1.本发明涉及一种膝关节和髋关节助力行走且防摔的下肢恢复装置,具体涉及一种人体下肢恢复(强身)用膝关节和髋关节助力,嵌入模拟复杂地面工况和多身高、体格适应功能的下肢恢复(强身)装置。
背景技术:
2.下肢助力外骨骼以膝关节助力,和髋关节辅助助力成为未来下肢恢复的首选下肢助力恢复装置。下肢助力外骨骼以其穿戴方便,助力明显,使用可靠等特点被认为是理想的下肢恢复训练装置。
3.其中恢复训练的安全性和避免二次伤害尤为重要。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种膝关节和髋关节助力行走且防摔的下肢恢复装置,模拟不同地面工况,可满足不同人体体型,防止二次伤害,实现人体负载的下肢恢复。
5.本发明解决技术的方案是:
6.一种膝关节和髋关节助力行走且防摔的下肢恢复装置,包括模拟平台部分,左右扶柱和腰间及后背防护部分,左右大小腿角度弯曲及膝关节助力、负载部分,下肢小腿高度调节部分,下肢大腿高度调节部分,康复人体胯部宽度无极调节部分,左右髋关节助力、负载及防摔部分,
7.模拟平台部分模拟平整路面、阶梯路面和斜坡路面;
8.左右扶柱、腰间及后背防护部分,包括下肢右髋关节转轴可调防护固定杠、下肢右髋关节上移扶柱、扶柱调节螺母及锁紧装置、下肢扶柱下端调节柱、下肢左髋关节转轴可调防护固定杠、下肢左髋关节上移扶柱和腰间及后背防护固定杠,用于实现康复人员腰间和后背的防护作用;
9.左右大小腿角度弯曲及膝关节助力、负载部分,包括左大腿齿形调节下端、左膝关节助力负载电机、左侧膝关节控制器、左小腿调节上端、左右下肢上限位接触块、左右下肢下限位接触快、左大腿束带、左小腿调节下端、左腿连接脚、左小腿束带、和右大腿束带、右侧膝关节控制器、右小腿调节上端、右膝关节助力负载电机、右大腿齿形调节下端、左右下肢上限位接触块、左右下肢下限位接触快、右小腿束带、右小腿调节下端、右腿连接脚,当右侧膝关节控制器、左侧膝关节控制器控制左膝关节助力负载电机和右膝关节助力负载电机任意起始位置助力行走或体能恢复负载时,左小腿调节上端、右小腿调节上端发生转动,左右下肢上限位接触块、左右下肢下限位接触快始终保持大腿和小腿弯曲角度为5
°‑
100
°
的机械限位,此时膝关节电机也可实现任意角度程序限位,采用两种限位的形式,实现了避免在人体恢复理疗时误操作或其它原因过度弯曲引起二次伤害;
10.下肢小腿高度调节部分,包括左小腿调节上端、左小腿调节下端和右小腿调节下
端、右小腿调节上端;
11.下肢大腿高度调节部分,包括左大腿齿形调节上端、左大腿齿形调节下端和右大腿齿形调节下端、右大腿齿形调节上端,
12.康复人体胯部宽度无极调节部分,包括人体宽度调节电机、左胯部连接、左旋涡轮、左旋蜗杆、右旋蜗杆、右旋涡轮,右胯部连接、人体胯部宽度调节电机控制器ⅰ、人体胯部宽度调节电机控制器ⅱ,人体胯部宽度调节电机与左旋涡轮、右旋涡轮连接,左旋涡轮、右旋涡轮与左旋蜗杆、右旋蜗杆连接,左旋蜗杆、右旋蜗杆固定在左胯部连接、右胯部连接,当人体胯部宽度调节电机控制器ⅰ、人体胯部宽度调节电机控制器ⅱ控制人体宽度调节电机转动时,带动左旋涡轮、右旋涡轮转动,此时左旋蜗杆、右旋蜗杆左右移动,并带动左胯部连接、右胯部连接实现宽度调节,自调节为感知自动调节,康复人体宽度无极可调;
13.左右髋关节助力、负载及防摔部分,包括下肢右髋关节转轴可调防护固定杠、右侧髋关节控制器、右大腿齿形调节上端、右嵌入电机组件和下肢左髋关节转轴可调防护固定杠、左大腿齿形调节上端、左嵌入电机组件、左侧髋关节控制器。
