1.本发明涉及带有旋转角度检测器的电动机、旋转角度检测器及旋转角 度检测方法。
背景技术:
2.以往,为了不使用位置检测传感器而检测电动机的旋转角度,已知基 于包含于在电动机中流动的电流中的波动分量而取得电动机的旋转量的装 置。该装置生成与波动分量具有相同频率的脉冲信号,将该脉冲信号的数 量计数而取得电动机的旋转量。因此,在电动机以一定的旋转角速度旋转 的情况下能够以某种程度的精度取得旋转量。但是,在将电源关闭后的惯 性旋转过程中等波动分量变小的情况下,不能高精度地取得该旋转量。
3.相对于此,在下述专利文献1中,公开了以下的技术:在旋转角度为 规定的角度范围内且最初生成了第1脉冲信号的情况下,将旋转角度修正 为规定的角度范围内的第1角度,即使旋转角度是规定的角度范围内,通 过将在规定的角度范围内在第2个以后生成的第1脉冲信号无视,也能够 以更高的可靠性得到关于直流换向器电动机的旋转的信息。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2018/199104号
技术实现要素:
7.发明要解决的技术问题
8.但是,专利文献1所公开的技术由于基于第1脉冲信号的发生定时来 生成第2脉冲信号,所以难以使进行第1脉冲信号的修正的、规定的角度 范围内的处理简略化。
9.用来解决技术问题的手段
10.一实施方式的带有旋转角度检测器的电动机具备:电动机;以及旋转 角度检测器,检测电动机的旋转角度;电动机具有包括多个换向器片的换 向器;旋转角度检测器包括:旋转角度计算部,基于电动机的端子间电压 和流过电动机的电流,计算旋转角度,并输出旋转角度信号;第1脉冲信 号生成部,基于流过电动机的电流中包含的波动分量,生成第1脉冲信号; 运算部,基于第1脉冲信号和旋转角度信号这两者的信号,将旋转角度修 正;以及旋转信息计算部,基于运算部的输出,计算关于电动机的旋转的 信息;运算部在旋转角度为规定的角度范围内且最初生成了第1脉冲信号 的情况下,对旋转角度计算部输出将旋转角度修正为规定的角度范围内的 第1角度的指令,将旋转角度是规定的角度范围内但是在规定的角度范围 内第2个以后生成的第1脉冲信号无视,当旋转角度为规定的角度范围外 时,生成表示电动机旋转了规定角度的第2脉冲信号。
11.发明效果
12.根据一技术方案,能够使进行第1脉冲信号的修正的规定的角度范围 内的处理简
略化。
附图说明
13.图1是表示一实施方式的旋转角度检测器的结构例的概略图。
14.图2是一实施方式的电动机具备的换向器的概略图。
15.图3是表示一实施方式的旋转角度检测器的生成第1脉冲信号的定时 的一例的图。
16.图4是表示由一实施方式的旋转角度检测器进行的处理的次序(第1 例)的流程图。
17.图5是表示由一实施方式的旋转角度检测器进行的第2脉冲信号的生 成例(第1例)的图。
18.图6是表示由一实施方式的旋转角度检测器进行的处理的次序(第2 例)的流程图。
19.图7是表示由一实施方式的旋转角度检测器进行的第2脉冲信号的生 成例(第2例)的图。
具体实施方式
20.以下,参照附图对一实施方式的旋转角度检测器100进行说明。图1 是表示一实施方式的旋转角度检测器100的结构例的概略图。
21.旋转角度检测器100是检测电动机10的旋转角度的装置。在图1的例 子中,旋转角度检测器100基于电动机10的端子间电压v和流过电动机 10的电流im来检测电动机10的旋转角度。
22.电动机10是具备换向器的直流换向器电动机。电动机10例如在汽车 的车窗的升降、侧后视镜的角度的调整、空调装置的送风量的调整、车头 灯的光轴的调整等中使用。
23.图2是一实施方式的电动机10具备的换向器20的概略图。如图2所 示,换向器20由被狭缝20s相互隔开的8个换向器片20a构成。各换向器 片20a的圆弧的中心角即狭缝间角度(第2角度θc)是约45度。
