1.本发明具体是一种具有防碰撞功能的机器人,涉及机器人相关领域。
背景技术:
2.目前,专利申请号:cn211796231u,公开了一种扫地机器人,解决了现有扫地机器人需要用户更换吸尘组件和滚刷组件导致的用户体验差、难以满足用户的清洁需求的问题,同时解决了现有扫地机器人因在吸尘口内安装清洁滚刷导致的吸力下降、清洁效果差的问题。
3.但现有扫地机器人不方便对收纳盒弹出,而不便于使用者便捷取出,导致了在取出收纳盒时操作不便的问题,在对收纳盒抬升时不便于对收纳盒进行提升稳定性,导致了收纳盒在弹出时发生倾斜而造成灰尘垃圾掉出的问题。
技术实现要素:
4.因此,为了解决上述不足,本发明在此提供一种具有防碰撞功能的机器人。
5.本发明是这样实现的,构造一种具有防碰撞功能的机器人,该装置包括机壳、开关键、盖板、传感器、清洁轴、驱动轮、万向轮、吸尘口、收纳盒和弹出装置,所述机壳表面设置有开关键,所述机壳内部位于收纳盒底端设置有弹出装置,所述弹出装置包括抬升板、连杆、滑框、限位杆、滚动体、拉板、弹簧和稳固机构,所述抬升板沿机壳内壁进行滑动连接,连杆通过转轴与抬升板进行转动连接,所述滑框通过连杆沿限位杆表面滑动连接,所述滚动体沿滑框内壁转动连接,所述滑框表面设置有拉板,所述拉板表面设置有弹簧,所述收纳盒表面设置有稳固机构。
6.进一步的,所述盖板通过转轴与机壳进行转动连接,所述机壳表面设置有传感器,所述清洁轴通过驱动器沿机壳表面进行转动连接,所述机壳表面设置有驱动轮,所述机壳底端设置有万向轮,所述机壳内部设置有吸尘口,所述机壳内部设置有收纳盒。
7.进一步的,所述稳固机构包括套筒、固定板、弹性连接件、延伸杆、放置板和垫板,所述机壳内部设置有套筒,所述套筒表面设置有固定板,所述固定板表面设置有弹性连接件,所述延伸杆沿套筒内壁进行滑动连接,所述延伸杆表面设置有放置板,所述收纳盒表面设置有垫板。
8.进一步的,所述抬升板表面设置有倾斜表面,倾斜表面向右倾斜,并且倾斜表面的倾斜角度为五度。
9.进一步的,所述抬升板与收纳盒贴合面设置有防滑垫,并且防滑垫与抬升板表面设置的倾斜表面倾斜角度相同。
10.进一步的,所述限位杆中端设置有固定块,限位杆贯穿于固定块中端,并且限位杆外表面涂有防氧化层。
11.进一步的,两个所述限位杆表面均设置有滑框,两个滑框结构相同且相对称,两个滑框内部均设置有六个滚动体,六个滚动体位于滑框的上下两侧,并且滚动体沿限位杆内
壁进行滑动。
12.进一步的,所述机壳内部设置有弹簧槽,弹簧槽呈半圆形,并且弹簧位于弹簧槽内部,拉板沿弹簧槽内壁进行滑动。
13.进一步的,所述限位杆使用防锈金属材质,使限位杆具有不易弯曲且表面光滑的效果。
14.进一步的,所述拉板使用熟料材质,使拉板具有耐用性高和重量轻的效果。
15.本发明具有如下优点:本发明通过改进在此提供一种具有防碰撞功能的机器人,与同类型设备相比,具有如下改进:优点1:本发明所述一种具有防碰撞功能的机器人,通过机壳内部位于收纳盒底端设置有弹出装置,在需要取出收纳盒时,使用者打开盖板,使弹簧失力,在弹簧失力时,弹力拉动拉板移动,拉板带动滑框沿限位杆表面滑动,滑框沿限位杆表面滑动时,滚动体沿限位杆表面进行滑动而转动,在滑框滑动时,推动连杆,从而对抬升板进行向上抬升滑动,从而将收纳盒进行弹出,达到了使用者在需要取出收纳盒进行清洁时,更便捷的对收纳盒进行拆卸的有益效果。
