1.本发明涉及一种补苗移栽机械,特别是涉及一种移动式、紧凑型的立体补苗平台。
背景技术:
2.我国是蔬菜生产大国,蔬菜年产量约占世界年生产总量的60%,其中叶菜年产量占蔬菜年生产总量的1/3左右。叶菜种苗的培育是在育苗温室的苗床上进行的,在育苗过程中,育苗穴盘中会存在5%
‑
20%的劣苗,需要剔除并补入优苗。目前剔补苗作业主要是工人在育苗温室中进行,劳动强度大,密集程度高,市场上也出现剔补苗移栽机,但大多都为固定式,通常放置于育苗温室之外,需要人工对穴盘进行搬运,且功能单一,结构冗杂,体积庞大,无法方便的搬运。针对这一点,开展移动式立体补苗平台的研究是极为必要的。
技术实现要素:
3.本发明的目的是克服上述背景技术的不足,提供一种移动式立体补苗平台;该平台由人工遥控在温室苗床行间进行行走,可在温室苗床狭隙空间中实现自动补苗作业,减少苗床搬运环节,提高补苗作业工作效率,有利于育苗产业规模化。
4.本发明提供的移动式立体补苗平台,包括机架与底盘、光照箱及相机、x方向补苗臂、y方向补苗臂、供苗盘输送机构、检测穴盘输送机构、补苗盘输送机构。
5.所述的机架与底盘为本平台的基本结构框架,其中机架固连在底盘上方并把空间分割为两个区域,分别为视觉检测区和补苗作业区;在视觉检测区上方设置有光照箱及相机用于采集并处理穴盘幼苗健康信息,下方设置有检测穴盘输送机构,此处为补苗作业穴盘入口;补苗作业区上方设置有两对平行布置的导轨分别为x方向补苗臂支撑型材及导轨和y方向补苗臂支撑型材及导轨,两对导轨在竖直空间上由上向下排布并固连在机架上,用于补苗臂的移动,x方向补苗臂和y方向补苗臂分别固定在导轨滑块上;补苗作业区下方供苗盘输送机构与补苗盘输送机构由左至右依次排布,并分别固定在补(供)苗盘输送机构上行导轨滑块上,在穴盘输送机构两侧分别设置了补(供)苗盘输送机构上行气缸用于输送机构的上下移动,其进给距离为上下两传送带的间距。
6.所述x方向补苗臂由补苗执行器、补苗机构导轨、补苗机构线性模组、补苗臂机架、补苗臂横移电机、齿轮支撑板、张紧轮、小带轮、轴承座、同步轴、轴承、大带轮、电机带轮构成;补苗臂机架与x方向补苗臂支撑型材及导轨上滑块固连可沿导轨滑动,补苗机构导轨和补苗机构线性模组分别平行布置在补苗臂机架长边两侧,补苗执行器横跨在两者之间,由线性模组驱动补苗执行器可进行平移运动,齿轮支撑板分别固连在分别平行布置在补苗臂机架短边两侧,并且齿轮支撑板上开有多个通孔,轴承座和两个张紧轮固连在支撑板上,轴承座内部嵌有轴承,同步轴布置在两个齿轮支撑板中间,并穿过与其键连接的小齿轮以达到x方向补苗臂两端同步移动的作用;在x方向补苗臂驱动侧,齿轮支撑板上固定有补苗臂横移电机,电机轴穿过支撑板与电机带轮通过键连接,电机带轮与大带轮通过带传动,同时大带轮通过平键与同步轴连接,并将电机动力通过同步轴传递至小带轮,两侧小带轮及张
紧轮上有同步带,同步带两端固定在机架上,x方向补苗臂可通过补苗臂横移电机驱动,并通过同步轴和同步带的作用实现两端同步移动。
7.所述y方向补苗臂与上述x方向补苗臂结构大致相同,仅在尺寸上有些不同,y方向补苗臂与x方向补苗臂支撑型材及导轨上滑块固连可沿导轨滑动;
8.所述补苗执行器由进给电机、电机固定板、丝杆移动块、固定板、丝杆、丝杆固定架、丝杆固定板、移动块导向杆、执行器固定板、末端执行器构成,补苗执行器通过电机固定板分别与补苗臂固连,可由线性模组带动进行平移;固定板上开有多个通孔,丝杆固定架穿过固定板并与其固连,丝杆固定架上端设置有电机固定板,下端设置有丝杆固定板,电机固定板上方固定有进给电机为末端执行器的上下进给提供动力,进给电机传动轴通过联轴器与丝杆固连,丝杆另一端通过轴承与丝杆固定板相连,丝杆穿过丝杆移动块,移动块两侧设置有移动块导向杆,导向杆下方与执行器固定板固连;末端执行器由气缸驱动可进行上下取苗放苗动作,其固连在执行器固定板上,进给电机通过丝杆转动驱动丝杆移动块,进而实现末端执行器的上下运动。
