1.本发明涉及智能控制领域,尤其涉及一种基于图像识别工作位置的方法、系统,机器人及存储介质。
背景技术:
2.低重复率、高覆盖率是遍历式机器人如吸尘、割草及泳池清洗等移动机器人追求的目标。
3.以移动机器人为智能割草机器人为例,割草机器人以边界围住的草坪为工作区域以进行割草作业,草坪之外定义为非工作区域。
4.现有技术中通常采用埋设边界线的方式对草坪工作区域的边界进行标定,然而这不仅需要花费很多的人力和物力使成本增加,而且布线需要有一定的要求,比如拐角的角度不能小于90度,如此,一定程度上限制了草坪工作区域的形状。
5.因此,需要一种新的方式区分机器人的工作区域和非工作区域。
技术实现要素:
6.为解决上述技术问题,本发明的目的在于提供一种基于图像识别工作位置的方法、系统,机器人及存储介质。
7.为了实现上述发明目的之一,本发明一实施方式提供一种基于图像识别工作位置的方法,所述方法包括:获取原始图像;
8.对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;
9.对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;
10.根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域;
11.通过上述方法利用图像的纹理特征的周期性来辨识工作区域的位置。
12.作为本发明一实施方式的进一步改进,所述对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像,包括:
13.将原始图像转换为灰度图像;
14.对灰度图像进行平滑滤波处理形成去噪图像;
15.采用lbp算法对去噪图像进行特征提取形成纹理特征图像;
16.通过阈值的匹配将纹理特征图像转换为二值化图像;
17.通过上述方法有利于提取纹理特征图像的轮廓。
18.作为本发明一实施方式的进一步改进,所述对二值化图像进行轮廓检测获取二值化图像中的每一轮廓,包括:
19.对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;
20.遍历每一轮廓,计算当前轮廓的尺寸参数之一是否大于预设尺寸参数阈值,若是,
将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;
21.或遍历每一轮廓,计算当前轮廓的所有尺寸参数是否均大于其所对应的预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;
22.所述尺寸参数包括:轮廓周长、轮廓面积、轮廓内包含像素点的数量、轮廓的轮廓线上包含像素点的数量中至少其中之一;
23.通过上述方法有利于获取有效轮廓信息。
24.作为本发明一实施方式的进一步改进,所述根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域,包括:
25.按照轮廓集合中各轮廓的排布顺序,以任一轮廓作为基础,依次遍历每一轮廓,根据matchshapes比较作为基础的轮廓和当前遍历到的轮廓之间的hu不变距,若获得的hu不变距小于预设变矩阈值,则将作为基础的轮廓和与基础轮廓的hu不变距小于预设变矩阈值的所有轮廓划分至同一个相似子轮廓集;若以当前作为基础的轮廓获得的hu不变距均不小于预设变矩阈值,则将作为基础的轮廓划分至独立的相似子轮廓集;其中,遍历过程中,已经划分至相似子轮廓集中的轮廓不再重复调用遍历;
26.获取每一相似子轮廓集中轮廓的数量m[k],k为似子轮廓集的序号;
[0027]
判断是否存在至少一个m[k]大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;
[0028]
或判断m[k]中的最大值是否大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;
[0029]
通过上述方法有利于统计周期性来确认工作位置情况。
[0030]
为了实现上述发明目的另一,本发明一实施方式提供一种基于图像识别工作位置的系统,所述系统包括:
[0031]
图像获取模块,用于获取原始图像;
[0032]
图像转换模块,用于对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;