14.进一步的,下肢右髋关节上移扶柱和下肢扶柱下端调节柱通过扶柱调节螺母及锁紧装置连接并固定在模拟平台上,通过调节扶柱调节螺母及锁紧装置和下肢扶柱下端调节柱的位置可实现上下即高度的调节和左右即宽度的调节。
15.进一步的,下肢左髋关节上移扶柱和下肢扶柱下端调节柱通过扶柱调节螺母及锁紧装置连接并固定在模拟平台上,通过调节扶柱调节螺母及锁紧装置和下肢扶柱下端调节柱的位置可实现上下即高度的调节和左右即宽度的调节。
16.进一步的,左膝关节助力负载电机固定在左大腿齿形调节下端,左小腿调节上端固定在左膝关节助力负载电机转子部位,左右下肢上限位接触块和左大腿齿形调节下端为一体设计,左右下肢下限位接触快和左小腿调节上端为一体设计,左大腿束带固定在左大腿齿形调节下端,左小腿束带固定在左小腿调节下端。
17.进一步的,右膝关节助力负载电机固定在右大腿齿形调节下端,右小腿调节上端固定在右膝关节助力负载电机转子部位,右小腿调节上端左右下肢上限位接触块和右大腿齿形调节下端为一体设计,左右下肢下限位接触快和右小腿调节上端为一体设计,右大腿束带固定在右大腿齿形调节下端,右小腿束带固定在右小腿调节下端。
18.进一步的,左小腿调节下端插入左小腿调节上端,通过锁紧左小腿调节上端的螺钉实现左下肢小腿长度的无极调节。
19.进一步的,右小腿调节下端插入右小腿调节上端,通过锁紧右小腿调节上端的螺钉实现由下肢小腿长度的无极调节。
20.进一步的,左大腿齿形调节下端用螺钉安装在左大腿齿形调节上端,通过左大腿齿形调节上端、左大腿齿形调节下端间的齿形有级定位和螺钉锁紧实现左下肢大腿高度有级调节。
21.进一步的,右大腿齿形调节下端用螺钉安装在右大腿齿形调节上端,通过右大腿齿形调节下端、右大腿齿形调节上端间的齿形有级定位和螺钉锁紧实现右下肢大腿高度有级调节。
22.进一步的,髋关节到膝关节有级长度可调、膝关节到脚面无极可调。
23.进一步的,右嵌入电机组件安装在下肢右髋关节转轴可调防护固定杠,右大腿齿
形调节上端与右嵌入电机组件固定,右侧髋关节控制器固定在右大腿齿形调节上端端面,此时右髋关节助力、负载及防摔部分的右嵌入电机组件转动带动右大腿齿形调节上端,则右大腿齿形调节上端随动助力、随动负载大腿,右嵌入电机组件仍超速抱紧电机,超速抱紧电机判别何时抱紧的条件是膝关节和髋关节均匀助力,当突然有转速或扭矩超过髋关节助力的转速和扭矩时,电机抱紧,以实现下肢恢复时的随动助力和误摔防护。
24.进一步的,左嵌入电机组件安装在下肢左髋关节转轴可调防护固定杠,左大腿齿形调节上端与左嵌入电机组件固定,即左大腿齿形调节上端通过螺钉固定在左嵌入电机组件的转子上,左侧髋关节控制器固定在左大腿齿形调节上端端面,此时左髋关节助力、负载及防摔部分的左嵌入电机组件转动带动左大腿齿形调节上端,左大腿齿形调节上端有随动助力、随动负载大腿,左嵌入电机组件还是超速抱紧电机,超速抱紧电机判别何时抱紧抱紧的条件是膝关节和髋关节均匀助力,当突然有转速或扭矩超过髋关节助力的转速和扭矩时,电机抱紧,以实现下肢恢复时的随动助力和误摔防护。
25.本发明与现有技术相比的有益效果是:
26.(1)本发明的真实复杂道路工况(如:平路、坡路、台阶等)装置,再加上防摔设计和保护功能,实现了人体下肢恢复时更真实的待恢复弱点;
27.(2)本发明髋关节有随动助力和超速抱紧电机装置,提供膝关节和髋关节同时助力或随动防摔,实现了下肢恢复时大腿随动助力和误摔防护;
28.(3)本发明的5
°
~100
°
的机械限位,和膝关节电机任意角度限位的复合限位,实现了防止人体下肢恢复理疗时误操作或其它原因发生的二次伤害。