9.所述供苗盘输送机构由上输送带、输送机构机架、穴盘压轮、阻挡气缸、定位传感器、穴盘导轨、电机支架、上驱动电机、下输送带、下驱动电机、上行气缸支撑型材构成,整体机构由输送机构机架与底盘固连,机架上方两侧固定有一对穴盘导轨,两穴盘导轨间距为所使用穴盘长度,且间距可调,导轨上布置有保证穴盘在作业时不被带起的穴盘压轮、检测穴盘到位并进行阻挡的定位传感器和阻挡气缸;输送带布置在上方型材中间,电机支架布置在输送带下方与型材固连,上驱动电机固定在电机支架上,电机通过带传动驱动传送带运动;供苗盘输送机构为双层输送带结构,上述相同结构以一定间距布置于上输送带下方,下输送带由下驱动电机驱动其他结构如上所述,下输送带与上驱动电机间隔以可以顺利通过穴盘为准。
10.所述检测穴盘输送机构与上述供苗盘输送机构结构大致相同,其为单层输送带结构,用于检测穴盘的输入。所述补苗盘输送机构与上述供苗盘输送机构结构相同,与供苗盘输送机构平行布置。
11.本发明的有益效果:
12.本发明提供的叶菜种苗水培移植装置,由机架、穴盘工作台、穴盘定位机构、穴盘进给机构、种苗移植机构、水培管工作台、水培管定位机构和水培管进给机构组成;通过穴盘定位机构、种苗移植机构和水培管定位机构实现种苗移植高效对准取苗和精准植苗,可减轻种苗破损,提高种苗存活率;通过穴盘进给机构和水培管进给机构可实现叶菜种苗移植过程全自动化流程,提高工作效率,实现叶菜种苗移植过程规模化生产;有利于提高叶菜生产总量。
附图说明
13.图1为本发明的立体结构示意图之一。
14.图2为本发明的立体结构示意图之二。
15.图3为本发明的机架及底盘立体结构示意图。
16.图4为本发明中x方向补苗臂机构的立体结构示意图之一。
17.图5为本发明中x方向补苗臂机构的立体结构示意图之二。。
18.图6为本发明中补苗执行器的立体结构示意图。
19.图7为本发明中供(补)苗盘输送机构的立体结构示意图。
20.图8为本发明中检测穴盘输送机构的立体结构示意图。
21.附图标记:
22.01—机架与底盘、0101—机架、0102—底盘、0103—x方向补苗臂支撑型材及导轨、0104—补(供)苗盘输送机构上行导轨、0105—y方向补苗臂支撑型材及导轨、0106—补(供)苗盘输送机构上行气缸、02—光照箱及相机、03—x方向补苗臂、0301—补苗执行器、030101—进给电机、030102—电机固定板、030103—丝杆移动块、030104—固定板、030105—丝杆、030106—丝杆固定架、030107—丝杆固定板、030108—丝杆导向杆、030109—执行器固定板、030110—末端执行器、0302—补苗机构导轨、0303—补苗机构线性模组、0304—补苗臂机架、0305—补苗臂横移电机、0306—齿轮支撑板、0307—张紧轮、0308—小带轮、0309—轴承座、0310—同步轴、0311—轴承、0312—大带轮、0313—电机带轮、04—y方向补苗臂、05—供苗盘输送机构、0501—上输送带、0502—输送机构机架、0503—穴盘压轮、0504—阻挡气缸、0505—定位传感器、0506—穴盘导轨、0507—电机支架、0508—上驱动电机、0509—下输送带、0510—下驱动电机、0511—上行气缸支撑型材、06—检测穴盘输送机构、07—补苗盘输送机构。
具体实施方式
23.下面结合附图对本发明作进一步描述。