[0033]
解析模块,用于对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0034]
作为本发明一实施方式的进一步改进,所述图像转换模块还用于:
[0035]
将原始图像转换为灰度图像;
[0036]
对灰度图像进行平滑滤波处理形成去噪图像;
[0037]
采用lbp算法对去噪图像进行特征提取形成纹理特征图像;
[0038]
通过阈值的匹配将纹理特征图像转换为二值化图像。
[0039]
作为本发明一实施方式的进一步改进,所述解析模块还用于:
[0040]
对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;遍历每一轮廓,计算当前轮廓的尺寸参数之一是否大于预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;
[0041]
或遍历每一轮廓,计算当前轮廓的所有尺寸参数是否均大于其所对应的预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;
[0042]
所述尺寸参数包括:轮廓周长、轮廓面积、轮廓内包含像素点的数量、轮廓的轮廓线上包含像素点的数量中至少其中之一。
[0043]
作为本发明一实施方式的进一步改进,所述解析模块还用于:
[0044]
按照轮廓集合中各轮廓的排布顺序,以任一轮廓作为基础,依次遍历每一轮廓,根据matchshapes比较作为基础的轮廓和当前遍历到的轮廓之间的hu不变距,若获得的hu不变距小于预设变矩阈值,则将作为基础的轮廓和与基础轮廓的hu不变距小于预设变矩阈值的所有轮廓划分至同一个相似子轮廓集;若以当前作为基础的轮廓获得的hu不变距均不小于预设变矩阈值,则将作为基础的轮廓划分至独立的相似子轮廓集;其中,遍历过程中,已经划分至相似子轮廓集中的轮廓不再重复调用遍历;
[0045]
获取每一相似子轮廓集中轮廓的数量m[k],k为似子轮廓集的序号;判断是否存在至少一个m[k]大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;
[0046]
或判断m[k]中的最大值是否大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域。
[0047]
为了实现上述发明目的之一,本发明一实施方式提供一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上所述基于图像识别工作位置的方法的步骤。
[0048]
为了实现上述发明目的之一,本发明一实施方式提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述基于图像识别工作位置的方法的步骤。
[0049]
与现有技术相比,本发明的基于图像识别工作位置的方法、系统,机器人及存储介质,可通过机器人上摄像机拍摄的图像区分工作区域和非工作区域。
附图说明
[0050]
图1是本发明割草机器人系统的具体示例的结构示意图;
[0051]
图2是本发明第一实施方式提供的基于图像识别工作位置的方法的流程示意图;
[0052]
图3、图4分别是图2中其中一个步骤的具体实现过程的流程示意图;
[0053]
图5a、5b、5c、5d、5e、5f、5g分别是本发明不同示例的示意图;
[0054]
图6是本发明第二实施方式提供的基于图像识别工作位置的方法的流程示意图;
[0055]
图7、图8分别是图6中其中一个步骤的具体实现过程的流程示意图;
[0056]
图9是本发明第三实施方式提供的基于图像识别工作位置的方法的流程示意图;
[0057]
图10、图11、图12分别是图9中其中一个步骤的具体实现过程的流程示意图;
[0058]
图13是本发明提供的基于图像识别工作位置的系统的模块示意图。
具体实施方式
[0059]
以下将结合附图所示的各实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变
换均包含在本发明的保护范围内。
[0060]
本发明的机器人系统可以是割草机器人系统,扫地机器人系统、扫雪机系统、吸叶机系统,高尔夫球场拾球机系统等,各个系统可以自动行走于工作区域并进行相对应的工作,本发明具体示例中,以机器人系统为割草机器人系统为例做具体说明,相应的,所述工作区域可为草坪。