附图说明
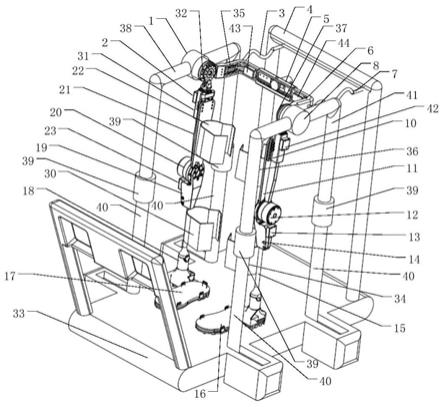
29.图1为膝关节和髋关节助力行走且防摔的下肢恢复装置示意图;
30.图2嵌入式髋关节示意图;
31.图3胯部调节部位示意图;
32.图4膝关节5
°
限位示意图;
33.图5膝关节100
°
限位示意图;
34.图6小腿调节示意图;
35.图7大腿调节示意图。
具体实施方式
36.下面结合实施例对本发明作进一步阐述。
37.如图1
‑
7所示,一种膝关节和髋关节助力行走且防摔的下肢恢复装置,包括:模拟平台部分,含模拟平台33,可以模拟平整路面、阶梯路面和斜坡路面等实现人体康复的关键指标。
38.左右扶柱、系统供电、腰间及后背防护部分,含下肢右髋关节转轴可调防护固定杠1、下肢右髋关节上移扶柱38、扶柱调节螺母及锁紧装置39、下肢扶柱下端调节柱40和下肢左髋关节转轴可调防护固定杠8、扶柱调节螺母及锁紧装置39、下肢扶柱下端调节柱40、下肢左髋关节上移扶柱41;
39.下肢右髋关节上移扶柱38和下肢扶柱下端调节柱40通过扶柱调节螺母及锁紧装
置39连接并固定在模拟平台33,通过调节扶柱调节螺母及锁紧装置39和下肢扶柱下端调节柱40的位置可实现上下即高度的调节和左右即宽度的调节,下肢左髋关节上移扶柱41和下肢扶柱下端调节柱40通过扶柱调节螺母及锁紧装置39连接并固定在模拟平台33,通过调节扶柱调节螺母及锁紧装置39和下肢扶柱下端调节柱40的位置可实现上下即高度的调节和左右即宽度的调节;
40.腰间及后背防护固定杠4实现康复人员腰间和后背的防护作用,装置右侧拉索及供电线3、装置左侧拉索及供电线7一端通过螺钉固定在腰间及后背防护固定杠4,另一端一端通过螺钉固定在左胯部连接6、右胯部连接35
41.左右大小腿角度弯曲及膝关节助力、负载部分,包含左大腿齿形调节下端11、左膝关节助力负载电机12、左侧膝关节控制器13、左小腿调节上端14、左右下肢上限位接触块28、左右下肢下限位接触快29、左大腿束带36、左小腿调节下端15、左腿连接脚16、左小腿束带34和右大腿束带22、右侧膝关节控制器23、右小腿调节上端19、右膝关节助力负载电机20、右大腿齿形调节下端21、左右下肢上限位接触块28、左右下肢下限位接触快29、右小腿束带30、右小腿调节下端18、右腿连接脚17;
42.左膝关节助力负载电机12通过螺钉固定在左大腿齿形调节下端11即左膝关节助力负载电机12定子通过螺钉固定在左大腿齿形调节下端11,左小腿调节上端14通过螺钉固定在左膝关节助力负载电机12转子部位,左右下肢上限位接触块28和左大腿齿形调节下端11为一体设计、左右下肢下限位接触快29和左小腿调节上端14为一体设计,左大腿束带36通过螺钉固定在左大腿齿形调节下端11,左小腿束带34通过螺钉固定在左小腿调节下端15;
43.右膝关节助力负载电机20通过螺钉固定在右大腿齿形调节下端21即右膝关节助力负载电机20定子通过螺钉固定在右大腿齿形调节下端21,右小腿调节上端19通过螺钉固定在右膝关节助力负载电机20转子部位,右小腿调节上端19左右下肢上限位接触块28和右大腿齿形调节下端21为一体设计、左右下肢下限位接触快29和右小腿调节上端19为一体设计,右大腿束带22通过螺钉固定在右大腿齿形调节下端21,右小腿束带30通过螺钉固定在右小腿调节下端18。
44.当右侧膝关节控制器23、左侧膝关节控制器13控制左膝关节助力负载电机12和右膝关节助力负载电机20任意起始位置助力行走或体能恢复负载时,左小腿调节上端14、右小腿调节上端19发生转动,左右下肢上限位接触块28、左右下肢下限位接触快29始终保持大腿和小腿弯曲角度为5