24.电动机10经由4个开关sw1~sw4与电源连接。并且,电动机10构 成为,当开关sw1和开关sw3为闭状态时绕顺时针正向旋转,当开关sw2 和开关sw4为闭状态时绕逆时针反向旋转。在与电源连接的图1的例子中, 流过正向旋转的电动机10的电流具有正值,流过反向旋转的电动机10的 电流具有负值。在惯性旋转中,开关sw2和开关sw3为闭状态,流过正 向旋转的电动机10的电流具有负值,流过反向旋转的电动机10的电流具 有正值。在本实施方式中,为了在惯性旋转中也检测旋转,电动机10和电 流检测部10b存在于闭循环(loop)中。另外,在本实施方式中,电动机 10由于电阻值充分大,所以即使将电动机10的2个端子短路,也以惯性旋 转。另一方面,电动机10在电阻值较小的情况下,如果将电动机10的2 个端子短路,则迅速地减速。为了抑制惯性旋转中的电动机10的减速,只 要形成经过电阻器的闭循环就可以。
25.电压检测部10a检测电动机10的端子间电压v。电流检测部10b检测 流过电动机10的电流im。
26.旋转角度检测器100主要包括电压滤波器部30、旋转角速度计算部31、 旋转角度计算部32、电流滤波器部33、第1脉冲信号生成部34、第2脉冲 信号生成部35、旋转信息计算部36等要素。各要素既可以由电路构成,也 可以由软件构成。
27.电压滤波器部30使电压检测部10a输出的端子间电压v的波形变得平 滑。电压滤波器部30例如使端子间电压v的波形变得平滑,以便旋转角速 度计算部31能够精度良好地计算电动机10的旋转角速度。在图1的例子 中,电压滤波器部30是低通滤波器,输出将电压检测部10a所输出的端子 间电压v的波形中的高频成分作为噪声除去后的端子间电压v'。
28.旋转角速度计算部31基于电动机10的端子间电压v'和流过电动机10 的电流im,计算电动机10的旋转角速度。在图1的例子中,旋转角速度 计算部31基于式(1)计算旋转角速度ω。
29.[数式1]
[0030][0031]
ke是反电动势常数,rm是电动机10的内部电阻,lm是电动机10 的电感,dim/dt是电流im的一次微分。电流im的一次微分例如是前次的 电流im的值与此次的电流im的值的差。
[0032]
旋转角速度计算部31按照一定的控制周期计算电动机10的旋转角速 度ω,将计算出的旋转角速度ω对旋转角度计算部32输出。
[0033]
旋转角度计算部32计算电动机10的旋转角度。旋转角度计算部32基 于式(2)计算旋转角度θ。
[0034]
[数式2]
[0035]
θ=∫0ω
×
dt
…
(2)
[0036]
旋转角度计算部32例如将旋转角速度计算部31按照一定的控制周期 输出的旋转角速度ω进行累计而计算旋转角度θ,将关于计算出的旋转角 度θ的信号即旋转角度信号对第2脉冲信号生成部35输出。
[0037]
此外,旋转角度计算部32根据来自第2脉冲信号生成部35的同步指 令,将旋转角度θ复位为零。
[0038]
电流滤波器部33输出在电流检测部10b输出的电流im中包含的特定 的频率成分即波动分量ir。电流滤波器部33由使波动分量ir的频率通过的 带通滤波器构成,以便第1脉冲信号生成部34能够检测电流im的波动分 量ir。由带通滤波器构成的电流滤波器部33将电流检测部10b输出的电流im的波形中的波动分量ir以外的频率成分除去。在本实施例中利用的波动 分量ir起因于换向器片20a与电刷的接触/分离而生成。因此,在波动分量 ir的1周期的期间,电动机10旋转的角度等于狭缝间角度。
[0039]
第1脉冲信号生成部34生成根据波动分量ir的波形而推断电动机10 旋转了一定的角度的量的信号。该信号是与波动分量ir的周期对应的信号。 一定的角度既可以是与波动分量ir的1周期对应的角度,也可以是与半周 期对应的角度。在该实施例中,每当电动机10旋转了狭缝间角度(第2角 度θc)的量,就生成根据波动分量ir的波形推断的信号(第1脉冲信号pa)。 第1脉冲信号生成部34基于电流滤波器部33输出的波动分量ir的波形, 生成
第1脉冲信号pa。
[0040]
