的本车。
5.现有的目标实时匹配方法具有很多缺陷,包括:
6.路侧感知结果与车辆的定位结果不会完全一致,仅靠搜寻最近距离进行匹配存在很大误匹配概率;
7.车辆定位精度在不同场景下存在很大差异,卫星信号好的情况下可达到厘米级,地下或隧道等无卫星信号场景下则有可能只有米级精度,通过位置距离进行匹配无法适应所有情况;
8.仅靠位置匹配的方法,在匹配结果上不具备连续性,经常出现匹配结果的突变。
技术实现要素:
9.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种车路协同系统路侧感知与车端感知实时匹配方法。
10.本发明的目的可以通过以下技术方案来实现:
11.一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:
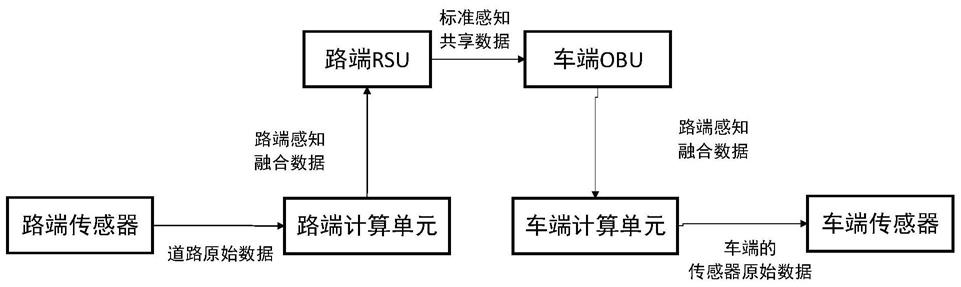
12.步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;
13.步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端rsu;
14.步骤3:路端rsu将路端感知融合数据转换为标准感知共享数据后进行广播;
15.步骤4:车端obu接收路端rsu广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;
16.步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,用以在各种不同定位精度的环境下在路端感知结果中实时准确地找到代表本车的目标。
17.所述的步骤1中,道路原始数据包括激光点云、毫米波点云以及图像信息。
18.所述的步骤3中,标准感知共享数据为符合v2x通信团体标准的数据。
19.所述的步骤4中,路端感知融合数据与路端感知结果相对应,所述的路端感知结果包括多个车辆的位置信息。
20.所述的步骤5中,车端计算单元进行实时目标匹配的过程具体为:
21.步骤501:车端计算单元同时接收车端obu传输的路端感知共享数据和车端的传感器原始数据;
22.步骤502:判断是否成功完成第一次目标匹配并得到上一时刻匹配id号,若否,则进行步骤503;
23.步骤503:从路端感知结果中搜寻与本车航向偏向在90
°
以内的车辆目标,设搜寻得到的目标集合为l1;
24.步骤504:判断目标集合为l1是否为空集,若是,则不存在匹配目标,并返回步骤501,若否,则在目标集合l1中遍历每个车辆目标,分别假设每个车辆目标为本车,根据路端感知结果和本车的感知结果分别计算各个车辆目标与本车之间的平均位置误差,设得到的平均位置误差集合为e1;
25.步骤505:获取平均位置误差集合e1中的最小值emin;
26.步骤506:判断emin是否小于本车宽度的1/2,若否,则不存在匹配目标,并返回步骤501,若是,则得到目标匹配结果,记录相应的目标id号为imin,并返回步骤501,以进行连续稳定的目标匹配。
27.所述的步骤502中,若成功完成第一次目标匹配并得到上一时刻匹配id号则进行以下步骤:
28.步骤507:从路端感知结果中搜索id号为imin的目标;
29.步骤508:判断是否存在id号为imin的目标,若是,则计算上一时刻位置和本时刻的位置之间的位置误差e,若否,则返回步骤503;
30.步骤509:判断位置误差e是否小于本车宽度的1/2,若否,则不存在匹配目标,并返回步骤501,若是,则得到目标匹配结果并记录相应的目标id号为imin,并返回步骤501,以进行连续稳定的目标匹配。
31.所述的步骤504中,本车的感知结果包括本车的自身位置和本车车端的传感器原始数据。
32.所述的步骤508中,根据航位推算算法获取本时刻的位置,所述的航位推算算法具体为根据车辆当前时刻的车辆姿态信息对车辆下一个时刻的姿态进行估计的方法,所述的车辆姿态信息包括位置、航向角、速度以及前轮转角,所述的航位推算算法的具体表达式为:
[0033][0034][0035][0036][0037]
其中,(x
i
,y
i
,θ
i
)为车辆在时刻i的位姿,(x
i 1
,y
i 1
,θ
i 1
)为车辆在时刻i 1的位姿,(x
i
,y
i
)为车辆在时刻i的位置坐标,θ
i
为车身在时刻i与x轴的夹角,(x
i 1
,y
i 1
)为车辆在时刻i 1的位置坐标,θ
i 1
为车身在时刻i 1与x轴的夹角,r为转弯半径,shift为档位,shift=
‑
1表示倒挡,shift=1表示前进挡,speed为车辆在时刻i到时刻i 1的运动过程中的速度,t为时间间隔,δs
i
为车辆在时刻i到时刻i 1行驶的距离,δθ
i
为车辆的航向角变化量,φ为车辆前轮转向角,steerangle为方向盘转角,ratio为车辆的传动比。
[0038]
所述的步骤5中,不同定位精度的环境包括地上、地下和隧道环境。
[0039]
一种车路协同系统路侧感知与车端感知实时匹配方法的系统,该系统包括:
[0040]
路端传感器:采集道路原始数据并传输至路端计算单元;
[0041]
路端计算单元:处理道路原始数据并得到路端感知融合数据;
[0042]
路端rsu:将路端感知融合数据转换为标准感知共享数据后进行广播发送;
