1.本发明涉及智能交通控制领域,具体涉及一种基于交通仿真的路段阻抗函数校正方法。
背景技术:
2.交通分配是交通四阶段分析方法中的重要步骤,而路段阻抗函数是交通分配的核心理论基础。传统的阻抗函数标定方法是基于现场所采集的交通数据,如专利“一种基于参数标定的交通阻抗计算方法”(cn201710263992.0)。但由于阻抗函数标定需要的数据量较大,往往标定的函数准确性较低,不能够准确反映该路段的实际情况。因此,所采集的交通流信息有限,尤其易导致不能覆盖低流量、中流量、高流量等交通情景。
3.交通仿真的优势在于对现有系统或未来系统的交通运行状况进行再现或预先把握,从而对复杂的交通现象进行解释、分析、找出问题的症结,最终对所研究的交通系统进行优化。因此,交通仿真能够获取未观测到的交通流信息,将该信息进一步用作阻抗函数的检验和标定,即可实现阻抗函数的校正工作,进一步提升阻抗函数的准确性和适应性。
技术实现要素:
4.发明目的:为了克服上述现有技术的不足,本发明目的在于提出一种基于交通仿真的路段阻抗函数校正方法,以路段实际交通信息为基本,确定阻抗函数形式并标定阻抗函数参数,再根据实际交通信息,运用交通仿真系统获取模拟交通信息,基于模拟交通信息和实际交通信息,计算模拟行程时间和理论行程时间误差以检验已标定阻抗函数的准确性,若误差大于预设阈值,则将模拟交通信息和实际交通信息合并,重新标定阻抗函数参数,直至误差不大于预设阈值,进而提高阻抗函数的准确性和适应性。
5.技术方案:为解决上述技术问题,本发明采用的技术方案为:
6.一种基于交通仿真的路段阻抗函数校正方法,包括如下步骤:
7.(1)获取路段实际交通信息,将平均车速、交通流量、平均行程时间标记为初始交通流数据集合;
8.(2)确定路段阻抗函数形式与其待标定的参数;
9.(3)根据所述初始交通流数据集合,标定阻抗函数参数;
10.(4)将步骤(3)中标定的参数标记为新一代参数集合;
11.(5)根据所述路段实际交通信息,利用交通仿真系统对该路段交通流进行模拟仿真,预测该路段在不同模拟交通需求下的运行状态,统计对应模拟平均车速和模拟行程时间;
12.(6)标记所述模拟交通需求、模拟平均车速和模拟行程时间为模拟交通流数据集合;
13.(7)将所述模拟交通需求、模拟平均车速和标定完成的参数代入阻抗函数,得到的路段阻抗即为理论行程时间;
14.(8)计算不同模拟交通需求下模拟行程时间与对应理论行程时间的误差;
15.(9)若步骤(8)所述误差的平均值大于预设阈值,则将所述初始交通流数据集合与所述模拟交通流数据集合合并为新一代数据集合,并返回执行步骤(3)执行参数的标定;否则,将所述新一代参数集合作为最终方案,得到完成参数标定的阻抗函数,结束校正过程。
16.作为优选,步骤(1)中,所述路段实际交通信息包括路段限速、平均车速、交通流量、路段长度、道路宽度、车道数量、平均行程时间,将路段限速、路段长度、道路宽度、车道数量作为道路属性,将平均车速、交通流量、平均行程时间作为交通流特征;将同一时间段内获取的平均车速、交通流量、平均行程时间记作一条数据初始交通流数据集合d0中包括n条数据,d0={d1,d2,
…
,d
n
,
…
,d
n
‑1,d
n
}第n条数据d
n
={v
n
,q
n
,t
n
},v
n
、q
n
、t
n
分别为第n条数据中的平均车速、交通流量、平均行程时间,n≥10;
17.作为优选,步骤(2)中,所述路段阻抗函数为:
[0018][0019]
式中t
a
为路段阻抗,实际通过该路段所需要的时间,t
f
为路段自由行驶时间,q为交通流量,c为该路段通行能力,v
d
为该路段限速,v
r
为该路段平均车速,{k1,k2,k3,k4}是阻抗函数待标定的参数。
[0020]
作为优选,式中l为路段长度,v
m
为最大速度,v
m
=max(v
d
,v
r
);
[0021]
作为优选,步骤(3)中,根据所述初始交通流数据集合,运用最小二乘方法,标定阻抗函数的参数。
[0022]