第2脉冲信号生成部35是“运算部”的一例。第2脉冲信号生成部35 基于旋转角度计算部32所输出的旋转角度信号,生成表示电动机10旋转 了狭缝间角度的量的第2脉冲信号pb。具体而言,第2脉冲信号生成部35 当电动机10的旋转角度θ达到了狭缝间角度的范围外的规定的角度(第5 角度θf)时,生成第2脉冲信号pb。即,第2脉冲信号生成部35不论第1 脉冲信号pa如何,每当旋转角度θ达到规定的角度(第5角度θf)就生成 第2脉冲信号pb。第2脉冲信号生成部35将所生成的第2脉冲信号pb向 旋转信息计算部36输出。
[0041]
此外,第2脉冲信号生成部35将表示电动机10的旋转方向的方向信 号向旋转信息计算部36输出。例如,第2脉冲信号生成部35如果旋转方 向是正向旋转方向,则作为旋转角度θ而输出正值,如果旋转方向是反向 旋转方向,则作为旋转角度θ而输出负值。旋转角度θ当流过电动机10的 电流为正值时具有正值,当流过电动机10的电流为负值时具有负值。但是, 在惯性旋转中,旋转角度θ当流过电动机10的电流为负值时具有正值,当 流过电动机10的电流为正值时具有负值。
[0042]
此外,第2脉冲信号生成部35能够基于第1脉冲信号pa的发生定时 将旋转角度θ修正。例如,第2脉冲信号生成部35在发生了第1脉冲信号 pa时的旋转角度θ为第3角度θu以上且小于第1角度θp的情况下,能够 将旋转角度θ修正为第1角度θp。此外,例如第2脉冲信号生成部35在发 生了第1脉冲信号pa时的旋转角度θ为第1角度θp以上且小于第4角度θd 的情况下,能够将旋转角度θ修正为第1角度θp。另外,第2脉冲信号生 成部35通过向旋转角度计算部32输出将旋转角度θ修正为第1角度θp的 指令,能够将旋转角度θ修正为第1角度θp。
[0043]
旋转信息计算部36计算电动机10的旋转信息。电动机10的旋转信息 例如包括从基准旋转位置起的旋转量(旋转角度)、从基准旋转位置起的转 速等。在将电动机10用于汽车的车窗的升降的情况下,电动机10的旋转 信息也可以是被变换为车窗的上缘相对于基准位置的相对位置、车窗的打 开量等的值。此外,也可以包括某个期间中的旋转角速度ω的平均值、最 大值、最小值、中间值等的统计值。在本实施方式中,旋转信息计算部36 基于从第2脉冲信号生成部35输出的第2脉冲信号pb,计算电动机10的 旋转信息。具体而言,旋转信息计算部36通过对在电动机10的旋转开始 后生成的第2脉冲信号pb的数量乘以第2角度θc,计算电动机10的旋转 开始后的旋转量。此时,旋转信息计算部36基于第2脉冲信号生成部35 与第2脉冲信号pb一起输出的方向信号,决定是将第2脉冲信号pb的数 量增加还是减小。
[0044]
图3是表示一实施方式的旋转角度检测器100的生成第1脉冲信号pa 的定时的一例的图。第1脉冲信号生成部34按照波动分量ir的每1周期, 生成第1脉冲信号pa。例如,第1脉冲信号生成部34每当波动分量ir超 过基准电流值ib就生成第1脉冲信号pa。在图3的例子中,第1脉冲信号 生成部34在时刻t1、t2、t3、
…
、tn等生成第1脉冲信号pa。t1、t2、 t3、
…
、tn等表示波动分量ir的周期,θ1、θ2、θ3、
…
、θn等表示第1 脉冲信号生成部34生成了第1脉冲信号时的旋转角度θ。旋转角度θ是旋 转角度计算部32计算出的值。这样,第1脉冲信号生成部34典型的是每 当旋转角度θ增加狭缝间角度就生成第1脉冲信号pa。
[0045]
但是,第1脉冲信号生成部34例如在电动机10的电源关闭后的惯性 旋转期间中电流im及其波动分量ir变小的情况下,有不能检测到波动分 量ir而不能生成第1脉冲信号pa的情况。此外,第1脉冲信号生成部34 例如在电动机10的电源刚开启后发生了突入电流的
情况下,有根据其突入 电流而误生成第1脉冲信号pa的情况。这样的第1脉冲信号pa的生成遗 漏或误生成会使旋转角度检测器100输出的关于电动机10的旋转的信息(以下设为“旋转信息”)的可靠性下降。
[0046]
所以,一实施方式的旋转角度检测器100不论第1脉冲信号生成部34 产生的第1脉冲信号pa如何,都通过由第2脉冲信号生成部35生成第2 脉冲信号pb,从而能够更高精度地生成表示电动机10的旋转角度的信号。
[0047]
(由旋转角度检测器100进行的处理的第1例)
[0048]