[0061]
如图1所示,本发明的割草机器人系统包括:割草机器人(rm)。
[0062]
所述割草机器人包括:本体10,设置于本体10上的行走单元、图像获取单元及控制单元。所述行走单元包括:主动轮111、被动轮113以及用于驱动主动轮111的电机;所述电机可为带减速箱和带霍尔传感器的无刷电机;电机启动后,可通过减速箱带动主动轮111行走,并通过控制两个轮的速度、方向便可以实现前进与后退直线运行、原地转弯及圆弧运行等行驶动作;所述被动轮113可为万向轮,其通常设置为1个或者2个,其主要起支撑平衡的作用。
[0063]
所述图像获取单元用于在一定范围内获取其视角范围内的场景,在本发明具体实施方式中为摄像机12,该摄像机12安装于本体10的上部,与水平方向成一定夹角,可以拍摄到割草机器人一定范围内的场景;该摄像机12通常拍摄割草机器人前部一定范围内的场景。
[0064]
控制单元为进行图像处理的主控制器13,例如:mcu或dsp等。
[0065]
进一步的,所述割草机器人还包括:用于工作的工作机构,及供电电源14;在本实施例中,工作机构为割草刀盘,用于感应行走机器人的行走状态的各种传感器,例如:倾倒、离地、碰撞传感器、地磁、陀螺仪等,在此未一一具体赘述。
[0066]
如图2所示,本发明第一实施提供的基于图像识别工作位置的方法,所述方法包括以下步骤:
[0067]
a1、获取原始图像;
[0068]
a2、将原始图像转换为二值化图像,所述二值化图像包括零值像素点和非零值像素点;
[0069]
a3、计算二值化图像中每一非零值像素点与其最近的零值像素点之间的距离l
p(x,y)
,(x,y)表示二值化图像中任一非零像素点的坐标,p(x,y)表示二值化图像中的任一非零像素点;统计距离l
p(x,y)
中大于预设距离阈值的数量m;根据数量m的大小确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0070]
本发明具体实施方式中,对于步骤a1,通过割草机器人上安装的摄像机实时拍摄机器人前方的场景,形成原始图像;所述场景为机器人前进方向上的地面图像;进一步的,当所述主控制器接收到原始图像后,对原始图像进行解析;从而可通过原始图像判断机器人获取的机器人拍摄原始图像的工作位置,以下内容中会详细描述。在该具体示例中,原始图像通常为rgb格式的彩色图像;需要说明的是,在不同时刻,摄像机拍摄获得的原始图像大小相同,且为矩形。
[0071]
对于步骤a2,本发明可实现方式中,将rgb格式的原始图像转换为二值化图像的方式具有多种;所述二值化图像为:图像中像素点仅具有两种灰度值,或者为0,或者为255,二值化处理过程为将整个原始图像呈现出明显的黑白效果的过程。
[0072]
本发明较佳实施方式中,结合图3所示,步骤a2具体包括:a21、将原始图像转换为
hsv颜色空间构成的hsv图像;通过阈值的匹配将hsv图像转换为第一二值化图像;分离原始图像,抽取原始图像中的r通道图像,对r通道图像进行平滑滤波处理形成去噪图像;通过阈值的匹配将所述去噪图像转换为第二二值化图像;通过边缘检测算法提取所述去噪图像的边缘形成边缘图像,并对所述边缘图像进行取反形成第三二值化图像;a22、对第一二值化图像、第二二值化图像、第三二值化图像进行取与操作,形成所述二值化图像。
[0073]
需要说明的是,所述第一二值化图像形成过程中,将原始图像转换为hsv颜色空间构成的hsv图像的目的是利于颜色检测;相应的,该步骤也可以将rgb颜色空间转换为his或lab等利于颜色检测的颜色空间,进一步的,对该步骤的获得的图像通过阈值的匹配的方式转换为第一二值化图像。
[0074]
所述阈值匹配的方式即通过阈值范围的设定对各个像素点进行变换,当像素点的值处于阈值范围内,将其像素值调整为0或255,当像素值处于阈值范围外,将其像素值调整为255或0;阈值范围的大小可以根据需要具体调整;若hsv图像中的任一像素对应的h、s、v的数值处于对应的预设阈值范围内,则将其灰度值调整为0或255其中之一,将h、s、v均处于预设范围外的像素的灰度值调整为0或255其中另一;在该具体示例中,对于第一二值化图像的阈值范围设定阶段,优选将草坪颜色(即工作区域)的像素值调整为255,即调整为白色。
[0075]
第二二值化图像形成过程中的所述平滑滤波处理目的是去除图像中的噪声;例如:中值滤波、均值滤波、高斯滤波等。
[0076]
