技术特征:
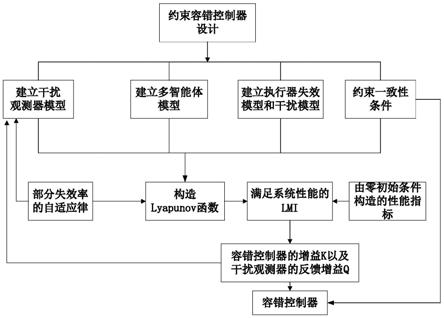
1.基于可切换拓扑的时滞多智能体系统约束容错控制方法,其特征是:该方法包括以下步骤:步骤1,给出带有执行器部分失效故障和外部干扰的多智能体系统的模型,动力学方程建立如下:其中,x
i
(t)∈r
m
代表系统状态变量,d
i
(t)代表的是系统中存在的外部干扰,为系统的控制输入;步骤2,给出多智能执行器的故障模型以及干扰模型;执行器故障模型如下:其中,表示系统中第i个智能体的第s个执行器发生了部分失效故障情况下的输出信号,u
is
(t)表示系统中第i个智能体的第s个执行器的输入信号;ρ(t)代表系统中的部分失效率,ρ
is
(t)表示来自第i个智能体的第s个执行器发生部分失效故障的部分失效率;m代表执行器通道的总个数;代表ρ
is
(t)的上界,ρ
is
代表ρ
is
(t)的下界;我们进一步定义ρ
i
=diag{ρ
i1
,ρ
i2
,...,ρ
im
},由于系统中的部分失效率ρ
i
是未知的,所以我们定义ρ
i
=ρ
0i
(i g
i
)去降低控制器设计中的保守性,其中我们定义ρ(t)=diag{ρ1(t),ρ2(t),...,ρ
m
(t)},根据公式(2)(3)我们可以得到:ρ
i
=ρ
0i
(i g)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中,g=diag{g1,g2,...,g
m
},h=diag{h1,h2,...,h
m
},|g|=diag{|g1|,|g2|,...,|g
m
|},|g|≤h≤i;进一步来说第i个智能体的扰动d
i
(t)∈r
m
,给出系统外部干扰的动态方程可以描述如下:其中,s
i
∈r
m
×
m
是已知的常数矩阵;步骤3,给出多智能体系统干扰观测器的模型干扰观测器模型如下:其中z
i
(t)是干扰观测器的辅助函数,q
i
是干扰观测器的反馈增益,代表外部干扰d
i
(t)的估计值;是对多智能体系统的部分失效率ρ
i
(t)的在线实时估计,为了更好地的实现多智能体系统的一致性,我们采用自适应的方法对智能体的执行器的部分失效率进
行在线实时估计;为了方便书写,将写成为了更好地实现多智能体系统的一致性,我们采用自适应的方法估计执行器的部分失效率,并且将自适应律设计如下:其中μ
s
是正常数;步骤4,建立时滞多智能体系统容错约束一致性控制律给出整个时滞多智能体系统的容错约束一致性控制律其中,a
ij
代表的是智能体之间的信息连通强度,δa
ij
(t)表示智能体i和智能体j之间的通讯不确定性;τ代表的是系统中的常时滞,k代表的是控制器增益,p
x
(x
i
(t))代表的是智能体在规定区域的投影,代表外部干扰d
i
(t)的估计值,其中,将d
i
(t)和写成步骤5、针对步骤1、2、3、4所描述的系统的状态方程以及系统一致性条件和约束条件选择如下合适的lyapunov
‑
krasovskii泛函,将一致性问题和约束条件,转化为系统的稳定性问题,并得到使系统不仅实现约束一致性而且带有h∞性能的充分条件;本发明的设计的李雅普诺夫函数:并采用以下基于初始条件构造的h
∞
性能要求;
其中:z(t)=[z1(t),z2(t),z3(t)]
t
,z1(t)=c1||x(t)
‑
(11
t
/n)x(t)||,z2(t)=c2η(t)
t
,c
j
为实数,j=1,2,3,为实数,j=1,2,3,1
n
代表2.根据权利要求1所述的基于可切换拓扑的时滞多智能体系统约束容错控制方法,其特征是:步骤6,先不考虑不确定拓扑的情况,即δa
ij
=0,由于部分失效率是未知的,基于此设计了如下定理:给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,结合公式(3)(4)使得下面由系统稳定条件以及性能指标得到的线性矩阵不等式成立,则步骤5的时滞多智能体系统可以实现在具有约束条件下以h
∞
干扰水平γ达到容错一致性;到容错一致性;γ2n4‑
i>0,γ2n5‑
i>0,γ2n6‑
i>0,其中:其中:γ=diag{ρ0h,ρ0h,ρ0h,ρ0h,ρ0h,ρ0h},q=diag{q1,q2,...,q
n
},s=diag{s1,s2,...,s
n
},m
22
=
‑
z,l为多智能体系统的拉普拉斯矩阵;
其中,z=diag{z1,z2,...,z
n
},d=diag{d1,d2,...,d
n
},并且d和z都大于0。3.根据权利要求2所述的基于可切换拓扑的时滞多智能体系统约束容错控制方法,其特征是:步骤7,考虑多智能体系统不确定拓扑的情况(δa
ij
≠0),转换成拉普拉斯矩阵的形式我们用δl表示,而δl可以表示为δl=e1σ(t)e2,其中是代表常数矩阵,为具有由拓扑结构对应的图的边和节点索引的行和列的0和1矩阵,|ε|代表图中边的条数,代表的是对角矩阵,其中的对角元素代表边缘的不确定性,即非零矩阵δa
ij
;考虑具有外部干扰以及具有时滞和不确定拓扑的多智能体系统,设计了如下定理,给定适当的参数c
m
,m=1,2,3,若存在合适的矩阵k>0,q
i
,i=1,2,3,...,n,n
j
,j=1,2,3,4和具有恰当维数且正标量ε>0,使得下面的线性矩阵不等式成立,则整个系统在存在通讯时延以及切换拓扑的情况下可以达到具有h
∞
性能指标γ的抗干扰自适应容错约束一致性。性能指标γ的抗干扰自适应容错约束一致性。γ2n2‑
i>0,γ2n4‑
i>0,γ2n5‑
i>0,γ2n6‑
i>0
ꢀꢀꢀꢀꢀꢀꢀ
(14)其中:γ1=diag{ρ0h,ρ0h,ρ0h,ρ0h,ρ0h,ρ0h},γ2=ρ0(i h)diag{e1,e1,e1,e1,e1,e1},上式中中包含的各个元素如下:其中
s=diag{s1,s2,...,s
n
},q=diag{q1,q2,...,q
n
},},4.根据权利要求3所述的基于可切换拓扑的时滞多智能体系统约束容错控制方法,其特征是:对时滞多智能体系统在发生执行器故障、存在约束条件、拓扑结构改变以及扰动干扰的情况下进行了一致性控制,使得系统具有h
∞
性能。
技术总结
本发明涉及基于可切换拓扑的时滞多智能体系统约束容错控制方法。本发明先对智能体系统和执行器部分失效故障模型进行了描述。其次,对多智能体系统进行扩维,设计干扰观测器以估计系统中存在的干扰,并采用自适应的方法在线实时估计执行器的部分失效率,基于多智能体系统的容错约束一致性的要求、干扰以及自适应律,建立Lyapunov函数,利用新的性能指标代替零初始条件以实现H
技术研发人员:李建宁 张帆 刘晓 缪坤忠 陈扬杰 王康宇
受保护的技术使用者:杭州电子科技大学
技术研发日:2021.09.06
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。