图4是表示由一实施方式的旋转角度检测器100进行的处理的次序(第 1例)的流程图。旋转角度检测器100在电动机10的驱动过程中执行图4 所示的一系列的处理。
[0049]
首先,旋转角速度计算部31取得端子间电压v'及电流im(步骤s401)。 旋转角速度计算部31按照规定的每个控制周期取得电压滤波器部30所输 出的端子间电压v'和电流检测部10b所输出的电流im。
[0050]
接着,旋转角速度计算部31及旋转角度计算部32计算旋转角速度ω 及旋转角度θ(步骤s402)。具体而言,旋转角速度计算部31通过将端子 间电压v'和电流im代入到式(1)中,从而按照规定的每个控制周期计算 旋转角速度ω。旋转角度计算部32通过将每个控制周期计算出的旋转角速 度ω累计,从而计算旋转角度θ。
[0051]
接着,旋转角度检测器100判定是否旋转角度θ小于第3角度θu(步 骤s403)。
[0052]
在步骤s403中判定为旋转角度θ小于第3角度θu的情况下(步骤 s403:是),旋转角度检测器100将处理向步骤s416推进。
[0053]
另一方面,在步骤s403中判定为旋转角度θ不小于第3角度θu的情 况下(步骤s403:否),旋转角度检测器100判定旋转角度θ是否小于第1 角度θp(步骤s404)。
[0054]
在步骤s404中判定为旋转角度θ小于第1角度θp的情况下(步骤s404: 是),旋转角度检测器100判定是否发生了第1脉冲信号pa(步骤s405)。 并且,在步骤s405中判断为发生了第1脉冲信号pa的情况下(步骤s405: 是),第2脉冲信号生成部35将旋转角度θ修正为第1角度θp,在标志r 中代入“true”(步骤s406)。标志r表示是否进行了旋转角度θ的修正。 然后,旋转角度检测器100将处理向步骤s416推进。另一方面,在步骤 s405中在判定为没有发生第1脉冲信号pa的情况下(步骤s405:否),旋 转角度检测器100将处理向步骤s416推进。
[0055]
另一方面,在步骤s404中在判断为旋转角度θ不小于第1角度θp的 情况下(步骤s404:否),旋转角度检测器100判定旋转角度θ是否小于 第4角度θd(步骤s407)。
[0056]
在步骤s407中判断为旋转角度θ小于第4角度θd的情况下(步骤s407: 是),旋转角度检测器100判断标志r是否是“true”(步骤s408)。在步 骤s408中判断为标志r是“true”的情况下(步骤s408:是),旋转角度 检测器100将处理向步骤s416推进。另一方面,在步骤s408中判断为标 志r不是“true”的情况下(步骤s408:否),旋转角度检测器100判断 是否发生了第1脉冲信号pa(步骤s409)。并且,在步骤s409中判断为发 生了第1脉冲信号pa的情况下(步骤s409:是),第2脉冲信号生成部35 将旋转角度θ修正为第1角度θp,在标志r中代入“true”(步骤s410)。 然后,旋转角度检测器100将处理向步骤s416推进。另一方面,在步骤 s409中判断为没有发生第1脉冲信号pa的情况下(步骤s409:否),旋转 角度检测器100将处理向步骤s416推进。
[0057]
另一方面,在步骤s407中判断为旋转角度θ不小于第4角度θd的情 况下(步骤
s407:否),旋转角度检测器100判定旋转角度θ是否小于第5 角度θf(步骤s411)。
[0058]
在步骤s411中判断为旋转角度θ小于第5角度θf的情况下(步骤 s411:是),旋转角度检测器100将处理向步骤s416推进。
[0059]
另一方面,在步骤s411中判断为旋转角度θ不小于第5角度θf的情 况下(步骤s411:否),旋转角度检测器100判断标志g是否是“false
”ꢀ
(步骤s412)。标志g表示是否发生了第2脉冲信号pb。在步骤s412中 在判断为标志g是“false”的情况下(步骤s412:是),第2脉冲信号生 成部35生成第2脉冲信号pb,在标志g中代入“true”(步骤s413)。并 且,旋转角度检测器100将处理向步骤s414推进。在步骤s412中判断为 标志g不是“false”的情况下(步骤s412:否),旋转角度检测器100将 处理向步骤s414推进。
