1.本发明专利涉及矫正仪的技术领域,具体而言,涉及智能背部矫正仪。
背景技术:
2.驼背是一种较为常见的脊柱变形,是胸椎后突所引起的形态改变,多见于年老脊椎变形、坐立姿势不正或佝偻病,强直性脊柱炎等疾病。
3.目前,对于大多数人来说,特别是学生以及儿童等,由于坐姿不正确,脊柱处于不正确弯曲状态,包括颈椎以及腰椎,长期以往,很容易导致脊柱变形,从而出现驼背的现象。
4.现有技术中,通常通过在绑带或者脖套等物理器械来矫正坐姿,以确保坐姿正确,避免出现驼背的问题,但是,物理器械等并不能准确的判断坐姿是否正确,且随着使用时间的推移,物理器械容易变形,更加不能起到防止驼背的效果。
技术实现要素:
5.本发明的目的在于提供一种能较为准确提醒以及判断坐姿的智能驼背矫正仪。
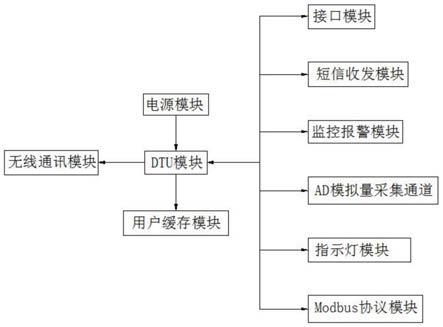
6.本发明是这样实现的,智能背部矫正仪,包括贴附在背部的机体以及壳体,所述壳体内设有放置机体的容腔,所述容腔内设有粘接片,所述机体的背面具有供所述粘接片贴附的贴附区域;所述机体内设有电路板、陀螺仪以及物理动作件,所述电路板具有与外部的移动终端通讯的无线通讯元件,移动终端通过与所述控制板通讯,控制所述智能背部矫正仪的工作状态;当所述陀螺仪监测的角运动数据超过设定值时,所述控制板启动所述物理动作件输出作用在用户背部的物理动作。
7.进一步的,所述物理动作件为震动器,当所述陀螺仪监测的角运动数据超过设定值时,所述控制板启动所述震动器震动。
8.进一步的,所述物理动作件为脉冲器,当所述陀螺仪监测的角运动数据超过设定值时,所述控制板启动所述脉冲器发出冲击脉冲。
9.进一步的,所述壳体上形成有连通所述容腔的外接口,所述机体上设有充电口,当所述机体置于容腔中后,所述充电口与外接口正对连通。
10.进一步的,所述壳体包括底壳以及相对底壳上下摆动的上壳,所述上壳的侧边与底壳的侧边铰接,所述上壳与底壳之间围合形成所述容腔。
11.进一步的,所述容腔内设有底架,所述底架设置在底壳上,所述底架与底壳之间具有容纳粘接片的底层空间,所述底架上设有放置机体的下凹位。
12.进一步的,所述底架包括架板,所述架板上形成所述下凹位,所述架板的底部朝下延伸有底撑柱,所述底撑柱通过磁吸连接在底壳上,所述架板与底壳之间形成所述底层空间。
13.进一步的,所述上壳具有朝向底壳的内表面,所述上壳的内表面上连接有定位板,所述定位板中设有定位孔,当所述上壳盖在所述底壳上后,所述机体的上部穿设在所述定位孔中。
14.进一步的,所述定位孔的侧壁朝向所述上壳的内表面延伸,形成定位环片,所述定位环片抵接在所述机体的外周。
15.进一步的,所述壳体的容腔内设有酒精棉。
16.与现有技术相比,本发明提供的智能背部矫正仪,机体贴附在背部上,当用户的坐姿不正确时,例如歪斜或者弯曲时,陀螺仪会发生角运动,当角运动超过设定值时,物理动作件则会做出物理动作,提醒用户坐姿不正确,直至用户调整坐姿为止,可以准确提醒以及判断坐姿,起到防止坐姿不正确导致驼背的问题,并且,角运动数据以及物理动作件的数据会传送至移动终端进行数据统计。
附图说明
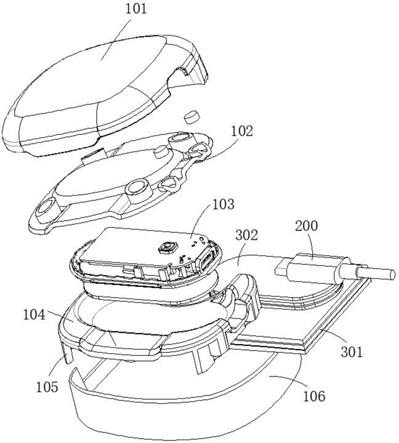
17.图1是本发明提供的智能背部矫正仪的立体爆炸示意图;
18.图2是本发明提供的智能背部矫正仪的局部立体示意图。
具体实施方式
19.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.以下结合具体实施例对本发明的实现进行详细的描述。
21.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
22.参照图1
‑
2所示,为本发明提供的较佳实施例。
23.智能背部矫正仪,包括贴附在背部的机体103以及壳体,壳体内设有放置机体103的容腔,容腔内设有粘接片302,机体103的背面具有供粘接片302贴附的贴附区域;当需要使用机体103时,将机体103从壳体的容腔内取出,将粘接片302贴附在机体103的贴附区域上,再将粘接片302贴附在用户的背部上,当不需要使用机体103时,将机体103从背部取下,将机体103上的粘接片302取下,当然,也可以将粘接片302继续贴附在机体103上,将机体103收纳在壳体的容腔中。
