1.本发明属于半导体加工技术领域,尤其涉及一种半导体晶圆集成加工装置及其方法。
背景技术:
2.氮化镓是第三代半导体,其禁带宽度大、热导率高、击穿电场高、饱和电子迁移速率大,而且化学性质十分稳定,常温下耐酸碱腐蚀能力强,在激光器件、功率器件和射频器件领域有巨大应用潜力。目前,氮化镓及其相关半导体材料已成为研究热点。
3.在单晶氮化镓衬底的后段应用中,客户对于单晶of边的晶面方向有极高要求,角度偏差普遍要求在0.15
°
以内,因此单晶氮化镓of边的准确定向显得十分重要。将单晶氮化镓材料应用于器件需经过一定工艺制程,基本流程包括外延生长、倒角、研磨和抛光等步骤。现有技术中,of边倒角、定位、切割均为独立工序,需要不同的设备,半导体晶圆转移需要各种工装夹具的配合,效率较低,且难以进一步提升of边的最终加工精度。
技术实现要素:
4.本发明提供了一种半导体晶圆集成加工装置及其方法,可以解决或者至少部分解决上述技术问题。
5.为达此目的,本发明采用以下技术方案:
6.第一方面,提供了一种半导体晶圆集成加工装置,包括:
7.定位机构,所述定位机构包括用于固定半导体晶圆的基座;
8.加工机构,用于对半导体晶圆进行倒角和切割;
9.旋转机构,所述旋转机构连接所述基座,用于驱动所述基座旋转;
10.晶向测量机构,用于所述基座旋转时对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度;其中,所述加工机构根据所述切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
11.可选地,所述加工机构为集成倒角功能和切割功能于一体的独立机构,或者所述加工机构包括相互独立的倒角单元和切割单元,所述倒角单元用于对半导体晶圆进行倒角,所述切割单元用于根据所述切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
12.可选地,所述基座与半导体晶圆之间具有粘接剂,半导体晶圆通过所述粘接剂紧密贴合在所述基座上,或者所述基座内置有真空吸附单元,半导体晶圆通过所述真空吸附单元紧密贴合在所述基座上。
13.可选地,所述定位机构还包括用于固定所述基座的锁定机构。
14.可选地,所述锁定机构为夹具,所述夹具具体包括:
15.两个相对设置的夹爪,所述基座设置在两个夹爪之间,所述夹爪上开设有用于夹持固定所述基座的限位槽;
16.滑轨,至少一个所述夹爪与所述滑轨滑动连接,其滑动方向与两个夹爪之间的连
线方向相同。
17.可选地,所述加工机构或者所述倒角单元包括刀具和能够驱动所述刀具在六个自由度运动的驱动组件。
18.可选地,所述旋转机构包括减速电机、旋转盘和角度检测机构,所述基座固定在所述旋转盘上,所述减速电机用于驱动所述旋转盘旋转,所述角度检测机构用于检测所述基座的旋转角度。
19.可选地,所述晶向测量机构为x射线晶体定向仪。
20.第二方面,提供了一种半导体晶圆集成加工方法,包括:
21.将半导体晶圆固定在定位机构上,所述定位机构包括用于固定半导体晶圆的基座;
22.加工机构对半导体晶圆进行倒角;
23.旋转机构转动所述基座,同时晶向测量机构对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度;
24.所述加工机构根据所述切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
25.可选地,所述加工机构为集成倒角功能和切割功能于一体的独立机构,或者所述加工机构包括相互独立的倒角单元和切割单元,所述倒角单元用于对半导体晶圆进行倒角,所述切割单元用于根据所述切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