[0060]
在步骤s414中,旋转角度检测器100判断旋转角度θ是否小于第2角 度θc。在步骤s414中在判断为旋转角度θ小于第2角度θc的情况下(步 骤s414:是),旋转角度检测器100将处理向步骤s416推进。另一方面, 在步骤s414中在判断为旋转角度θ不小于第2角度θc的情况下(步骤 s414:否),旋转角度检测器100将处理向步骤s415推进。第2脉冲信号 生成部35将旋转角度θ修正为0,在标志r中代入“false”,在标志g中 代入“false”(步骤s415)。然后,旋转角度检测器100将处理向步骤s416 推进。
[0061]
在步骤s416中,旋转信息计算部36计算电动机10的旋转量。例如, 旋转信息计算部36通过对在电动机10的旋转开始后生成的第2脉冲信号 pb的数量乘以第2角度θc,计算电动机10的旋转开始后的旋转量。
[0062]
然后,旋转角度检测器100判断旋转角速度ω是否是0(步骤s417)。 在步骤s417中在判断为旋转角速度ω是0的情况下(步骤s417:是),旋 转角度检测器100将图4所示的一系列的处理结束。另一方面,在步骤s417 中在判断为旋转角速度ω不是0的情况下(步骤s417:否),旋转角度检 测器100将处理向步骤s401返回。
[0063]
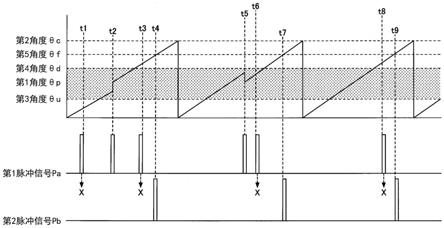
图5是表示一实施方式的旋转角度检测器100的第2脉冲信号pb的生 成例(第1例)的图。图5是表示旋转角度检测器100执行了图4所示的 一系列的处理时的第2脉冲信号pb的生成例的图。
[0064]
另外,在图5所示的例子中,“规定的角度范围”是第3角度θu以上 且小于第4角度θd。即,第3角度θu是“规定的角度范围”的开始角度, 第4角度θd是“规定的角度范围”的结束角度。此外,在图5所示的例子 中,第2角度θc等于电动机10的狭缝间角度(即,波动分量ir的1周期 的角度)。此外,在图5所示的例子中,第5角度θf是由第2脉冲信号生 成部35生成第2脉冲信号pb的角度。此外,在图5所示的例子中,第1 角度θp是由第2脉冲信号生成部35将旋转角度θ修正的角度。
[0065]
在图5所示的例子中,在时刻t1,通过第1脉冲信号生成部34发生了 第1脉冲信号pa。此时,旋转角度θ小于第3角度θu。因此,在时刻t1, 第2脉冲信号生成部35不进行旋转角度θ的修正,并且不生成第2脉冲信 号pb。
[0066]
此外,在图5所示的例子中,在时刻t2,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第3角度θu以上且小于第1 角度θp。因此,在时刻t2,第2脉冲信号生成部35将旋转角度θ修正为第 1角度θp,并且不生成第2脉冲信号pb。
[0067]
此外,在图5所示的例子中,在时刻t3、t8,由第1脉冲信号生成部 34发生了第1脉冲信号pa。此时,旋转角度θ是第4角度θd以上且小于 第5角度θf。因此,在时刻t3、t8,第2脉
冲信号生成部35不将旋转角度 θ修正,并且不生成第2脉冲信号pb。
[0068]
此外,在图5所示的例子中,在时刻t4、t7、t9,旋转角度θ达到了第 5角度θf。因此,在时刻t4、t7、t9,第2脉冲信号生成部35不将旋转角 度θ修正,并且生成第2脉冲信号pb。
[0069]
此外,在图5所示的例子中,在时刻t5,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第1角度θp以上且小于第4 角度θd。因此,在时刻t5,第2脉冲信号生成部35将旋转角度θ修正为第 1角度θp,并且不生成第2脉冲信号pb。
[0070]
此外,在图5所示的例子中,在时刻t6,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第1角度θp以上且小于第4 角度θd。但是,此时根据时刻t5时的旋转角度θ的修正,标志r是“true”。 因此,在时刻t6,第2脉冲信号生成部35不将旋转角度θ修正并且不生成 第2脉冲信号pb。
