技术特征:
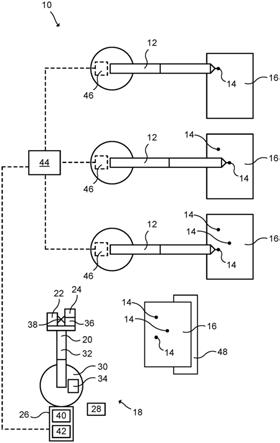
1.一种检测在工件(16)上的测试物体(14)的位置异常的方法,所述方法包括:捕获所述测试物体(14)的图像,以获得图像数据;基于所述图像数据,确定所述测试物体(14)相对于所述测试机器人(20)的真实位置;基于所述真实位置,移动由所述测试机器人(20)承载的测试传感器(24),以与所述测试物体(14)接触;当所述测试传感器(24)与所述测试物体(14)接触时,借助于所述测试传感器(24)获取所述测试物体(14)的测试数据;以及基于测试物体位置和参考位置之间的比较,检测所述测试物体(14)的位置异常,所述测试物体位置基于所述真实位置、基于所述测试数据和/或基于当所述测试传感器(24)与所述测试物体(14)接触时的所述测试机器人(20)的位置。2.根据权利要求1所述的方法,其中所述参考位置为基于在不同工件上的对应测试物体的多个测试物体位置确定的平均测试物体位置。3.根据权利要求1所述的方法,其中所述参考位置是名义位置。4.根据前述权利要求中任一项所述的方法,还包括:如果所述测试物体位置与所述参考位置的偏差超过阈值,则确定存在所述测试物体(14)的位置异常。5.根据前述权利要求中任一项所述的方法,还包括:借助于机器学习以确定存在所述测试物体(14)的位置异常。6.根据前述权利要求中任一项所述的方法,其中所述测试机器人(20)包括阻尼器(36),所述阻尼器(36)能够响应于所述测试传感器(24)和所述测试物体(14)之间的接触力而运动,并且其中所述测试物体位置是基于当所述测试传感器(24)在所述测试物体(14)上施加预定义接触力时的所述阻尼器(36)的位置。7.根据前述权利要求中任一项所述的方法,其中当所述测试传感器(24)与所述测试物体(14)接触时,所述测试物体位置是基于所述测试机器人(20)的工具中心点(38)的位置。8.根据前述权利要求中任一项所述的方法,其中所述图像数据是借助于由所述测试机器人(20)承载的图像传感器(22)来捕获的。9.一种检测在工件(16)上的测试物体(14)的位置异常的控制系统(26),所述控制系统(26)包括至少一个数据处理设备(40)和至少一个存储器(42),所述至少一个存储器(42)具有存储在其上的计算机程序,所述计算机程序包括程序代码,所述程序代码在由至少一个数据处理设备(40)中的一个或多个数据处理设备执行时使至少一个数据处理设备(40)中的一个或多个数据处理设备执行以下步骤:命令捕获所述测试物体(14)的图像以获得图像数据;基于所述图像数据,确定所述测试物体(14)相对于所述测试机器人(20)的真实位置;命令所述测试机器人(20)基于所述真实位置来移动由所述测试机器人(20)承载的测试传感器(24),以与所述测试物体(14)接触;当所述测试传感器(24)与所述测试物体(14)接触时,命令测试传感器(24)获取所述测试物体(14)的测试数据;以及基于测试物体位置和参考位置之间的比较,检测所述测试物体(14)的位置异常,所述测试物体位置基于所述真实位置、基于所述测试数据和/或基于当所述测试传感器(24)与所述测试物体(14)接触时的所述测试机器人(20)的位置。
10.一种测试系统(18),包括测试机器人(20)、图像传感器(22)、由所述测试机器人(20)承载的测试传感器(24)、以及根据权利要求9所述的控制系统(26)。11.根据权利要求10所述的测试系统(18),其中所述测试机器人(20)包括阻尼器(36),所述阻尼器(36)能够响应于所述测试传感器(24)和所述测试物体之间的接触力而运动,并且其中计算机程序包括程序代码,当由至少一个数据处理设备(40)中的一个或多个数据处理设备执行时,使所述至少一个数据处理设备(40)中的一个或多个数据处理设备基于当所述测试传感器(24)在所述测试物体(14)上施加预定义接触力时的所述阻尼器(36)的位置,以确定所述测试物体位置。12.根据权利要求10或11所述的测试系统(18),其中所述图像传感器(22)由所述测试机器人(20)承载。13.一种机器人系统(10),包括多个焊接机器人(12)以及根据权利要求11或12所述的测试系统(18)。14.