第二二值化图像形成过程中的阈值的匹配可以是固定阈值匹配也可以采用大津阈值法进行匹配。
[0077]
较佳的,所述步骤a2中的第二二值化图像形成过程中,所述方法还包括:对所述第二二值化图像进行膨胀腐蚀处理形成新的第二二值化图像;所述膨胀腐蚀处理为形态学操作,其目的为去除图像中的噪声,相应的,所述步骤a22具体包括:对第一二值化图像、第二二值化图像、第三二值化图像进行取与操作,形成所述二值化图像。
[0078]
第三二值化图像形成过程中,采用的边缘检测方法为canny算法。
[0079]
本发明较佳实施方式中,对于步骤a22,对第一二值化图像、新的第二二值化图像、第三二值化图像进行取与操作,形成所述二值化图像;可以理解的是,因为第一二值化图像、新的第二二值化图像、第三二值化图像的大小相同,且每一像素点的像素值非零即255,如此,取与操作过程中,若3个图像中相同位置的像素点的值均为255,则取与获得的二值化图像中对应位置的像素点的像素值为255;若3个图像中相同位置的像素点的值均为0,则取与获得的二值化图像中对应位置的像素点的像素值为0;其他情况,取与获得的二值化图像中对应位置的像素点的像素值均为0。
[0080]
对于步骤a3,结合图4所示,本发明较佳实施方式中,步骤a3具体包括:计算二值化图像中每一非零值像素点与其最近的零值像素点之间的距离差,统计与其最近的零值像素点之间的距离差大于预设距离阈值的非零像素点的总数量m,所述m为大于零的正整数;判断m是否大于预设数量阈值,若是,确认机器人拍摄原始图像的工作位置为非工作区域;若否,确认机器人拍摄原始图像的工作位置为工作区域。
[0081]
在步骤a3中,所述预设距离阈值为系统预设的表示图像上两个像素点之间距离的数值,其大小可以根据需要具体调节;例如:取值设定为5;当任一非零值像素点与其最近的
零值像素点之间的距离差大于5时,将非零像素点的总数量m的值加1。
[0082]
所示预设数量阈值为一数量固定值,其大小可以根据需要具体调节;例如:取值设定为400,当m大于400时,确认机器人拍摄原始图像的工作位置为非工作区域。
[0083]
本发明较佳实施方式中,对于步骤a3,以二值化图像为基础,在二值化图像按照非零像素点匹配的距离差值的大小形成距离变换图像;在距离变换图像中,距离差越大,其亮度越高;如此,通过观察距离变换图像,可以观察出非零像素点匹配的距离差的大小分布情况。
[0084]
为了便于理解,本发明针对第一实施方式提供的基于图像识别工作位置的方法描述2个具体示例供参考:实施例一和实施例二。
[0085]
结合图5a所示,实施例一从左至右依次为原始图像,二值化图像,距离变换图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;距离变换图像仅显示二值化图像下半部分的变换结果;预设距离阈值为5,预设数量阈值为400;经过计算,m=962>400,如此,可确认机器人拍摄原始图像的工作位置为非工作区域。在该示例中,非零像素点的亮度越高,表示其距离最近的零值像素点的距离差越大,通过观察可知:在该示例中,亮点区域较多,且具有一定的连续性。
[0086]
结合图5b所示,实施例二从左至右依次为原始图像,二值化图像,距离变换图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;距离变换图像仅显示二值化图像下半部分的变换结果;预设距离阈值为5,预设数量阈值为400;经过计算,m=0<400,如此,可确认机器人拍摄原始图像的工作位置为工作区域。在该示例中,非零像素点的亮度越高,表示其距离最近的零值像素点的距离差越大,通过观察可知:在该示例中,亮点离散且比较少。
[0087]
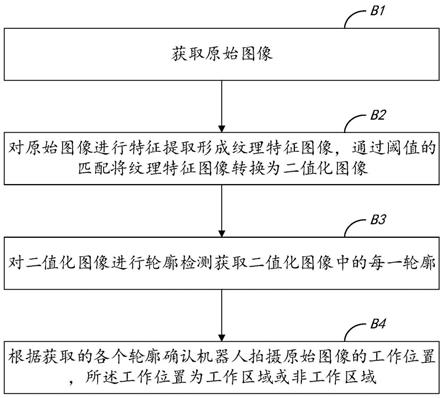
如图6所示,本发明第二实施方式提供的基于图像识别工作位置的方法,所述方法包括:b1、获取原始图像;
[0088]
b2、对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;
[0089]
b3、对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;
[0090]
b4、根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0091]