24.常规的育苗温室作业是由工人在育苗苗床之间进行补苗作业,由于人工作业劳动强度大、生产效率低、规模化产出效益低,且现有补苗装备结构冗杂体积庞大,在使用期间需要人工将穴盘搬运出温室进行作业,因此,本发明研制了移动式的立体补苗平台。
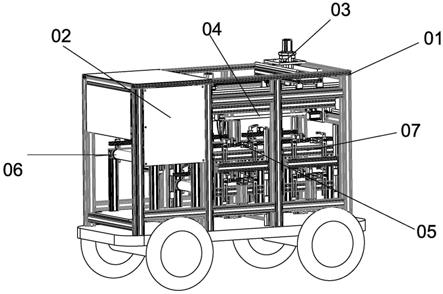
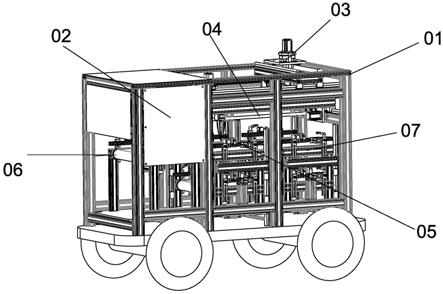
25.本发明提供的移动式立体补苗平台,包括机架与底盘01、光照箱及相机02、x方向补苗臂03、y方向补苗臂04、供苗盘输送机构05、检测穴盘输送机构06、补苗盘输送机构07。
26.所述的机架与底盘01为本平台的基本结构框架,其中机架0101固连在底盘0102上方并把空间分割为两个区域,分别为视觉检测区和补苗作业区;在视觉检测区上方设置有光照箱及相机02用于采集并处理穴盘幼苗健康信息,下方设置有检测穴盘输送机构06,此处为补苗作业穴盘入口;补苗作业区上方设置有两对平行布置的导轨分别为x方向补苗臂支撑型材及导轨0103和y方向补苗臂支撑型材及导轨0105,两对导轨在竖直空间上由上向下排布并固连在机架0101上,用于补苗臂的移动,x方向补苗臂03和y方向补苗臂04分别固定在导轨滑块上;补苗作业区下方供苗盘输送机构05与补苗盘输送机构07由左至右依次排布,并分别固定在补(供)苗盘输送机构上行导轨0104滑块上,在穴盘输送机构两侧分别设置了补(供)苗盘输送机构上行气缸0106用于输送机构的上下移动,其进给距离为上下两传送带的间距。
27.所述x方向补苗臂03(参照图4)由补苗执行器0301、补苗机构导轨0302、补苗机构线性模组0303、补苗臂机架0304、补苗臂横移电机0305、齿轮支撑板0306、张紧轮0307、小带轮0308、轴承座0309、同步轴0310、轴承0311、大带轮0312、电机带轮0313构成;补苗臂机架0304与x方向补苗臂支撑型材及导轨0103上滑块固连可沿导轨滑动,补苗机构导轨0302和补苗机构线性模组0303分别平行布置在补苗臂机架0304长边两侧,补苗执行器0301横跨在
两者之间,由线性模组驱动补苗执行器可进行平移运动,齿轮支撑板0306分别固连在分别平行布置在补苗臂机架0304短边两侧,并且齿轮支撑板上开有多个通孔,轴承座0309和两个张紧轮0307固连在支撑板上,轴承座0309内部嵌有轴承0311,同步轴0310布置在两个齿轮支撑板0306中间,并穿过与其键连接的小齿轮0308以达到x方向补苗臂03两端同步移动的作用;在x方向补苗臂03驱动侧,齿轮支撑板0306上固定有补苗臂横移电机0305,电机轴穿过支撑板与电机带轮0313通过键连接,电机带轮0313与大带轮0312通过带传动,同时大带轮通过平键与同步轴0310连接,并将电机动力通过同步轴传递至小带轮0308,两侧小带轮0308及张紧轮0307上有同步带,同步带两端固定在机架上0101,x方向补苗臂03可通过补苗臂横移电机0305驱动,并通过同步轴0310和同步带的作用实现两端同步移动。
28.所述y方向补苗臂04与上述x方向补苗臂03结构大致相同,仅在尺寸上有些不同,y方向补苗臂04与x方向补苗臂支撑型材及导轨0105上滑块固连可沿导轨滑动,x方向补苗臂在进行二位运动时其补苗执行器0301由进给电机驱动收回至y方向补苗臂上方,二者互不影响;