[0071]
如以上说明,一实施方式的旋转角度检测器100通过执行图4所示的 一系列的处理,不论第1脉冲信号pa的发生定时如何,都能够由第2脉冲 信号生成部35生成第2脉冲信号pb。
[0072]
因此,例如一实施方式的旋转角度检测器100即使在电动机10的电源 关闭后的惯性旋转期间中电流im及其波动分量ir变小、第1脉冲信号生 成部34不能基于波动分量ir的波形生成第1脉冲信号pa的情况下,也能 够生成第2脉冲信号pb。
[0073]
此外,例如一实施方式的旋转角度检测器100即使在电动机10的电源 刚开启后发生突入电流、且第1脉冲信号生成部34对应于该突入电流而误 生成第1脉冲信号pa的情况下,也不生成与该第1脉冲信号pa对应的第2 脉冲信号pb。即,能够将由该第1脉冲信号pa带来的影响排除。
[0074]
此外,例如一实施方式的旋转角度检测器100即使在第1脉冲信号生 成部34由于噪声等的影响而误生成了第1脉冲信号pa的情况下,也不会 生成与该第1脉冲信号pa对应的第2脉冲信号pb。
[0075]
因此,一实施方式的旋转角度检测器100通过基于第2脉冲信号pb计 算电动机10的旋转信息,能够使电动机10的旋转信息的可靠性提高。
[0076]
此外,一实施方式的旋转角度检测器100通过执行图4所示的一系列 的处理,能够由第2脉冲信号生成部35基于第1脉冲信号pa的发生定时 将旋转角度θ修正为规定角度(第1角度θp)。由此,一实施方式的旋转角 度检测器100能够抑制旋转角度θ的误差的累积,因而,不论电动机10的 转速如何,都能够将旋转角度θ的误差抑制在一定范围内。
[0077]
此外,一实施方式的旋转角度检测器100通过执行图4所示的一系列 的处理,根据标志r及标志g来判定是否进行了第1脉冲信号pa的修正 及第2脉冲信号pb的生成,所以能够防止第1脉冲信号pa的修正及第2 脉冲信号pb的生成被重复地进行。
[0078]
此外,一实施方式的旋转角度检测器100通过执行图4所示的一系列 的处理,能够在“规定的角度范围”的范围外生成第2脉冲信号pb,因此 能够使进行第1脉冲信号pa的修正的“规定的角度范围”的范围内的处理 简略化。
[0079]
(由旋转角度检测器100进行的处理的第2例)
[0080]
图6是表示由一实施方式的旋转角度检测器100进行的处理的次序(第 2例)的流程图。旋转角度检测器100在电动机10的驱动中执行图6所示 的一系列的处理。
[0081]
首先,旋转角速度计算部31取得端子间电压v'及电流im(步骤s601)。 旋转角速度
计算部31按照规定的每个控制周期取得电压滤波器部30输出 的端子间电压v'和电流检测部10b输出的电流im。
[0082]
接着,旋转角速度计算部31及旋转角度计算部32计算旋转角速度ω 及旋转角度θ(步骤s602)。具体而言,旋转角速度计算部31通过将端子 间电压v'和电流im代入到式(1)中,从而按照规定的每个控制周期计算 旋转角速度ω。旋转角度计算部32通过将按照每个控制周期计算出的旋转 角速度ω累计,从而计算旋转角度θ。
[0083]
接着,旋转角度检测器100判断旋转角度θ是否小于第2角度θc(步 骤s603)。
[0084]
在步骤s603中判断为旋转角度θ不小于第2角度θc的情况下(步骤 s603:否),第2脉冲信号生成部35将旋转角度θ初始化为0,在标志g 中代入“false”(步骤s610)。并且,旋转角度检测器100将处理向步骤 s616推进。
[0085]
另一方面,在步骤s603中在判断为旋转角度θ小于第2角度θc的情 况下(步骤s603:是),旋转角度检测器100判断是否发生了第1脉冲信 号pa(步骤s604)。在步骤s604中判断为发生了第1脉冲信号pa的情况 下(步骤s604:是),旋转角度检测器100将处理向步骤s605推进。另一 方面,在步骤s604中在判断为没有发生第1脉冲信号pa的情况下(步骤 s604:否),旋转角度检测器100将处理向步骤s611推进。
[0086]
在步骤s605中,旋转角度检测器100判断旋转角度θ是否小于第3角 度θu。
