1.本发明属于外科手术设备技术领域,具体涉及一种外科手术用的机械臂。
背景技术:
2.以腹腔镜手术为代表的微创外科被誉为20世纪医学科学对人类文明的重要贡献之一,微创手术操作是指医生利用细长的手术工具通过人体表面的微小切口探入到体内进行手术操作。它与传统的开口手术相比具有手术切口小、出血量少、术后疤痕小、恢复时间快等优点,这使得病人遭受的痛苦大大减少;为此微创外科被广泛的应用于临床手术。微创手术能够为病人带来诸多利益,但对医生的操作增加了一系列难度,如:1)由于体表插入孔的限制,工具的自由度减少至四个,灵活性大大降低;2)器械操作方向与医生的直觉方向相反,协调性差;3)医生手部的抖动可能会被细长的手术工具放大;4)术野为二维平面成像,缺乏深度上的感觉;5)缺乏力感觉。因此,医生必须经过长期训练才能够进行微创手术操作,即便如此,目前微创手术也仅仅应用在操作相对比较简单的手术过程之中。因此,在微创外科手术领域中迫切需要一种机器人系统来辅助医生能够克服上述缺陷,更容易的完成微创手术操作。目前,能够在临床上使用的微创外科手术机器人系统只有da vinci系列和zeus系统,但它们都有体积庞大、价格昂贵等方面的缺点。小型化和低成本微创手术机器人系统是未来发展趋势。
技术实现要素:
3.本发明所要解决的技术问题是针对上述现有技术的不足提供一种外科手术用的机械臂,其结构简单且紧凑,性能稳定可靠且自由度高,精度高且可以安装多种工具,应用范围广。
4.为实现上述技术目的,本发明采取的技术方案为:
5.一种外科手术用的机械臂,其特征在于:包括底座、旋转电机、第一角度滑台、支柱、单轴机器人、驱动电机、第一驱动电机、y轴驱动电机、电机安装座、横梁、第一转接板、z轴微动滑台、第二转接板、z轴驱动电机、y轴微动滑台、第二驱动电机、第三转接板、第二角度滑台、电动转台、电动手爪、手指、x轴微动滑台和x轴驱动电机,所述的支柱固定安装在底座上,所述的横梁固定安装在支柱上,所述的第二转接板固定安装在横梁上,所述的单轴机器人固定安装在第二转接板上,所述的电机安装座安装在单轴机器人右侧面上,所述的驱动电机固定安装在电机安装座上且驱动电机输出轴通过联轴器与单轴机器人连接,所述的z轴微动滑台安装在单轴机器人的滑台上,所述的z轴驱动电机安装在z轴微动滑台上,所述的第一转接板固定安装在z轴微动滑台的滑台上,所述的x轴微动滑台安装在第一转接板的底面上,所述的x轴驱动电机安装在x轴微动滑台上,所述的y轴微动滑台安装在x轴微动滑台的滑台上,所述的y轴驱动电机安装在y轴微动滑台上,所述的第一角度滑台安装在y轴微动滑台的滑台上,所述的第一驱动电机安装在第一角度滑台上,所述的第二角度滑台安装在第一角度滑台的滑台上,所述的第二驱动电机安装在第二角度滑台上,所述的电动转台
安装在第二角度滑台的滑台上,所述的旋转电机安装在电动转台上,所述的第三转接板固定安装在电动转台的转台上,所述的电动手爪固定安装在第三转接板上,所述的手指安装在电动手爪上。
6.上述的电动转台上安装有支架且支架上安装有高清摄像头。
7.上述的手指上安装有夹具且夹具上安装有手术器械。
8.上述的第一转接板上安装有加强筋板。
9.上述的单轴机器人通过定位销定位安装在第二转接板上。
10.本发明中的驱动电机带动单轴机器人进行x向大范围移动,单轴机器人采用滚珠丝杠加导轨结构形式,从而大大提高了起运动精度和结构刚性;因而带动z轴微动滑台进行x向移动,而z轴驱动电机带动z轴微动滑台进行上下移动,z轴微动滑台采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动x轴微动滑台进行z向定位移动,而x轴驱动电机带动x轴微动滑台进行左右移动,x轴微动滑台采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动y轴微动滑台进行x向定位移动,而y轴驱动电机带动y轴微动滑台进行前后移动,y轴微动滑台采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动第一角度滑台进行y向定位移动,而第一驱动电机带动第一角度滑台绕着y轴进行转动定位,第一角度滑台采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动第二角度转台绕着y轴转动定位,而第二驱动电机带动第二角度转台绕着x轴进行转动定位,第二角度滑台采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动电动转台绕着x轴转动定位,而旋转电机带动电动转台绕着z轴转动,电动转台采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动电动手爪绕着z轴进行定位操作,而电动手爪带动手指进行开闭操作,从而实现手术器械夹具的夹紧和松开操作;通过电动转台上安装的高清摄像头可以实现监控和观测手术工作过程。