作为优选,步骤(5)中,根据步骤(1)中所述路段实际交通信息,利用交通仿真系统对该路段交通流进行模拟仿真,预测该路段在不同模拟交通需求下的运行状态,统计对应模拟平均车速和模拟行程时间。将某一交通需求下的模拟平均车速和模拟平均行程时间记作一条数据,模拟交通流数据集合d0={d1,d2,
…
,d
i
,
…
,d
m
‑1,d
m
},第i条数据d
i
={v
i
,q
i
,t
i
},q
i
为第i种模拟交通需求,v
i
和t
i
分别为q
i
对应的模拟平均车速和模拟行程时间,i=1,2,
…
,m,m为模拟交通流数据量,
[0023]
作为优选,为保证样本的多样性和体现交通仿真模拟优势,要求模拟交通需求与实际交通流量无重合,即q0为步骤(1)中获取的路段实际交通信息中所有交通流量的集合,q0={q1,q2,
……
,q
n
‑1,q
n
}。
[0024]
作为优选,步骤(9)中,所述误差的平均值,其计算方法如下:
[0025][0026]
式中r为误差的平均值,t
i
为模拟行程时间,t
th,i
为基于第i种模拟交通需求确定的理论行程时间。
[0027]
有益效果:本发明公开了一种基于交通仿真的路段阻抗函数校正方法,弥补交通观测中数据量缺乏的不足,基于路段实际交通信息与交通仿真系统产生的模拟交通信息,
检验并校正阻抗函数参数,完成阻抗函数的校正工作,提高阻抗函数的准确性和适应性,为交通分配提供更科学合理的模型基础。
附图说明
[0028]
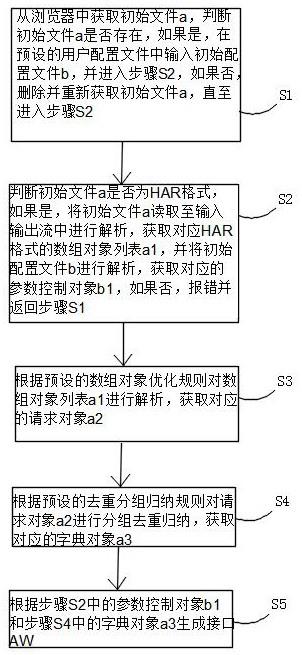
图1是本发明实施例的方法流程图。
具体实施方式
[0029]
现有方法是采用有限的实测数据,对阻抗函数进行标定,且未同时考虑流量和速度,而本发明在综合考虑流量和速度的同时,利用有限的实测数据和仿真模拟数据,能够更为准确地确定路段阻抗。此外,基于实测数据和仿真模拟数据的方法,摆脱了数据限制,极大程度地提高阻抗函数模型的适应性,能够根据具体场景而确定针对性的阻抗模型。
[0030]
阻抗函数是交通分配和网络分析的基础,路段阻抗的大小,决定着路网中选择该路段作为路径的车辆比例。阻抗大,则交通分配的车辆少,阻抗小,则车辆多。因此,科学合理的阻抗模型直接关系交通分配的准确度。
[0031]
为了使本发明的内容更容易被清楚的理解,下面结合附图和具体实施例对本发明作进一步详细的说明。
[0032]
在一个实施例中,如图1所示,提供了一种基于交通仿真的路段阻抗函数校正方法,包括如下步骤:
[0033]
(1)获取路段实际交通信息,将将平均车速、交通流量、平均行程时间标记为初始交通流数据集合;
[0034]
(2)确定路段阻抗函数形式与其待标定的参数;
[0035]
(3)根据所述初始数据集合,标定阻抗函数中的参数;
[0036]
(4)将步骤(3)中标定的参数标记为新一代参数集合;
[0037]
(4)根据所述路段实际交通信息,利用交通仿真系统对该路段交通流进行模拟仿真,预测该路段在不同模拟交通需求下的运行状态,并统计对应模拟平均车速和模拟行程时间;
[0038]
(6)标记步骤(4)中所述模拟交通需求、模拟平均车速和模拟行程时间为模拟交通流数据集合;
[0039]
(7)将所述模拟交通需求、模拟平均车速和标定完成的参数代入阻抗函数,得到的路段阻抗即为理论行程时间;
[0040]
(8)计算不同模拟交通需求下模拟行程时间与对应理论行程时间之间的误差;
[0041]
(9)若步骤(8)所述误差的平均值大于预设阈值,则将所述初始数据集合与所述模拟数据集合合并为新一代数据集合,并返回步骤(3)执行参数的标定;否则,将所述新一代参数集合作为最终方案,得到完成参数标定的阻抗函数,结束校正过程。
[0042]
在一个实施例中,提供了一种考虑智能车队的道路阻抗函数计算装置,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述基于交通仿真的路段阻抗函数校正方法的步骤。
[0043]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述基于交通仿真的路段阻抗函数校正方法的步骤。
[0044]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0045]