本发明具体实施方式中,对于步骤b1,通过割草机器人上安装的摄像机实时拍摄机器人前方的场景,形成原始图像;所述场景为机器人前进方向上的地面图像;进一步的,当所述主控制器接收到原始图像后,对原始图像进行解析;从而可通过原始图像判断机器人获取的机器人拍摄原始图像的工作位置,以下内容中会详细描述。在该具体示例中,原始图像通常为rgb格式的彩色图像;需要说明的是,在不同时刻,摄像机拍摄获得的原始图像大小相同,且为矩形。
[0092]
本发明较佳实施方式中,结合图7所示,步骤b2具体包括:b21、将原始图像转换为灰度图像;b22、对灰度图像进行平滑滤波处理形成去噪图像;b23、采用lbp算法对去噪图像进行特征提取形成纹理特征图像;b24、通过阈值的匹配将纹理特征图像转换为二值化图像。
[0093]
需要说明的是,步骤b21,将rgb格式的原始图像转换为灰度图像,将有利于纹理检
测;对于b22,所述平滑滤波处理目的是去除图像中的噪声;例如:中值滤波、均值滤波、高斯滤波等;对于步骤b23,所述lbp算法中的特征算子不仅限于lbp,还包括lbp的改进算子,如clbp、elbp等;对于步骤b24,所述阈值匹配的方式即通过阈值范围的设定对各个像素点进行变换,当像素点的值处于阈值范围内,将其像素值调整为0或255,当像素值处于阈值范围外,将其像素点调整为255或0;阈值范围的大小可以根据需要具体调整;本发明具体示例中,,若纹理特征图像中的任一像素对应的数值处于对应的预设阈值范围内,则将其灰度值调整为0或255其中之一,将处于预设范围外的像素的灰度值调整为0或255其中另一。
[0094]
进一步的,本发明较佳实施方式中,对于步骤b3,所述方法具体包括:b31、对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;b32、遍历每一轮廓,计算当前轮廓的尺寸参数之一是否大于预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;或遍历每一轮廓,计算当前轮廓的所有尺寸参数是否均大于其所对应的预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;所述尺寸参数包括:轮廓周长、轮廓面积、轮廓内包含像素点的数量、轮廓的轮廓线上包含像素点的数量中至少其中之一。
[0095]
以轮廓参数仅包括轮廓的轮廓线上包含像素点的数量为例,相应的,对应设置的尺寸参数阈值表示像素点数量;例如:尺寸参数阈值设置30,当任一轮廓的轮廓线上包含像素点的数量大于30时,将当前轮廓保存在轮廓集合中,当任一轮廓的轮廓线上包含像素点的数量不大于30时,丢弃当前轮廓,即在下一步计算中,不统计当前的轮廓。
[0096]
可以理解的是,当轮廓参数包括多个时,每一个轮廓参数均对应设置一个尺寸参数阈值;另外,计算轮廓集合时,可以一个轮廓参数的计算结果进行统计,也可以结合多个轮廓参数的计算结果进行统计;例如:设置的轮廓参数为三个,相应的,可以在任一轮廓参数的结果大于其预设的尺寸阈值时,将当前轮廓保存在轮廓集合中,也可以在两个轮廓参数的结果均大于其预设的尺寸阈值时,将当前轮廓保存在轮廓集合中,亦可以在所有的轮廓参数的结果均大于其预设的尺寸阈值时,将当前轮廓保存在轮廓集合中,
[0097]
较佳的,结合图8所示,步骤b4具体包括:b41、按照轮廓集合中各轮廓的排布顺序,以任一轮廓作为基础,依次遍历每一轮廓,根据matchshapes比较作为基础的轮廓和当前遍历到的轮廓之间的hu不变距,若获得的hu不变距小于预设变矩阈值,则将作为基础的轮廓和与基础轮廓的hu不变距小于预设变矩阈值的所有轮廓划分至同一个相似子轮廓集;若以当前作为基础的轮廓获得的hu不变距均不小于预设变矩阈值,则将作为基础的轮廓划分至独立的相似子轮廓集;其中,遍历过程中,已经划分至相似子轮廓集中的轮廓不再重复调用遍历;b42、获取每一相似子轮廓集中轮廓的数量m[k],k为相似子轮廓集的序号;判断是否存在至少一个m[k]大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;或判断m[k]中的最大值是否大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域,若否,则确认机器人拍摄原始图像的工作位置为工作区域。
[0098]