26.可选地,所述旋转机构转动所述基座,同时晶向测量机构对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度,包括:
27.所述旋转机构以第一转速转动所述基座,使半导体晶圆的旋转角度大于等于第一预设角度,同时所述晶向测量机构确定晶圆切割角度的初步计算值;所述第一预设角度等于360
°
除以半导体晶圆的晶面数量;
28.以所述初步计算值为基准,所述旋转机构以第二转速转动所述基座,使半导体晶圆在偏离该基准第二预设角度的范围内转动,同时所述晶向测量机构确定所述切割角度的最终计算值;其中,所述第一转速大于所述第二转速。
29.可选地,所述半导体晶圆在偏离该基准第二预设角度的范围内转动,包括:
30.半导体晶圆从正向偏离该基准第二预设角度的位置转动至反向偏离该基准第二预设角度的位置。
31.可选地,所述第二预设角度为1~5
°
。
32.与现有技术相比,本发明实施例具有以下有益效果:
33.本发明实施例提供的一种半导体晶圆集成加工装置及其方法,集成了倒角、定位和切割三种功能于一体,半导体晶圆进行of边加工时无需在多个设备之间进行转移,实现原位加工,避免转移所导致的精度下降,可以有效提升定向切割的精度,缩小角度误差,解决现有技术中因设备条件限制造成的of边加工角度误差过大的问题。具体地,先将半导体晶圆固定在基座上,实现定位,然后通过加工机构进行倒角,去除其边缘毛糙,实现倒角;再然后在旋转机构转动基座时,利用晶向测量机构确定晶圆指定晶面的切割角度,获得的晶圆of边切割角度的精度更高,最后加工机构根据晶圆of边切割角度,对半导体晶圆进行切割,实现定向切割,完成整个加工过程。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
35.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容所能涵盖的范围内。
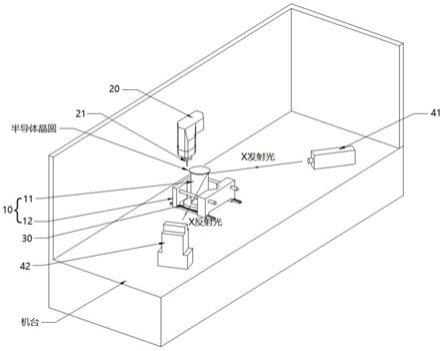
36.图1为本发明实施例提供的半导体晶圆集成加工装置的结构图;
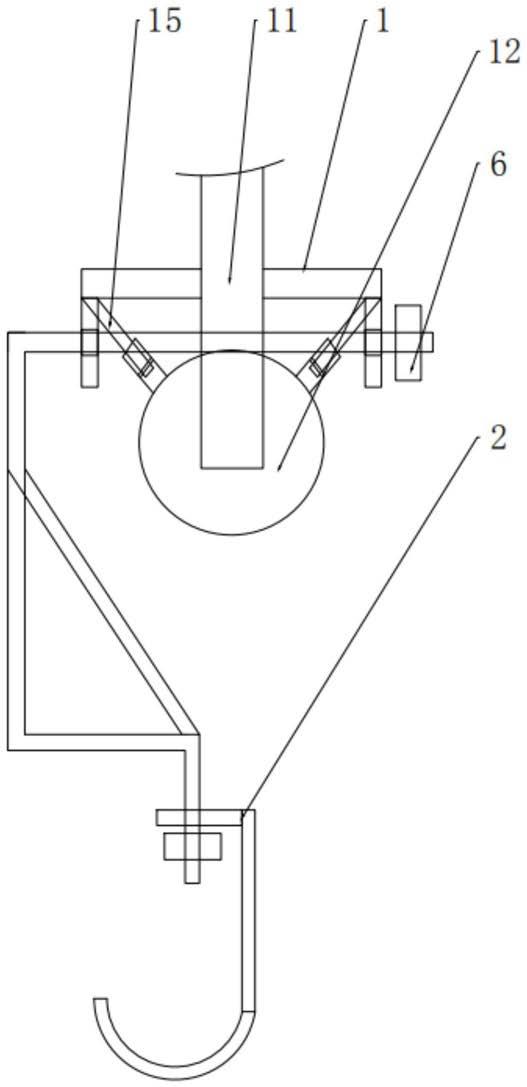
37.图2为本发明实施例提供的定位机构的结构图;
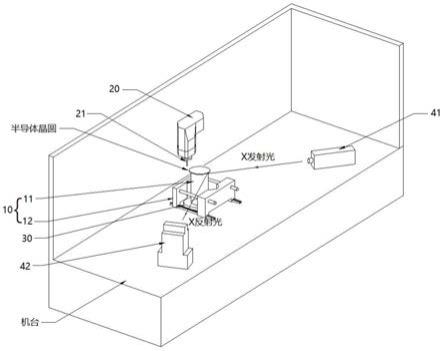
38.图3为本发明实施例提供的半导体晶圆集成加工装置的另一结构图。
39.图示说明:
40.10、定位机构;11、基座;12、夹具;121、限位槽;122、紧固件;123、滑轨;124、夹爪;20、加工机构;21、刀具;30、旋转机构;41、发射器;42、接收器;50、切割单元;51、倒角单元。
具体实施方式
41.为使得本发明的目的、特征、优点能够更加的明显和易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本发明一部分实施例,而非全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
42.请参阅图1和图2所示。
43.本实施例提供了一种半导体晶圆集成加工装置,包括:
44.定位机构10,定位机构10包括用于固定半导体晶圆的基座11;
45.加工机构20,用于对半导体晶圆进行倒角和切割;
46.旋转机构30,旋转机构30连接基座11,用于驱动基座11旋转;
47.晶向测量机构,用于基座11旋转时对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度。
48.其中,加工机构20用于根据晶圆切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