交通示例:
[0046]
某一双车道的路段长6km,每车道宽3.5m,限速80km/h,该路段通行能力为每小时通过2000辆车。获取某一天0:00~24:00的交通数据,统计得到每小时内的平均车速、交通流量和平均行程时间,共计24组数据,按表1所示形式汇总:
[0047]
表1平均车速、交通流量和平均行程时间汇总
[0048]
序号平均车速交通流量平均行程时间1v1q1t12v2q2t2…………
23v
23
q
23
t
23
24v
24
q
24
t
24
[0049]
以下将采用本发明提出的一种基于交通仿真的路段阻抗函数校正方法:
[0050]
(1)获取路段实际交通信息
[0051]
该路段车道数为2,长度l=6km,每车道宽3.5m,限速v
d
=80km/h;
[0052]
将每个小时内获取的平均车速v
i
、交通流量q
i
、平均行程时间t
i
记作一条数据d
i
,={v
i
,q
i
,t
i
};所有交通流量集合为q0,q0={q1,q2,
……
,q
n
‑1,q
n
};所有数据的集合记作初始交通流数据集合d0,d0={d1,d2,
……
,d
n
‑1,d
n
},其中n为实际数据量,n=24。
[0053]
(2)确定路段阻抗函数形式与待标定参数
[0054][0055]
式中t
a
为实际通过该路段所需要的时间,t
f
为路段自由行驶时间,q为交通流量,c为该路段通行能力,为2000veh/h,v
d
为该路段限速,为80km/h,v
r
为该路段平均车速,{k1,k2,k3,k4}是阻抗函数待标定的参数,其中
[0056]
[0057]
式中l为路段长度,v
m
为最大速度,v
m
=max(v
d
,v
r
)。
[0058]
(3)根据所述初始交通流数据集合,运用最小二乘方法,标定阻抗函数参数{k1,k2,k3,k4}。
[0059]
(4)标记所述阻抗函数参数{k1,k2,k3,k4}为新一代参数集合。
[0060]
(5)根据所述路段实际交通信息,利用交通仿真系统对该路段交通流进行模拟仿真,预测该路段在不同模拟交通需求q
i
下的运行状态,统计对应模拟平均车速v
i
和模拟行程时间t
i
。为保证样本的多样性和体现交通仿真模拟优势,要求模拟交通需求与实际交通流量无重合,即
[0061]
模拟交通信息汇总如表2:
[0062]
表2模拟交通信息汇总
[0063]
序号平均车速交通流量平均行程时间1v1q1t12v2q2t2…………
9v9q9t910v
10
q
10
t
10
[0064]
其中q0={q1,q2,
……
,q9,q
10
};
[0065]
(6)标记所述模拟交通需求、模拟平均车速和模拟行程时间为模拟交通流数据集合。
[0066]
将某一交通需求q
i
下的模拟平均车速v
i
和模拟平均行程时间t
i
记作一条数据d
i
,即d
i
={v
i
,q
i
,t
i
};所有数据的集合记作初始数据集合d0,d0={d1,d2,
……
,d
m
‑1,d
m
},其中m为模拟数据量,m=10;
[0067]
(7)根据所述模拟交通需求和已标定的阻抗函数,确定理论行程时间。
[0068]
将(v1,q1)、(v2,q2)、
……
、(v
10
,q
10
)分别代入公式中,计算得到10组理论行程时间{t
th,1
,t
th,2
,
……
,t
th,9
,t
th,10
}。
[0069]
(8)计算模拟行程时间与理论行程时间误差的平均值:
[0070][0071]
(9)模拟行程时间与理论行程时间的误差的平均值阈值为10%,若所述平均误差大于该预设阈值,则将所述初始交通流数据集合d0与所述模拟交通流数据集合d0合并为新一代数据集合,并返回执行标定阻抗函数参数;否则,将所述新一代参数{k1,k2,k3,k4}作为最终方案,得到完成参数标定的阻抗函数,结束校正过程。
[0072]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或
变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。