16.优点2:本发明所述一种具有防碰撞功能的机器人,通过收纳盒表面设置有稳固机构,在抬升板推动收纳盒滑动时,弹性连接件失力,弹力推动放置板,当收纳盒发生倾斜时,推动垫板从而使放置板对弹性连接件进行施力,而弹性连接件产生的弹力对收纳盒产生的力进行相互碰撞直至抵消,从而避免收纳盒发生倾斜,达到了对收纳盒进行防止倾斜的效果,避免收纳盒内部垃圾因倾斜而掉出的有益效果。
附图说明
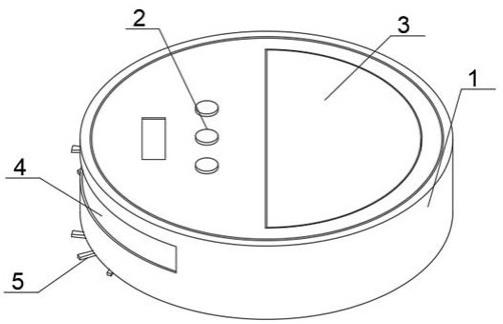
17.图1是本发明结构示意图;图2是本发明机壳1正视结构示意图;图3是本发明弹出装置正视结构示意图;图4是本发明a区域局部放大图;图5是本发明b区域局部放大图。
18.其中:机壳
‑
1、开关键
‑
2、盖板
‑
3、传感器
‑
4、清洁轴
‑
5、驱动轮
‑
6、万向轮
‑
7、吸尘口
‑
8、收纳盒
‑
9、弹出装置
‑
10、抬升板
‑
101、连杆
‑
102、滑框
‑
103、限位杆
‑
104、滚动体
‑
105、拉板
‑
106、弹簧
‑
107、稳固机构
‑
108、套筒
‑
1081、固定板
‑
1082、弹性连接件
‑
1083、延伸杆
‑
1084、放置板
‑
1085、垫板
‑
1086。
具体实施方式
19.下面将结合附图1
‑
5对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.请参阅图1和图2,本发明的一种具有防碰撞功能的机器人,机壳1、开关键2、盖板3、传感器4、清洁轴5、驱动轮6、万向轮7、吸尘口8、收纳盒9和弹出装置10,机壳1表面设置有开关键2,盖板3通过转轴与机壳1进行转动连接,机壳1表面设置有传感器4,清洁轴5通过驱
动器沿机壳1表面进行转动连接,机壳1表面设置有驱动轮6,机壳1底端设置有万向轮7,机壳1内部设置有吸尘口8,机壳1内部设置有收纳盒9,机壳1内部位于收纳盒9底端设置有弹出装置10。
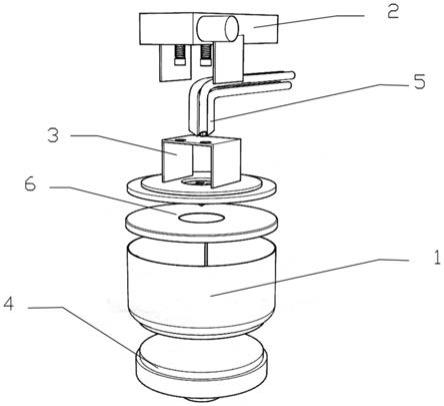
21.请参阅图3和图4,本发明的一种具有防碰撞功能的机器人,弹出装置10包括抬升板101、连杆102、滑框103、限位杆104、滚动体105、拉板106、弹簧107和稳固机构108,抬升板101沿机壳1内壁进行滑动连接,连杆102通过转轴与抬升板101进行转动连接,抬升板1用于对收纳盒9的抬升作用,滑框103通过连杆102沿限位杆104表面滑动连接,滚动体105沿滑框103内壁转动连接,滚动体105用于对滑框103进行提升滑动的效果,滑框103表面设置有拉板106,拉板106表面设置有弹簧107,弹簧107用于驱动抬升板101的作用,收纳盒9表面设置有稳固机构108;抬升板101表面设置有倾斜表面,倾斜表面向右倾斜,并且倾斜表面的倾斜角度为五度,在抬升时使收纳盒9倾斜而避免垃圾掉出的效果;抬升板101与收纳盒9贴合面设置有防滑垫,并且防滑垫与抬升板101表面设置的倾斜表面倾斜角度相同,收纳盒9沿抬升板101表面滑动的作用;限位杆104中端设置有固定块,限位杆104贯穿于固定块中端,并且限位杆104外表面涂有防氧化层,使滑框103具有更好的滑动效果;两个限位杆104表面均设置有滑框103,两个滑框103结构相同且相对称,两个滑框103内部均设置有六个滚动体105,六个滚动体位于滑框103的上下两侧,并且滚动体105沿限位杆104内壁进行滑动,使滑框103具有更好的滑动效果;机壳1内部设置有弹簧槽,弹簧槽呈半圆形,并且弹簧107位于弹簧槽内部,拉板106沿弹簧槽内壁进行滑动,用于对弹簧107的限位,避免弹簧107弯曲而偏移位置的作用;限位杆104使用防锈金属材质,使限位杆104具有不易弯曲且表面光滑的效果;拉板106使用熟料材质,使拉板106具有耐用性高和重量轻的效果。