[0043]
车端obu:接收路端rsu广播的标准感知共享数据,将标准感知共享数据转换为路端感知融合数据后传输至车端计算单元;
[0044]
车端计算单元:同时获取车端传感器的原始数据和路端感知融合数据并进行实时目标匹配。
[0045]
与现有技术相比,本发明具有以下优点:
[0046]
一、在车路协同技术应用中,能够在路侧感知结果中实时准确找到代表本车的目标;
[0047]
二、能够在各种不同定位精度的环境下,包括地上、地下及隧道等环境,实时进行准确的目标匹配;
[0048]
三、能够进行连续稳定的目标匹配,不会出现匹配结果的突变现象。
附图说明
[0049]
图1为本发明的系统结构及数据流向图。
[0050]
图2为本发明的方法流程图。
[0051]
图3为本发明的航位推算示意图。
具体实施方式
[0052]
下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0053]
实施例
[0054]
如图1所示,路端传感器采集道路原始数据,道路原始数据包括激光点云、毫米波点云以及图像信,路端计算单元接收道路原始数据并处理得到路端感知融合数据,路端感知融合数据通过路端rsu得到标准感知共享数据,并在一定范围内广播发送;车端obu接收到路端rsu广播的标准感知共享数据后,并将其转换为路端感知融合数据传输至车端计算单元,车端计算单元同时接收车端传感器的原始数据并进行实时的目标匹配。
[0055]
如图2所示,本发明提供了一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:
[0056]
步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;
[0057]
步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端rsu;
[0058]
步骤3:路端rsu将路端感知融合数据转换为标准感知共享数据后进行广播;
[0059]
步骤4:车端obu接收路端rsu广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;
[0060]
步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,用以在各种不同定位精度的环境下在路端感知结果中实时准确找到代表本车的目标。
[0061]
在步骤5中,车端计算单元进行实时目标匹配的过程具体为:
[0062]
步骤501:车端计算单元同时接收车端obu传输的路端感知共享数据和车端的传感器原始数据;
[0063]
步骤502:判断是否成功完成第一次目标匹配并得到上一时刻匹配id号,若否,则进行步骤503;
[0064]
步骤503:从路端感知结果中搜寻与本车航向偏向在90
°
以内的车辆目标,设搜寻得到的目标集合为l1;
[0065]
步骤504:判断目标集合为l1是否为空集,若是,则不存在匹配目标,进行步骤507,若否,则在目标集合l1中遍历每个车辆目标,分别假设每个车辆目标为本车,根据路端感知结果和本车的感知结果分别计算各个车辆目标和本车的平均位置误差,设得到的平均位置误差集合为e1;
[0066]
步骤505:获取位置误差集合e1中的最小值emin;
[0067]
步骤506:判断emin是否小于本车宽度的1/2,若否,则不存在匹配目标,并返回步骤501,若是,则得到目标匹配结果,并记录相应的目标id号为imin,并返回步骤501,以进行连续稳定的目标匹配。
[0068]
若成功完成第一次目标匹配并得到上一时刻匹配id号则进行以下步骤:
[0069]
步骤507:从路端感知结果中搜索id号为imin的目标;
[0070]
步骤508:判断是否存在id号为imin的目标,若是,则计算上一时刻位置和本时刻
的位置之间的位置误差e,若否,则返回步骤503;
[0071]
步骤509:判断位置误差e是否小于本车宽度的1/2,若否,则不存在匹配目标,并返回步骤501,若是,则得到目标匹配结果并记录相应的目标id号为imin,并返回步骤501,以进行连续稳定的目标匹配。
[0072]
航位推算算法是根据车辆当前时刻的车辆姿态信息,包括位置、航向角、速度以及前轮转角,来对车辆下一个时刻的姿态进行估计的方法,该方法的过程具体为:
[0073]
在时刻i,设车辆的位置坐标为(x
i
,y
i
),车身与x轴夹角为θ
i
,转弯半径为r,档位为shift(
‑
1表示倒挡,1表示前进挡),设车辆在时刻i到时刻i 1的运动过程中,速度为speed,时间间隔为t,走过的距离为δs
i
,车辆的航向角变化量为δθ
i
,那么时刻i时车辆的位姿(x
i
,y
i
,θ
i
)与时刻i 1时的位姿(x
i 1
,y
i 1
,θ
i 1
)之间的关系表达式为:
[0074][0075][0076]
由于车辆在泊车过程中处于低速运动状态,根据阿克曼模型得到转弯半径r,阿克曼模型的具体公式为:
[0077][0078][0079]
其中,φ是车辆前轮转向角,steerangle为方向盘转角,ratio为车辆的传动比。
[0080]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。