°‑
100
°
的机械限位,此时膝关节电机也可实现任意角度程序限位,采用两种限位的形式,实现了避免在人体恢复理疗时误操作或其它原因过度弯曲引起二次伤害
45.下肢小腿高度调节部分,含左小腿调节上端14、左小腿调节下端15和右小腿调节下端18、右小腿调节上端19;
46.左小腿调节下端15插入左小腿调节上端14,通过锁紧左小腿调节上端14的螺钉实现左下肢小腿长度的无极调节;
47.右小腿调节下端18插入右小腿调节上端19,通过锁紧右小腿调节上端19的螺钉实现由下肢小腿长度的无极调节。
48.下肢大腿高度调节部分,含左大腿齿形调节上端10、左大腿齿形调节下端11和右
大腿齿形调节下端21、右大腿齿形调节上端31;
49.左大腿齿形调节下端11用螺钉安装在左大腿齿形调节上端10,通过左大腿齿形调节上端10、左大腿齿形调节下端11间的齿形有级定位和螺钉锁紧实现左下肢大腿高度有级调节;
50.右大腿齿形调节下端21用螺钉安装在右大腿齿形调节上端31,通过右大腿齿形调节下端21、右大腿齿形调节上端31间的齿形有级定位和螺钉锁紧实现右下肢大腿高度有级调节,髋关节到膝关节12
±
0.3mm有级(
±
4级)长度可调、膝关节到脚面无极(
±
46mm)可调。
51.康复人体胯部宽度无极调节部分,含人体宽度调节电机5、左胯部连接6左旋涡轮24、左旋蜗杆25、右旋蜗杆26、右旋涡轮27,右胯部连接35、人体胯部宽度调节电机控制器ⅰ43、人体胯部宽度调节电机控制器ⅱ44,人体胯部宽度调节电机5与左旋涡轮24、右旋涡轮27连接,左旋涡轮24、右旋涡轮27与左旋蜗杆25、右旋蜗杆26连接,左旋蜗杆25、右旋蜗杆26固定在左胯部连接6、右胯部连接35,当人体胯部宽度调节电机控制器ⅰ43、人体胯部宽度调节电机控制器ⅱ44控制人体宽度调节电机5转动时,带动左旋涡轮24、右旋涡轮27转动,此时左旋蜗杆25、右旋蜗杆26左右移动,并带动左胯部连接6、右胯部连接35实现宽度调节,自调节为感知自动调节,康复人体宽度无极(
±
56mm)可调。
52.左右髋关节助力、负载及防摔部分,含下肢右髋关节转轴可调防护固定杠1、右侧髋关节控制器2、右大腿齿形调节上端31、右嵌入电机组件32和下肢左髋关节转轴可调防护固定杠8、左大腿齿形调节上端10、左嵌入电机组件37、左侧髋关节控制器42;
53.右嵌入电机组件32安装在下肢右髋关节转轴可调防护固定杠1即右嵌入电机组件32定子通过螺钉固定在下肢右髋关节转轴可调防护固定杠1,右大腿齿形调节上端31与右嵌入电机组件32固定即右大腿齿形调节上端31通过螺钉固定在右嵌入电机组件32的转子上,右侧髋关节控制器2固定在右大腿齿形调节上端31端面,此时右髋关节助力、负载及防摔部分的右嵌入电机组件32转动带动右大腿齿形调节上端31,则右大腿齿形调节上端31随动助力、随动负载大腿,右嵌入电机组件32还是超速抱紧电机,超速抱紧电机判别何时抱紧的条件是膝关节和髋关节均匀助力,当突然有转速或扭矩超过髋关节助力的转速和扭矩时,电机抱紧,以实现下肢恢复时的随动助力和误摔防护。
54.左嵌入电机组件37安装在下肢左髋关节转轴可调防护固定杠8即左嵌入电机组件37定子通过螺钉固定在下肢左髋关节转轴可调防护固定杠8,左大腿齿形调节上端10与左嵌入电机组件37固定即左大腿齿形调节上端10通过螺钉固定在左嵌入电机组件37的转子上,左侧髋关节控制器42固定在左大腿齿形调节上端10端面,此时左髋关节助力、负载及防摔部分的左嵌入电机组件37转动带动左大腿齿形调节上端10,左大腿齿形调节上端10有随动助力、随动负载大腿,左嵌入电机组件37还是超速抱紧电机,超速抱紧电机判别何时抱紧抱紧的条件是膝关节和髋关节均匀助力,当突然有转速或扭矩超过髋关节助力的转速和扭矩时,电机抱紧,以实现下肢恢复时的随动助力和误摔防护。