[0087]
在步骤s605中判定为旋转角度θ不小于第3角度θu的情况下(步骤 s605:否),旋转角度检测器100在标志r中代入“true”(步骤s606)。 并且,第2脉冲信号生成部35将旋转角度θ初始化为0,在标志g中代入
ꢀ“
false”(步骤s610)。然后,旋转角度检测器100将处理向步骤s616推 进。
[0088]
另一方面,在步骤s605中在判定为旋转角度θ小于第3角度θu的情 况下(步骤s605:是),旋转角度检测器100判断旋转角度θ是否小于第4 角度θd(步骤s607)。在步骤s607中在判断为旋转角度θ不小于第4角度 θd的情况下(步骤s607:否),旋转角度检测器100将处理向步骤s616推 进。另一方面,在步骤s607中在判断为旋转角度θ小于第4角度θd的情 况下(步骤s607:是),旋转角度检测器100判断标志r是否是“false
”ꢀ
(步骤s608)。
[0089]
在步骤s608中判断为标志r不是“false”的情况下(步骤s608:否), 旋转角度检测器100将处理向步骤s616推进。另一方面,在步骤s608中 判断为标志r是“false”的情况下(步骤s608:是),旋转角度检测器100 在标志r中代入“true”(步骤s609)。并且,第2脉冲信号生成部35将 旋转角度θ初始化为0,在标志g中代入“false”(步骤s610)。然后, 旋转角度检测器100将处理向步骤s616推进。
[0090]
在步骤s611中,旋转角度检测器100判定旋转角度θ是否小于第3角 度θu。
[0091]
在步骤s611中在判定为旋转角度θ不小于第3角度θu的情况下(步 骤s611:否),旋转角度检测器100将处理向步骤s616推进。
[0092]
另一方面,在步骤s611中在判定为旋转角度θ小于第3角度θu的情 况下(步骤s611:否),旋转角度检测器100判断旋转角度θ是否小于第4 角度θd(步骤s612)。
[0093]
在步骤s612中在判断为旋转角度θ小于第4角度θd的情况下(步骤 s612:是),旋转角度检测器100将处理向步骤s616推进。
[0094]
另一方面,在步骤s612中在判断为旋转角度θ不小于第4角度θd的 情况下(步骤s612:否),旋转角度检测器100判断标志g是否是“false
”ꢀ
(步骤s613)。
[0095]
在步骤s613中,在判断为标志g不是“false”的情况下(步骤s613: 否),旋转角度检测器100将处理向步骤s616推进。
[0096]
另一方面,在步骤s613中判断为标志g是“false”的情况下(步骤 s613:是),第2脉冲信号生成部35生成第2脉冲信号pb(步骤s614)。 并且,旋转角度检测器100在标志r中代入“true”,在标志g中代入
ꢀ“
true”(步骤s615)。然后,旋转角度检测器100将处理向步骤s616推 进。
[0097]
在步骤s616中,旋转信息计算部36计算电动机10的旋转量。例如, 旋转信息计算部36通过对在电动机10的旋转开始后生成的第2脉冲信号 pb的数量乘以第2角度θc,计算电动机10的旋转开始后的旋转量。
[0098]
然后,旋转角度检测器100判断旋转角速度ω是否是0(步骤s617)。 在步骤s617中在判断为旋转角速度ω是0的情况下(步骤s617:是),旋 转角度检测器100将图6所示的一系列的处理结束。另一方面,在步骤s617 中在判断为旋转角速度ω不是0的情况下(步骤s617:否),旋转角度检 测器100将处理向步骤s601返回。
[0099]
图7是表示由一实施方式的旋转角度检测器100进行的第2脉冲信号 pb的生成例(第2例)的图。图7是表示旋转角度检测器100执行了图6 所示的一系列的处理时的第2脉冲信号pb的生成例的图。
[0100]