在步骤b41中,matchshapes是oppencv提供的根据计算比较两张图像hu不变距的函数,函数返回值代表相似度大小,完全相同的图像返回值是0,返回值最大为1;具体的函数为现有技术,在此不做进一步的赘述;相应的,所述预设变矩阈值为系统预设的比较两个轮廓相似度的hu不变距,其大小可以根据需要具体调节;若两张图像之间的hu不变距小于
预设变矩阈值,则认为两者相似,并将其划分至同一相似子轮廓集中。
[0099]
进一步的,预设数量比较阈值为系统上预设的比较任一相似子轮廓中轮廓数量的数量,其大小可以根据需要具体调节;例如:取值设定为10;若其中一个相似子轮廓集中轮廓的总数量大于10,则间接表示原始图像具有周期性的纹理,可以判定机器人拍摄原始图像的工作位置为非工作区域;反之,则判定机器人拍摄原始图像的工作位置为工作区域。
[0100]
为了便于理解,本发明针对第二实施方式提供的基于图像识别工作位置的方法描述2个具体示例供参考:实施例三和实施例四。
[0101]
结合图5c所示,实施例三从左至右依次为原始图像,纹理特征图像,二值化图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;设定预设数量比较阈值为10;经过计算,二值化图像的各相似子轮廓集中,最多的相似轮廓数量为7个,小于预设数量比较阈值,判定当前图像中无周期性纹理,确定机器人拍摄原始图像的工作位置为工作区域。
[0102]
结合图5d所示,实施例四从左至右依次为原始图像,纹理特征图像,二值化图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;设定预设数量比较阈值为10;经过计算,二值化图像的各相似子轮廓集中,最多的相似轮廓数量为13个,大于预设数量比较阈值,判定当前图像中具有周期性纹理,确定机器人拍摄原始图像的工作位置为非工作区域。
[0103]
结合图9所示,本发明第三实施方式提供的基于图像识别工作位置的方法,所述方法包括:c1、获取原始图像;
[0104]
c2、对原始图像进行特征提取形成纹理特征图像,对所述纹理图像进行傅里叶变换形成频谱图像,通过阈值的匹配将频谱图像转换为二值化图像;
[0105]
c3、根据二值化图像中像素点的位置和像素值确认机器人拍摄原始图像的工作位置,和/或根据根据二值化图像中像素点的位置和具有相同像素值的像素点的总数量确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0106]
本发明具体实施方式中,对于步骤c1,通过割草机器人上安装的摄像机实时拍摄机器人前方的场景,形成原始图像;所述场景为机器人前进方向上的地面图像;进一步的,当所述主控制器接收到原始图像后,对原始图像进行解析;从而可通过原始图像判断机器人获取的机器人拍摄原始图像的工作位置,以下内容中会详细描述。在该具体示例中,原始图像通常为rgb格式的彩色图像;需要说明的是,在不同时刻,摄像机拍摄获得的原始图像大小相同,且为矩形。
[0107]
本发明较佳实施方式中,结合图10所示,步骤c2具体包括:c21、将原始图像转换为灰度图像;c22、对灰度图像进行平滑滤波处理形成去噪图像;c23、采用lbp算法对去噪图像进行特征提取形成纹理特征图像;c24、对所述纹理图像进行傅里叶变换形成频谱图像;c25、通过阈值的匹配将频谱图像转换为二值化图像。
[0108]
需要说明的是,步骤c21,将rgb格式的原始图像转换为灰度图像,将有利于纹理检测;对于c22,所述平滑滤波处理目的是去除图像中的噪声;例如:中值滤波、均值滤波、高斯滤波等;对于步骤c23,所述lbp算法中的特征算子不仅限于lbp,还包括lbp的改进算子,如clbp、elbp等;对于步骤c24,所述频谱图像的原点是原图整幅图像的平均灰度,其频率为0,从原点向外周扩散,其频率越来越高;在频谱图像中,纹理与图像频谱中的高频密切相关,
所以下述步骤中,统计二值化图像中离原点距离大于预设限制阈值的像素点,可以更准确的反应出是否存在纹理特征。对于步骤c25,所述阈值匹配的方式中,阈值的大小可以根据h通道的像素值在色度范围内的像素点个数与图像中总的像素点个数的比值来确定。
[0109]
进一步的,结合图11所示,本发明其中一种实施方式中,步骤c3中根据二值化图像中像素点的位置和像素值确认机器人拍摄原始图像的工作位置具体包括:c31、以二值化图像的中心为原点,遍历整个二值化图像获取距所述原点的距离大于预设限制阈值的像素点;c32、计算获得的距所述原点的距离大于预设限制阈值的像素点的像素值之和是否大于预设像素值阈值,若是,确认机器人拍摄原始图像的工作位置为非工作区域,若否,确认机器人拍摄原始图像的工作位置为工作区域。