24.机体103内设有电路板、陀螺仪以及物理动作件,电路板作为控制中心,其控制整个机体103的运作。电路板具有与外部的移动终端通讯的无线通讯元件,移动终端通过与控制板通讯,控制智能背部矫正仪的工作状态,这样,可以通过移动终端中的app等设定机体103的参数或者控制机体103的工作状态;当陀螺仪监测的角运动数据超过设定值时,控制板启动物理动作件输出作用在用户背部的物理动作。
25.上述提供的智能背部矫正仪,机体103贴附在背部上,当用户的坐姿不正确时,例如歪斜或者弯曲时,陀螺仪会发生角运动,当角运动超过设定值时,物理动作件则会做出物理动作,提醒用户坐姿不正确,直至用户调整坐姿为止,可以准确提醒以及判断坐姿,起到
防止坐姿不正确导致驼背的问题,并且,角运动数据以及物理动作件的数据会传送至移动终端进行数据统计。
26.物理动作件为震动器,当陀螺仪监测的角运动数据超过设定值时,控制板启动震动器震动,此处的设定值可以是腰部的弯曲角度或者其它等等。
27.物理动作件为脉冲器,当陀螺仪监测的角运动数据超过设定值时,控制板启动脉冲器发出冲击脉冲。
28.上述采用振动或冲击脉冲作用在用户的背部,以提醒用户,当然,也可以是其他的物理动作,例如捶打等等,具体可视实际需要而定。
29.在震动器中,设置有马达,马达连接有偏心轮,通过马达驱动偏心轮的转动实现振动的功能。
30.壳体上形成有连通容腔的外接口107,机体103上设有充电口,当机体103置于容腔中后,充电口与外接口107正对连通。这样,当机体103收纳在壳体中后,则可以通过数据线200穿过外接口107,插设在充电口中,实现对机体103的充电,在充电的过程中,机体103收纳在壳体内,不会影响用户的使用,且安全。
31.壳体包括底壳106以及相对底壳106上下摆动的上壳101,上壳101的侧边与底壳106的侧边铰接,这样,当上壳101相对于底壳106朝上摆动后,壳体的容腔则处于打开状态,便于在容腔中放置机体103,或将机体103从壳体的容腔中取出。当上壳101相对于底壳106朝下摆动后,上壳101盖在底壳106上,此时的上壳101与底壳106之间围合形成容腔,容腔处于封闭状态。
32.容腔内设有底架104,底架104设置在底壳106上,底架104与底壳106之间具有容纳粘接片302的底层空间,底架104上设有放置机体103的下凹位。通过设置下凹位,便于机体103在容腔中的定位,通过设置底层空间,便于收纳粘接片302。
33.壳体的容腔内设有酒精棉301,酒精棉301可以收纳在底层空间中,当需要使用机体103时,利用酒精棉301对机体103进行消毒,或者,酒精棉301也可以收纳在底层空间的其他位置,具体可视实际情况而定。
34.底架104包括架板,架板上形成下凹位,架板的底部朝下延伸有底撑柱105,底撑柱105通过磁吸连接在底壳106上,架板与底壳106之间形成底层空间。通过磁吸方式,便于底架104的装配布置。
35.上壳101具有朝向底壳106的内表面,上壳101的内表面上连接有定位板102,定位板102中设有定位孔,当上壳101盖在所述底壳106上后,机体103的上部穿设在定位孔中。这样,当机体103置于壳体的容腔中后,在下凹位以及定位孔的限制下,机体103可以稳固置于壳体的容腔中,避免由于晃动,机体103在壳体的容腔中出现错位移动的现象。
36.定位孔的侧壁朝向上壳101的内表面延伸,形成定位环片,定位环片抵接在机体103的外周。通过定位环片包围在机体103的外周,且抵接着机体103的外周,对机体103起到限位定位的效果,定位环片增大了定位板102对机体103的抵接面积,从而加强定位板102的定位作用。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。