22.请参阅图5,本发明的一种具有防碰撞功能的机器人,稳固机构108包括套筒1081、固定板1082、弹性连接件1083、延伸杆1084、放置板1085和垫板1086,机壳1内部设置有套筒1081,套筒1081表面设置有固定板1082,固定板1082用于对弹性连接件1083的固定作用,固定板1082表面设置有弹性连接件1083,延伸杆1084沿套筒1081内壁进行滑动连接,延伸杆1084用于推动放置板1085的作用,延伸杆1084表面设置有放置板1085,收纳盒9表面设置有垫板1086,垫板1086用于更好的贴合放置板1085表面的作用。
23.本发明通过改进提供一种具有防碰撞功能的机器人,其工作原理如下;第一,在需要清洁地板时,将机壳1放置于地面,然后通过开关键2开启机壳1,驱动轮6转动转动,从而带动机壳1进行移动,清洁轴5将地面的灰尘垃圾进行清洁,然后通过吸尘口8吸入收纳盒9内部,传感器4用于检测周边是否有障碍物,传感器4检测出有障碍物时,发出信号给机壳1内部配套设备,然后通过万向轮7进行避障,从而防止机壳1碰撞,在需要取出收纳盒9时,打开盖板3,弹出装置10推动收纳盒9,从而取出收纳盒9进行清洗;第二,在需要取出收纳盒9时,使用者转动打开盖板3,盖板3打开使弹簧107失力,由于弹簧107呈受力拉伸状态,所以在弹簧107失力时,弹力拉动拉板106进行移动,拉板106移动带动滑框103沿限位杆104表面进行滑动,因滚动体105与限位杆104相贴合,所以在滑框103沿限位杆104表面滑动时,滚动体105沿限位杆104表面进行滑动而转动,从而提升滑框103的滑动效果,避免出现卡壳的现象,在滑框103滑动时,推动连杆102,从而对抬升板101进行向上抬升滑动,从而将收纳盒9进行弹出,达到了使用者在需要取出收纳盒9进行清洁时,更便捷的对收纳盒9进行拆卸的有益效果;
第三,在抬升板101推动收纳盒9滑动时,弹性连接件1083失力,弹力推动放置板1085贴合于垫板1086表面,当收纳盒9发生倾斜时,推动垫板1086从而使放置板1085对弹性连接件1083进行施力,而弹性连接件1083产生的弹力对收纳盒9产生的力进行相互碰撞直至抵消,从而避免收纳盒9发生倾斜,达到了对收纳盒9进行防止倾斜的效果,避免收纳盒9内部垃圾因倾斜而掉出的有益效果。
24.本发明通过改进提供一种具有防碰撞功能的机器人,通过机壳1内部位于收纳盒9底端设置有弹出装置10,在需要取出收纳盒9时,使用者打开盖板3,使弹簧107失力,在弹簧107失力时,弹力拉动拉板106移动,拉板106带动滑框103沿限位杆104表面滑动,滑框103沿限位杆104表面滑动时,滚动体105沿限位杆104表面进行滑动而转动,在滑框103滑动时,推动连杆102,从而对抬升板101进行向上抬升滑动,从而将收纳盒9进行弹出,达到了使用者在需要取出收纳盒9进行清洁时,更便捷的对收纳盒9进行拆卸的有益效果;通过收纳盒9表面设置有稳固机构108,在抬升板101推动收纳盒9滑动时,弹性连接件1083失力,弹力推动放置板1085,当收纳盒9发生倾斜时,推动垫板1086从而使放置板1085对弹性连接件1083进行施力,而弹性连接件1083产生的弹力对收纳盒9产生的力进行相互碰撞直至抵消,从而避免收纳盒9发生倾斜,达到了对收纳盒9进行防止倾斜的效果,避免收纳盒9内部垃圾因倾斜而掉出的有益效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。