[0110]
进一步的,结合图12所示,本发明另一种实施方式中,步骤c3中根据二值化图像中像素点的位置和具有相同像素值的像素点的总数量确认机器人拍摄原始图像的工作位置具体包括:c31'、以二值化图像的中心为原点,遍历整个二值化图像获取距所述原点的距离大于预设限制阈值的非零值像素点;c32'、统计获得的所有非零值像素点的总数量是否大于预设总数量阈值,若是,确认机器人拍摄原始图像的工作位置为非工作区域,若否,确认机器人拍摄原始图像的工作位置为工作区域。
[0111]
所述预设限制阈值为系统上预设的、比较任一像素点与原点之间距离的固定数值,其大小可以根据需要具体调节;例如:取值设置为9;在c31中,当任一像素点与原点的距离大于9时,将其作为下一步骤中统计的像素点;在c31'中,当任一非零像素点与原点的距离大于9时,将其作为下一步骤中统计的像素点。
[0112]
所述预设像素值阈值为系统上预设的比较像素点的像素值和值的固定数值,其大小可以根据需要具体调节;例如:取值设置为510;若通过计算获得的像素点的像素值之和大于510,则间接表示原始图像具有周期性的纹理,可以判定机器人拍摄原始图像的工作位置为非工作区域;反之,则判定机器人拍摄原始图像的工作位置为工作区域。
[0113]
所述预设总数量阈值为系统上预设的比较非零值像素点的数量大小的固定数值,其大小可以根据需要具体调节;例如:取值设置为2;若通过计算获得的非零值像素点的总数量大于2,则间接表示原始图像具有周期性的纹理,可以判定机器人拍摄原始图像的工作位置为非工作区域;反之,则判定机器人拍摄原始图像的工作位置为工作区域。
[0114]
为了便于理解,本发明针对基于图11提供的第三实施方式的基于图像识别工作位置的方法描述3个具体示例供参考:实施例五、实施例六以及实施例七。
[0115]
结合图5e所示,实施例五从左至右依次为原始图像,灰度图像,纹理特征图像,频谱图像,二值化图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;设定预设限制阈值为9,设定预设像素值阈值为510;经过计算,获得的距所述原点的距离大于9的像素点的像素值之和为1530,因1530>510,判定当前图像中具有周期性纹理,确定机器人拍摄原始图像的工作位置为非工作区域。
[0116]
结合图5f所示,实施例六从左至右依次为原始图像,灰度图像,纹理特征图像,频谱图像,二值化图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;设定预设限制阈值为9,设定预设像素值阈值为510;经过计算,获得的距所述原点的距离大于9的像素点的像素值之和为0,因0<510,判定当前图像中无周期性纹理,确定机器人拍摄原始图像的工作位置为工作区域。
[0117]
结合图5g所示,实施例七从左至右依次为原始图像,灰度图像,纹理特征图像,频谱图像,二值化图像;原始图像为rgb格式的彩色图像;二值化图像为黑白颜色二值图像;设定预设限制阈值为9,设定预设像素值阈值为510;经过计算,获得的距所述原点的距离大于9的像素点的像素值之和为1020,因1020>510,判定当前图像中具有周期性纹理,确定机器人拍摄原始图像的工作位置为非工作区域。
[0118]
需要说明的是,上述示例五、六、七的判定过程中,也可以基于图12提供的第三实施方式的基于图像识别工作位置的方法进行判定,在具体实施方式中,预设限制阈值同样设置为9,预设总数量阈值设定为2,其判断过程与上述示例五、六、七的判定过程相似,判定结果相同,在此不做进一步的赘述。
[0119]
本发明一实施方式中,还提供一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一实施方式所述的基于图像识别工作位置的方法的步骤。
[0120]
本发明一实施方式中,还提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一实施方式所述的基于图像识别工作位置的方法的步骤。
[0121]
结合图13所示,提供一种基于图像识别工作位置的系统,所述系统包括:图像获取模块100,图像转换模块200以及解析模块300。