一种测试机器人(20),包括:主体(30);能够相对于所述主体(30)运动的臂(32);设置在所述臂(32)上的图像传感器(22);设置在所述臂(32)上的测试传感器(24);以及校准装置(34),包括至少一个参考物体(68,70、72),以借助于所述图像传感器(22)用于图像数据的参考获取,和/或借助于所述测试传感器(24)用于测试数据的参考获取,所述校准装置(34)被固定在所述主体(30)上。15.根据权利要求14所述的测试机器人(20),其中所述至少一个参考物体(68、70、72)包括缺陷参考物体(70)以及批准参考物体(68),所述缺陷参考物体(70)不满足由所述测试传感器(24)获得的测试数据的质量目标,所述批准参考物体(68)满足所述质量目标。16.根据权利要求14或15所述的测试机器人(20),其中所述校准装置(34)包括阻挡结构(74),所述阻挡结构(74)至少部分地围绕所述至少一个参考物体(72)中的一个参考物体,所述阻挡结构(74)被布置为用于校准所述测试传感器(24)的膜(52)。17.一种编程设备(28),用于对具有图像传感器(22)和测试传感器(24)的测试机器人(20)的操作进行编程,所述编程设备(28)包括:显示器(80),被布置为根据所述图像传感器(22)所获取的,以显示在工件(16)上的测试物体(14)的图像数据;其中所述编程设备(28)被配置为:接收与显示在所述显示器(80)上的所述测试物体(14)相关的手动图像输入(92、94),所述手动图像输入借助于所述测试传感器(24)与所述测试物体(14)的非破坏性测试相关联;以及基于所述手动图像输入(92、94),创建以下各项的操作的指令:所述测试机器人(20)、所述图像传感器(22)和/或与所述测试物体(14)的非破坏性测试相关联的所述测试传感器(24)。18.根据权利要求17所述的编程设备(28),其中所述手动图像输入是与在所述显示器(80)上的所述测试物体(14)相邻的边界(92)。
19.根据权利要求17或18所述的编程设备(28),其中所述编程设备(28)被配置为接收参数输入(82),以定义所述测试机器人(20)、所述图像传感器(22)和/或测试传感器(24)的参数,所述参数与在所述显示器(80)上的所述测试物体(14)的非破坏性测试相关联。20.根据权利要求19所述的编程设备(28),其中所述编程设备(28)被配置为基于所述参数输入(82)来命令所述测试机器人(20)的操作的测试执行。21.根据权利要求19或20所述的编程设备(28),其中所述编程设备(28)被配置为基于所述参数输入(82),创建用于以下各项的操作的指令:所述测试机器人(20)、所述图像传感器(22)和/或与所述测试物体(14)的非破坏性测试相关联的所述测试传感器(24)。22.根据权利要求17至21中任一项所述的编程设备(28),其中所述编程设备(28)被配置为在所述显示器(80)上显示的所述图像数据上显示视觉覆盖(96),所述视觉覆盖(96)指示与在所述显示器(80)上的所述测试物体(14)相关联的非破坏性测试设置。23.根据权利要求17至22中任一项所述的编程设备(28),其中所述显示器(80)上的图像数据是实时显示的。24.根据权利要求17至22中任一项所述的编程设备(28),其中所述编程设备(28)是示教单元。
技术总结
一种检测在工件(16)上的测试物体(14)的位置异常的方法,该方法包括捕获测试物体(14)的图像,以获得图像数据;基于图像数据,确定测试物体(14)相对于测试机器人(20)的真实位置;根据真实位置移动测试机器人(20)承载的测试传感器(24),以与测试物体(14)接触;当测试传感器(24)与测试物体(14)接触时,借助于测试传感器(24)获取测试物体(14)的测试数据;以及基于测试物体位置和参考位置之间的比较来检测测试物体(14)的位置异常,测试物体位置是基于真实位置、基于测试数据和/或基于当测试传感器(24)与测试物体(14)接触时的测试机器人(20)的位置。(20)的位置。(20)的位置。
技术研发人员:奥古斯特
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:2020.04.17
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。