55.左右扶柱和腰间及后背防护部分,通过螺钉组件固定在模拟平台部分,下肢小腿高度调节部分和下肢大腿高度调节部分,通过螺钉组件固定
56.在左右大小腿角度弯曲及膝关节助力、负载部分,康复人体胯部宽度无极调节部分,通过螺钉组件固定在左右髋关节助力、负载及防摔部分,此时装配连接结束。
57.本发明模拟真实复杂道路工况(如:平路、坡路、台阶等)加入防摔设计和保护功
能,解决了人体下肢恢复时未能发现的更真实的待恢复弱点问题。
58.本发明装置共5个助力电机,可实现下肢助力和不同人体型(包括胯部宽度,大腿和小腿长度)的调节、助力(膝关节和髋关节可实现0
‑
75nm助力)和人体负载(膝关节和髋关节可实现0
‑
25nm负载的无极调节,结合模拟平路、坡路、台阶、防护等的平台,解决在人体下肢恢复时未能发现的复杂工况下的下肢恢复弱点的问题,实现了安全防护并避免在人体恢复理疗时误操作或其它原因引起的二次伤害,。
59.通过设置髋关节有随动助力和超速抱紧电机装置,解决了下肢恢复时大腿不能随动助力的问题,并实现了误摔防护(图2)。
60.髋关节有随动助力和超速抱紧电机装置,随动助力和超速抱紧电机装置嵌入模拟平路、坡路、台阶、防护等的平台,超速抱紧电机判别何时抱紧抱紧的条件是膝关节和髋关节均匀助力,当突然有转速或扭矩超过髋关节助力的转速和扭矩时,电机抱紧,以实现下肢恢复时的随动助力和误摔防护。
61.通过在大腿和小腿设置5
°
~100
°
的机械限位,和膝关节电机任意角度限位的复合限位,解决了人体恢复理疗时误操作或其它原因发生的二次伤害(图4、图5)。
62.大腿和小腿设置5
°‑
100
°
的一个部位的两个角度的机械限位,膝关节电机任意角度程序限位,采用两种的复合限位的形式,实现了避免在人体恢复理疗时误操作或其它原因过度弯曲引起的二次伤害。
63.通过同轴的左旋涡轮蜗杆(齿轮齿条)和右旋涡轮蜗杆(齿轮齿条),采用单一电机的转动,实现人体宽度的自动调节(图3)。
64.同轴的左旋涡轮蜗杆(齿轮齿条)和右旋涡轮蜗杆(齿轮齿条),当电机转动时左旋涡轮蜗杆(齿轮齿条)和右旋涡轮蜗杆(齿轮齿条)移动方向相反,实现了采用单一电机的正反转动,实现人体宽度的自动调节。
65.通过髋关节到膝关节长度可调、膝关节到脚面关节可调、人体宽度可调和可移动下肢恢复机的相对位置可调实现满足不同身高和体宽的人群(图1)。
66.髋关节到膝关节12
±
0.3mm有级(
±
4级)长度可调、膝关节到脚面无极(
±
46mm)可调、人体宽度无极(
±
56mm)可调和可移动下肢恢复机的相对位置无极可调实现满足不同身高和体宽的人群。
67.本发明通过外骨骼助力装置嵌入模拟复杂地面工况等实现下肢的助力、防摔和恢复;通过设置髋关节有随动助力和超速抱紧电机装置,实现下肢恢复时的随动助力和误摔防护。通过同轴的左旋涡轮蜗杆(齿轮齿条)和右旋涡轮蜗杆(齿轮齿条),用一台小电机的顺时针和逆时针的转动,实现人体宽度的自动调节。
68.本发明(图1)研究的一种膝关节和髋关节助力行走且防摔的下肢恢复装置可直接用于病人下肢康复训练,为今后其他下肢恢复奠定了坚实的技术基础。
69.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。