技术特征:
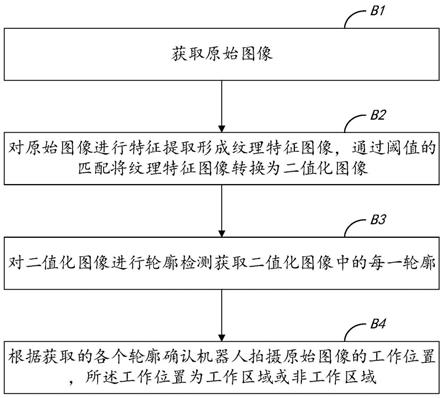
1.一种基于图像识别工作位置的方法,其特征在于,所述方法包括:获取原始图像;对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。2.根据权利要求1所述的基于图像识别工作位置的方法,其特征在于,所述对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像,包括:将原始图像转换为灰度图像;对灰度图像进行平滑滤波处理形成去噪图像;采用lbp算法对去噪图像进行特征提取形成纹理特征图像;通过阈值的匹配将纹理特征图像转换为二值化图像。3.根据权利要求1所述的基于图像识别工作位置的方法,其特征在于,所述对二值化图像进行轮廓检测获取二值化图像中的每一轮廓,包括:对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;遍历每一轮廓,计算当前轮廓的尺寸参数之一是否大于预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;或遍历每一轮廓,计算当前轮廓的所有尺寸参数是否均大于其所对应的预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;所述尺寸参数包括:轮廓周长、轮廓面积、轮廓内包含像素点的数量、轮廓的轮廓线上包含像素点的数量中至少其中之一。4.根据权利要求3所述的基于图像识别工作位置的方法,其特征在于,所述根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域,包括:按照轮廓集合中各轮廓的排布顺序,以任一轮廓作为基础,依次遍历每一轮廓,根据matchshapes比较作为基础的轮廓和当前遍历到的轮廓之间的hu不变距,若获得的hu不变距小于预设变矩阈值,则将作为基础的轮廓和与基础轮廓的hu不变距小于预设变矩阈值的所有轮廓划分至同一个相似子轮廓集;若以当前作为基础的轮廓获得的hu不变距均不小于预设变矩阈值,则将作为基础的轮廓划分至独立的相似子轮廓集;其中,遍历过程中,已经划分至相似子轮廓集中的轮廓不再重复调用遍历;获取每一相似子轮廓集中轮廓的数量m[k],k为似子轮廓集的序号;判断是否存在至少一个m[k]大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;或判断m[k]中的最大值是否大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域。5.一种基于图像识别工作位置的系统,其特征在于,所述系统包括:图像获取模块,用于获取原始图像;
图像转换模块,用于对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;解析模块,用于对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域。6.根据权利要求5所述的基于图像识别工作位置的系统,其特征在于,所述图像转换模块还用于:将原始图像转换为灰度图像;对灰度图像进行平滑滤波处理形成去噪图像;采用lbp算法对去噪图像进行特征提取形成纹理特征图像;通过阈值的匹配将纹理特征图像转换为二值化图像。7.根据权利要求5所述的基于图像识别工作位置的系统,其特征在于,所述解析模块还用于:对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;遍历每一轮廓,计算当前轮廓的尺寸参数之一是否大于预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;或遍历每一轮廓,计算当前轮廓的所有尺寸参数是否均大于其所对应的预设尺寸参数阈值,若是,将当前轮廓保存在轮廓集合中,若否,丢弃当前的轮廓;所述尺寸参数包括:轮廓周长、轮廓面积、轮廓内包含像素点的数量、轮廓的轮廓线上包含像素点的数量中至少其中之一。8.根据权利要求7所述的基于图像识别工作位置的系统,其特征在于,所述解析模块还用于:按照轮廓集合中各轮廓的排布顺序,以任一轮廓作为基础,依次遍历每一轮廓,根据matchshapes比较作为基础的轮廓和当前遍历到的轮廓之间的hu不变距,若获得的hu不变距小于预设变矩阈值,则将作为基础的轮廓和与基础轮廓的hu不变距小于预设变矩阈值的所有轮廓划分至同一个相似子轮廓集;若以当前作为基础的轮廓获得的hu不变距均不小于预设变矩阈值,则将作为基础的轮廓划分至独立的相似子轮廓集;其中,遍历过程中,已经划分至相似子轮廓集中的轮廓不再重复调用遍历;获取每一相似子轮廓集中轮廓的数量m[k],k为似子轮廓集的序号;判断是否存在至少一个m[k]大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为非工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域;或判断m[k]中的最大值是否大于预设数量比较阈值,若是,则确认机器人拍摄原始图像的工作位置为工作区域;若否,则确认机器人拍摄原始图像的工作位置为工作区域。9.一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-4中任一项所述基于图像识别工作位置的方法的步骤。10.一种可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-4中任一项所述基于图像识别工作位置的方法的步骤。
技术总结
本发明提供一种基于图像识别工作位置的方法、系统,机器人及存储介质,所述方法包括:获取原始图像;对原始图像进行特征提取形成纹理特征图像,通过阈值的匹配将纹理特征图像转换为二值化图像;对二值化图像进行轮廓检测获取二值化图像中的每一轮廓;根据获取的各个轮廓确认机器人拍摄原始图像的工作位置,所述工作位置为工作区域或非工作区域;本发明可通过机器人上摄像机拍摄的图像区分工作区域和非工作区域。工作区域。工作区域。
技术研发人员:朱绍明 任雪
受保护的技术使用者:苏州科瓴精密机械科技有限公司
技术研发日:2020.06.02
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。