49.与现有技术相比,本实施例集成了定位、倒角和定向切割三种功能于一体,半导体晶圆进行of边加工时无需在多个设备之间进行转移,实现原位加工,避免转移所导致的精度下降,可以有效提升定向切割的精度,缩小角度误差。
50.具体地,定位机构10设置在机台上,定位机构10包括用于固定半导体晶圆的基座11,旋转机构30设置在基座11的下方,加工机构20设置在基座11的上方,晶向测量机构设置在基座11的侧方。
51.半导体晶圆可以通过粘接剂紧密贴合于基座11上。例如,粘接剂可以是石蜡、松香或者快干胶。基座11也可以内置有真空吸附单元,半导体晶圆可以通过真空吸附单元真空
吸附于基座11上。
52.为了防止粘接贴合或者吸附贴合错位,可以使用标准件进行对齐,如标准卡槽等,使基座11和半导体晶圆边缘平齐或者同轴心。基座11以及标准件可以是金属制品、特氟龙制品或者陶瓷制品。
53.进一步地,定位机构10还包括用于固定基座11的锁定机构,锁定机构为夹具12,夹具12具体包括:
54.两个相对设置的夹爪124,基座11设置在两个夹爪124之间,夹爪124上开设有用于夹持固定基座11的限位槽121;
55.滑轨123,至少一个夹爪124与滑轨123滑动连接,其滑动方向与两个夹爪124之间的连线方向相同。
56.当夹爪124在滑轨123上滑动时,可以改变两个夹爪124之间的距离,实现对基座11的固定和解除固定,从而可以避免在各工序加工时,基座11和半导体晶圆晃动,提高稳定性。还可以通过紧固件122进一步(如螺栓)固定住两个夹爪124。
57.该加工机构20包括刀具21和能够驱动刀具21在六个自由度运动的驱动组件。六个自由度可以理解为:三个轴方向以及分别绕三轴旋转的方向,三轴可以指一个直角坐标系的三个轴,如常用的xyz直角坐标系中的x、y和z轴。
58.因此,该加工机构20通过驱动组件驱动刀具21在六个自由度运动,使刀具21作出进刀和退刀动作,可以实现对半导体晶圆倒角,去除边缘毛糙。当然,刀具21还可以通过六个自由度运动实现对半导体晶圆进行切割。
59.旋转机构30包括减速电机、旋转盘和角度检测机构,基座11可拆卸地固定连接旋转盘,减速电机用于驱动旋转盘旋转。减速电机可以调整旋转盘的转速。通过角度检测机构,可以获得基座11的旋转角度。
60.本实施例中,晶向测量机构为x射线晶体定向仪,利用x射线衍射原理,进行晶圆切割角度测量,具体包括能够发出x光的发射器41以及能够接收反射的x光的接收器42。
61.因此,在旋转机构30驱动基座11转动时,可以同时使用晶向测量机构对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度。然后,加工机构20可以根据晶圆切割角度对半导体晶圆进行切割,从而完成加工。
62.更进一步地,本实施例还提供了一种半导体晶圆集成加工方法,包括以下步骤:
63.s1、将半导体晶圆固定在定位机构10的基座11上,夹具12固定基座11;
64.s2、加工机构20对半导体晶圆进行倒角;
65.s3、夹具12松开基座11;
66.s4、旋转机构30转动基座11,同时晶向测量机构对半导体晶圆进行晶向测量,以确定晶圆指定晶面的切割角度;
67.s5、夹具12锁定基座11,加工机构20根据晶圆切割角度,对半导体晶圆进行切割以形成指定晶面的of边。
68.本实施例提供的一种半导体晶圆集成加工方法,先将半导体晶圆固定在基座11上,然后用夹具12固定基座11,实现定位,然后通过加工机构20进行倒角,去除其边缘毛糙,实现倒角;再然后可以松开夹具12,在旋转机构30转动基座11时,利用晶向测量机构确定晶圆指定晶面的切割角度,获得的晶圆of边切割角度的精度更高,最后加工机构20根据晶圆