29.所述补苗执行器0301(参照图6)由进给电机030101、电机固定板030102、丝杆移动块030103、固定板030104、丝杆030105、丝杆固定架030106、丝杆固定板030107、移动块导向杆030108、执行器固定板030109、末端执行器030110构成,补苗执行器0301通过电机固定板030102分别与补苗臂固连,可由线性模组带动进行平移;固定板上开有多个通孔,丝杆固定架030106穿过固定板030102并与其固连,丝杆固定架上端设置有电机固定板030102,下端设置有丝杆固定板030107,电机固定板上方固定有进给电机030101为末端执行器030110的上下进给提供动力,进给电机传动轴通过联轴器与丝杆030105固连,丝杆另一端通过轴承与丝杆固定板030107相连,丝杆穿过丝杆移动块030103,移动块两侧设置有移动块导向杆030108,导向杆下方与执行器固定板030109固连;末端执行器030110由气缸驱动可进行上下取苗放苗动作,其固连在执行器固定板030109上,进给电机通过丝杆转动驱动丝杆移动块030103,进而实现末端执行器030110的上下运动。
30.所述供苗盘输送机构05(参照图7)由上输送带0501、输送机构机架0502、穴盘压轮0503、阻挡气缸0504、定位传感器0505、穴盘导轨0506、电机支架0507、上驱动电机0508、下输送带0509、下驱动电机0510、上行气缸支撑型材0511构成,整体机构由输送机构机架0502与底盘0102固连,机架上方两侧固定有一对穴盘导轨0506,两穴盘导轨间距为所使用穴盘长度,且间距可调,导轨上布置有保证穴盘在作业时不被带起的穴盘压轮0503、检测穴盘到位并进行阻挡的定位传感器0505和阻挡气缸0504;输送带0501布置在上方型材中间,电机支架0507布置在输送带下方与型材固连,上驱动电机0508固定在电机支架上,电机通过带传动驱动传送带0501运动;供苗盘输送机构05为双层输送带结构,上述相同结构以一定间距布置于上输送带下方,下输送带0509由下驱动电机0510驱动其他结构如上所述,下输送带与上驱动电机间隔以可以顺利通过穴盘为准。
31.所述检测穴盘输送机构06(参照图8)与上述供苗盘输送机构05结构大致相同,其为单层输送带结构,用于检测穴盘的输入。
32.所述补苗盘输送机构07(参照图8)与上述供苗盘输送机构05结构相同,与供苗盘输送机构平行布置。
33.本发明中,各机构及组件的工作位置信号分别由若干个传感器(包括接近开关)输
至控制器(优选plc;图中省略),再由控制器对各机构及组件的工作次序与动作行程分别进行控制;这些均为常规控制技术,本文不再一一细述。
34.本发明的运行过程,包括如下步骤:
35.步骤一、穴盘从检测穴盘输送机构放入,有传感器检测并停止,获取图像提取健康信息;
36.步骤二、继续放置穴盘同时进行图像处理,供苗盘输送机构与补苗盘输送机构上传感器检测均无穴盘,穴盘经传送带输送至补苗盘输送机构;
37.步骤三、继续放置穴盘同时进行图像处理,供苗盘输送机构传感器检测无穴盘,补苗盘输送机构传感器检测有穴盘,穴盘经传送带输送至供苗盘输送机构;
38.步骤四、继续放置穴盘同时进行图像处理,供苗盘输送机构与补苗盘输送机构上传感器检测均有穴盘,穴盘停留在检测穴盘输送机构上并停止;
39.步骤五、供苗盘输送机构与补苗盘输送机构上传感器检测均有穴盘,x方向补苗臂与y方向补苗臂由控制系统分配任务分别进行补苗作业;
40.步骤六、补苗作业完成后穴盘由补苗盘输送机构上输送带输出,供苗盘输送机构由其上行气缸抬起,穴盘从检测穴盘输送机构经由供苗盘输送机构下输送带输送至补苗盘输送机构上输送带;
41.步骤七、重复步骤四,供苗盘被取完,补苗盘输送机构由其上行气缸抬起,穴盘从补苗盘输送机构下输送带输出;
42.步骤八、重复步骤三至七。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。