另外,在图7所示的例子中,“规定的角度范围”是第3角度θu以上 且小于第2角度θc,第1角度θp以上且小于第4角度θd,包括0度。即, 第3角度θu是“规定的角度范围”的开始角度,第4角度θd是“规定的 角度范围”的结束角度。此外,在图7所示的例子中,第2角度θc等于电 动机10的狭缝间角度(即,波动分量ir的1周期的角度)。此外,在图7 所示的例子中,第5角度θf是由第2脉冲信号生成部35生成第2脉冲信 号pb的角度。但是,在图7所示的例子中,第5角度θf与第4角度θd相 等。此外,在图7所示的例子中,第1角度θp是由第2脉冲信号生成部35 将旋转角度θ修正的角度。但是,在图7所示的例子中,第1角度θp是0 度。
[0101]
在图7所示的例子中,在时刻t1、t3、t5、t7,旋转角度θ为第4角度 θd及第5角度θf(即,“规定的角度范围”的结束角度)。因此,在时刻 t1,第2信号生成部35生成第2脉冲信号pb。
[0102]
此外,在图7所示的例子中,在时刻t2,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第3角度θu以上且小于第2 角度θc。因此,此时的旋转角度θ是“规定的角度范围”的范围内。因此, 在时刻t2,第2脉冲信号生成部35将旋转角度θ修正为第1角度θp(0度)。
[0103]
此外,在图7所示的例子中,在时刻t4,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第1角度θp以上且小于第4 角度θd。因此,此时的旋转角度θ为“规定的角度范围”的范围内。因此, 在时刻t4,第2信号生成部35将旋转角度θ修正为第1角度θp(0度)。
[0104]
此外,在图7所示的例子中,在时刻t6,由第1脉冲信号生成部34发 生了第1脉冲信号pa。此时,旋转角度θ是第4角度θd及第5角度θf以 上且小于第3角度θu(即,“规定的角度范围”的范围外)。因此,在时刻 t6,第2脉冲信号生成部35不将旋转角度θ修正。
[0105]
如以上说明,一实施方式的旋转角度检测器100通过执行图6所示的 一系列的处理,不论第1脉冲信号pa的发生定时如何都能够由第2脉冲信 号生成部35生成第2脉冲信号
pb。
[0106]
因此,一实施方式的旋转角度检测器100通过基于第2脉冲信号pb计 算电动机10的旋转信息,能够使电动机10的旋转信息的可靠性提高。
[0107]
此外,一实施方式的旋转角度检测器100通过执行图6所示的一系列 的处理,能够由第2脉冲信号生成部35基于第1脉冲信号pa的发生定时 将旋转角度θ修正为规定角度(第1角度θp(0度))。由此,一实施方式 的旋转角度检测器100能够抑制旋转角度θ的误差的累积,因而,不论电 动机10的转速如何,都能够将旋转角度θ的误差抑制在一定范围内。
[0108]
此外,一实施方式的旋转角度检测器100通过执行图6所示的一系列 的处理,根据标志r及标志g来判定是否进行了第1脉冲信号pa的修正 及第2脉冲信号pb的生成,所以能够防止第1脉冲信号pa的修正及第2 脉冲信号pb的生成被重复地进行。
[0109]
此外,一实施方式的旋转角度检测器100通过执行图6所示的一系列 的处理,能够在“规定的角度范围”的范围外生成第2脉冲信号pb,所以 能够使进行第1脉冲信号pa的修正的“规定的角度范围”的范围内的处理 简略化。
[0110]
以上,对本发明的一实施方式详细地进行了记述,但本发明并不限定 于这些实施方式,在权利要求书所记载的本发明的主旨的范围内能够进行 各种变形或变更。
[0111]
标号说明
[0112]
10 电动机
[0113]
10a 电压检测部
[0114]
10b 电流检测部
[0115]
20 换向器
[0116]
20a 换向器片
[0117]
20s 狭缝
[0118]
30 电压滤波器部
[0119]
31 旋转角速度计算部
[0120]
32 旋转角度计算部
[0121]
33 电流滤波器部
[0122]
34 第1脉冲信号生成部
[0123]
35 第2脉冲信号生成部
[0124]
36 旋转信息计算部
[0125]
100 旋转角度检测器
[0126]
pa 第1脉冲信号
[0127]
pb 第2脉冲信号
[0128]
sw1~sw4 开关
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。