[0122]
对于本发明第一实施方式的基于图像识别工作位置的系统,所述图像获取模块100用于获取原始图像;图像转换模块200用于将原始图像转换为二值化图像,所述二值化图像包括零值像素点和非零值像素点;解析模块300根据二值化图像中每一非零值像素点与其最近的零值像素点之间的距离差确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0123]
进一步的,第一实施方式的基于图像识别工作位置的系统中的所述图像获取模块100用于实现步骤a1;图像转换模块200用于实现步骤a2;解析模块300用于实现步骤a3;所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统的具体工作过程,可以参考前述方法实施方式中的对应过程,在此不再赘述。
[0124]
对于本发明第二实施方式的基于图像识别工作位置的系统,所述图像获取模块100用于获取原始图像;图像转换模块200用于对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;解析模块300用于对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0125]
进一步的,第二实施方式的基于图像识别工作位置的系统中的所述图像获取模块100用于实现步骤b1;图像转换模块200用于实现步骤b2;解析模块300用于实现步骤b3和b4;所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统的具体工作过程,可以参考前述方法实施方式中的对应过程,在此不再赘述。
[0126]
对于本发明第三实施方式的基于图像识别工作位置的系统,所述图像获取模块100用于获取原始图像;图像转换模块200用于对原始图像进行特征提取形成纹理特征图像,对所述纹理图像进行傅里叶变换形成频谱图像,通过阈值的匹配将频谱图像转换为二值化图像;解析模块300用于根据二值化图像中像素点的位置和像素值确认机器人拍摄原
始图像的工作位置,和/或根据根据二值化图像中像素点的位置和具有相同像素值的像素点的总数量确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。
[0127]
进一步的,第三实施方式的基于图像识别工作位置的系统中的所述图像获取模块100用于实现步骤c1;图像转换模块200用于实现步骤c2;解析模块300用于实现步骤c3;所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统的具体工作过程,可以参考前述方法实施方式中的对应过程,在此不再赘述。
[0128]
综上所述,本发明的基于图像识别工作位置的方法、系统,机器人及存储介质,可通过机器人上摄像机拍摄的图像区分工作区域和非工作区域。
[0129]
在本技术所提供的几个实施方式中,应该理解到,所揭露的模块,系统和方法,均可以通过其它的方式实现。以上所描述的系统实施方式仅仅是示意性的,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个模块或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
[0130]
所述作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理模块,即可以位于一个地方,或者也可以分布到多个网络模块上,可以根据实际的需要选择其中的部分或者全部模块来实现本实施方式方案的目的。
[0131]
另外,在本技术各个实施方式中的各功能模块可以集成在一个处理模块中,也可以是各个模块单独物理存在,也可以2个或2个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用硬件加软件功能模块的形式实现。
[0132]
最后应说明的是:以上实施方式仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施方式对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施方式技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。