11.本发明的优点在于以下几点:结构简单且紧凑,性能稳定可靠且自由度高,精度高且可以安装多种工具,应用范围广。
附图说明
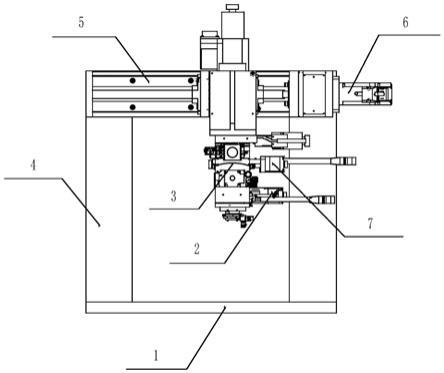
12.图1是本发明的结构主视图;
13.图2是本发明的结构俯视图;
14.图3是本发明的结构左视图;
15.图4是本发明的结构右视图。
16.其中的附图标记为:底座1、旋转电机2、第一角度滑台3、支柱4、单轴机器人5、驱动电机6、第一驱动电机7、y轴驱动电机8、电机安装座9、横梁10、第一转接板11、z轴微动滑台12、第二转接板13、z轴驱动电机14、y轴微动滑台15、第二驱动电机16、第三转接板17、第二角度滑台18、电动转台19、电动手爪20、手指21、x轴微动滑台22、x轴驱动电机23。
具体实施方式
17.下面结合附图对本发明的具体实施方式作出进一步说明:
18.一种外科手术用的机械臂,其特征在于:包括底座1、旋转电机2、第一角度滑台3、支柱4、单轴机器人5、驱动电机6、第一驱动电机7、y轴驱动电机8、电机安装座9、横梁10、第
一转接板11、z轴微动滑台12、第二转接板13、z轴驱动电机14、y轴微动滑台15、第二驱动电机16、第三转接板17、第二角度滑台18、电动转台19、电动手爪20、手指21、x轴微动滑台22和x轴驱动电机23,所述的支柱4固定安装在底座1上,所述的横梁10固定安装在支柱4上,所述的第二转接板13固定安装在横梁10上,所述的单轴机器人5固定安装在第二转接板13上,所述的电机安装座9安装在单轴机器人5右侧面上,所述的驱动电机6固定安装在电机安装座9上且驱动电机6输出轴通过联轴器与单轴机器人5连接,所述的z轴微动滑台12安装在单轴机器人5的滑台上,所述的z轴驱动电机14安装在z轴微动滑台12上,所述的第一转接板11固定安装在z轴微动滑台12的滑台上,所述的x轴微动滑台22安装在第一转接板11的底面上,所述的x轴驱动电机23安装在x轴微动滑台22上,所述的y轴微动滑台15安装在x轴微动滑台22的滑台上,所述的y轴驱动电机8安装在y轴微动滑台15上,所述的第一角度滑台3安装在y轴微动滑台15的滑台上,所述的第一驱动电机7安装在第一角度滑台3上,所述的第二角度滑台18安装在第一角度滑台3的滑台上,所述的第二驱动电机16安装在第二角度滑台18上,所述的电动转台19安装在第二角度滑台18的滑台上,所述的旋转电机2安装在电动转台19上,所述的第三转接板17固定安装在电动转台19的转台上,所述的电动手爪20固定安装在第三转接板17上,所述的手指21安装在电动手爪20上。
19.实施例中,电动转台19上安装有支架且支架上安装有高清摄像头。
20.实施例中,手指21上安装有夹具且夹具上安装有手术器械。
21.实施例中,第一转接板11上安装有加强筋板。
22.实施例中,单轴机器人5通过定位销定位安装在第二转接板13上。
23.本发明中的驱动电机6带动单轴机器人5进行x向大范围移动,单轴机器5人采用滚珠丝杠加导轨结构形式,从而大大提高了起运动精度和结构刚性;因而带动z轴微动滑台12进行x向移动,而z轴驱动电机14带动z轴微动滑台12进行上下移动,z轴微动滑台12采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动x轴微动滑台22进行z向定位移动,而x轴驱动电机23带动x轴微动滑台22进行左右移动,x轴微动滑台22采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动y轴微动滑台15进行x向定位移动,而y轴驱动电机8带动y轴微动滑台15进行前后移动,y轴微动滑台15采用滚珠丝杠加导轨结构形式,因而其定位精度高且结构刚性大;因而带动第一角度滑台3进行y向定位移动,而第一驱动电机7带动第一角度滑台3绕着y轴进行转动定位,第一角度滑台3采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动第二角度转台18绕着y轴转动定位,而第二驱动电机16带动第二角度转台18绕着x轴进行转动定位,第二角度滑台18采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动电动转台19绕着x轴转动定位,而旋转电机2带动电动转台19绕着z轴转动,电动转台19采用蜗轮蜗杆传动,因而提高了其承载能力和传动定位精度;因而带动电动手爪20绕着z轴进行定位操作,而电动手爪20带动手指21进行开闭操作,从而实现手术器械夹具的夹紧和松开操作;通过电动转台20上安装的高清摄像头可以实现监控和观测手术工作过程。
24.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。