of边切割角度,对半导体晶圆进行切割,实现定向切割,完成整个加工过程。本实施例提供的一种半导体晶圆集成加工方法,可以解决现有技术中因设备条件限制及加工粗糙造成的切割角度误差过大的问题。
69.进一步地,为了提高加工效率,步骤s4包括:
70.s41、旋转机构30以第一转速转动基座11,使半导体晶圆的旋转角度大于等于第一预设角度,同时晶向测量机构确定晶圆切割角度的初步计算值;第一预设角度等于360
°
除以半导体晶圆的晶面数量;例如,晶圆结构为六边形,第一预设角度就等于60
°
,旋转角度大于等于60
°
,即能够找到该面的特定切割方向;
71.s42、以初步计算值为基准,旋转机构30以第二转速转动基座11,使半导体晶圆在偏离该基准第二预设角度的范围内转动,同时晶向测量机构确定晶圆切割角度的最终计算值;
72.其中,第一转速大于第二转速。
73.本实施例提供的一种半导体晶圆集成加工方法,通过两次旋转实现晶向测量,可以极大地缩减晶向测量的耗时,从而提高整体加工效率。
74.作为一种可选实施方式,在步骤s42中,半导体晶圆以第二转速旋转时,其从正向偏离该基准第二预设角度的位置转动至反向偏离该基准第二预设角度的位置,例如为顺时针旋转。
75.应当理解,半导体晶圆也可以从负向偏离该基准第二预设角度的位置转动至正向偏离该基准第二预设角度的位置,例如为逆时针旋转。
76.本实施例中,第二预设角度为1~5
°
。
77.因此,当第二预设角度为2
°
时,偏离该基准第二预设角度的范围为
±2°
,第二转速旋转的角度为4
°
。
78.可选地,旋转盘的转速范围为0.002~2转/分钟。第一转速可以为0.3~1转/分钟,第二转速可以为0.03~0.1转/分钟。
79.例如,本实施例中,第一次旋转时,按第一转速旋转60
°
,第一转速为1转/分钟,需要耗时10秒;在进行第二次旋转之前,需要调整位置,调整时可以以大于等于第一转速(如可以是1转/分钟;也可以是2转/分钟,更能节约时间)进行旋转,如按第一转速调整位置,大约耗时2~10秒;第二次旋转时,按第二转速旋转4
°
,第二转速为0.1转/分钟,需要耗时约7秒;计算得总测试时长19~27秒。
80.而现有现有技术中,仅进行一次旋转,按照第二转速旋转60
°
,第二转速为0.1转/分钟,计算得总测试时长100秒。
81.从结果看,采用本实施例的加工方法,可以极大地减少晶向测量时间。
82.需要说明的是,为了实现上述加工方法,加工装置应该还包括控制系统,控制系统可以根据需要分别控制定位机构10(如是自动化装置)、加工机构20、旋转机构30和晶向测量机构工作。
83.综上所述,本实施例提供的半导体晶圆集成加工装置及其方法,可以保证切割定向准确,切边平整,将晶向偏角值大幅减小,满足客户切边精度要求。
84.需要说明的是,加工机构20可以是集成倒角功能和切割功能于一体的独立机构,如图1所示。该加工机构20包括刀具21和能够驱动刀具21在六个自由度运动的驱动组件。通
过驱动组件驱动刀具21在六个自由度运动,可以实现倒角和切割功能。
85.如图3所示,在本技术的另一实施例中,加工机构20还可以是包括相互独立的倒角单元51和切割单元50。因此,倒角单元51包括刀具21和能够驱动刀具21在六个自由度运动的驱动组件。通过驱动组件驱动刀具21在六个自由度运动,可以实现倒角功能。切割单元50用于根据晶圆切割角度,对半导体晶圆进行切割,实现切割功能。
86.应当理解,加工机构20作为集成倒角功能和切割功能于一体的独立机构时,有些特殊切割动作并不能完成。因此,可以通过本实施例提供的加工机构20的切割单元50完成。
87.以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。