1.本文涉及但不限于外科缝合器械技术领域,特别涉及但不限于一种腔镜吻合器及其旋转头。
背景技术:
2.吻合器是手术中使用的替代手工缝合的设备,工作原理是利用钛钉或不锈钢钉对组织进行离断或吻合,类似于订书机。相对于传统的手工缝合,器械缝合有以下优势:缝合快速,操作简便,节省手术时间;一次性使用,避免交叉感染;利用钛钉或不锈钢钉,缝合严密、松紧合适;副作用和手术并发症少等,还使得过去无法切除的肿瘤手术得以病兆切除,很受外科医生的青睐。
3.吻合器的适用范围已涉及到胃肠外科、肝胆外科、胸外科、泌尿外科、妇产科等各个领域,成为医生必不可少的工具之一。用器械代替手工缝合,对于患者具有术中较少出血、较少手术时间、减少由于手工而造成的误差、避免感染、术后功能恢复快等多种优势。
4.目前腔镜专用缝合器,即常见的一次使用直线切割腔镜吻合器。这种缝合器共有六排缝钉,钉匣(或钉仓)中有全新刀片,在缝合钉闭合的同时刀片从中间切断组织,使两边各三排缝钉完成缝合、止血等功能。腹腔镜手术是一门新发展起来的微创方法,是未来手术方法发展的一个必然趋势。目前我国的微创手术比例较低,仍有较大发展空间。
技术实现要素:
5.以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
6.本技术实施例提供了一种腔镜吻合器及其旋转头,腔镜吻合器的旋转头可带动腔镜吻合器的钉仓组件摆动以调整钉仓组件的角度,并可使钉仓组件锁止在适当的角度,提高了腔镜吻合器的使用性能。
7.一种腔镜吻合器的旋转头,用于调节所述腔镜吻合器的钉仓组件的摆动角度;所述旋转头包括控制部件、传动机构和锁止机构,所述控制部件与所述传动机构连接,所述传动机构设置成与所钉仓组件连接,所述控制部件设置成可沿第一方向运动并通过所述传动机构带动所述钉仓组件摆动;
8.所述锁止机构包括锁止部件和锁止配合部件,所述锁止配合部件设置在所述传动机构上,所述控制部件设置成可沿第二方向运动,以带动所述锁止部件和所述锁止配合部件之一运动,使所述锁止部件与所述锁止配合部件锁止配合以锁止所述传动机构,或者使所述锁止部件与所述锁止配合部件分离以释放所述传动机构。
9.一种腔镜吻合器,包括主体和钉仓组件,所述主体包括上述的腔镜吻合器的旋转头,所述旋转头的传动机构与所述钉仓组件连接,所述旋转头设置成可带动所述钉仓组件摆动。
10.本技术实施例提供的腔镜吻合器的旋转头,其控制部件可沿第一方向和第二方向
运动,其中,控制部件沿第一方向运动时可通过传动机构带动钉仓组件摆动,以将钉仓组件调整到合适的角度;控制部件沿第二方向运动时可使锁止部件和锁止配合部件相对运动,以使锁止部件和锁止配合部件锁止,进而将传动机构锁止,使钉仓组件保持在一定的角度状态,或者使锁止部件和锁止配合部件分离,进而将传动机构释放,以便调整钉仓组件的角度。
11.本技术实施例的旋转头,既可以调节钉仓组件的摆动角度,还可以将调整好的钉仓组件锁止在适当的角度,防止钉仓组件发生误摆动,提高了腔镜吻合器的使用性能。
12.本技术实施例的其它特征和优点将在随后的说明书中阐述。
附图说明
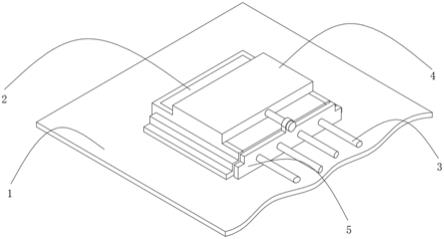
13.图1为根据本技术一实施例的腔镜吻合器的旋转头与钉仓组件的装配结构示意图;
14.图2a
‑
图2c为图1所示的腔镜吻合器的钉仓组件处于不同状态的示意图;
15.图3为图1所示的腔镜吻合器的旋转头与钉仓组件的分解示意图;
16.图4为图1所示的腔镜吻合器的旋转头的分解结构示意图一;
17.图5为图1所示的腔镜吻合器的旋转头的分解结构示意图二;
18.图6为图1所示的腔镜吻合器的旋转头处于锁止状态的结构示意图;
19.图7为图1所示的腔镜吻合器的旋转头处于锁止状态的剖视示意图;
20.图8为图1所示的腔镜吻合器的旋转头处于释放状态的结构示意图;
21.图9为图1所示的腔镜吻合器的旋转头处于释放状态的剖视示意图;
22.图10为图1所示的腔镜吻合器的旋转头的锁止部件的结构示意图;
23.图11为图1所示的腔镜吻合器的旋转头的锁止配合部件的结构示意图;
24.图12为根据本技术另一实施例的腔镜吻合器的旋转头与钉仓组件的装配结构示意图;
25.图13a
‑
图13c为图12所示的腔镜吻合器的钉仓组件处于不同状态的示意图;
26.图14为图12所示的腔镜吻合器的旋转头与钉仓组件的分解示意图;
27.图15为图12所示的腔镜吻合器的旋转头的剖视结构示意图;
28.图16为图12所示的腔镜吻合器的旋转头处于锁止状态的局部结构示意图;
29.图17为图12所示的腔镜吻合器的旋转头处于释放状态的局部结构示意图;
30.图18为一些情况中的腔镜吻合器的旋转头与钉仓组件的分解示意图;
31.图19为图18所示的腔镜吻合器的旋转头的剖视结构示意图。
32.附图标记:
33.100
‑
旋转头,11
‑
控制部件,111
‑
第一控制部件,112
‑
第二控制部件,1121
‑
第一扣合部,113
‑
第一安装槽,121
‑
传动轴,1211
‑
滑槽,1212
‑
第一挡筋,122
‑
传动齿轮,123
‑
传动齿条,125
‑
销钉,126
‑
连杆,131
‑
锁止部件,1311
‑
锁止插齿,1312
‑
第二挡筋,132
‑
锁止配合部件,133
‑
弹性复位件,134
‑
连接块,1341
‑
第二扣合部,1342
‑
第二安装槽,135
‑
旋转块,136
‑
滚珠,14
‑
旋转头外壳,141
‑
上壳,1411
‑
凹槽,142
‑
下壳,143
‑
盖板,200
‑
钉仓组件。
具体实施方式
34.下文中将结合附图对本技术的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
35.一些情况下,腔镜吻合器的旋转头100如图18和图19所示。旋转头100包括:控制部件11、传动机构和旋转头外壳14。
36.控制部件11可为旋钮。
37.传动机构包括传动轴121、传动齿轮122、传动齿条123和连杆126。传动轴121与旋钮(控制部件11)通过销钉125实现同轴且固定地连接,使得旋钮可带动传动轴121转动;传动齿轮122固定安装在传动轴121上,使齿轮可以随传动轴121转动;传动齿条123与传动齿轮122啮合,并通过连杆126与钉仓组件200连接。旋钮转动时,可带动传动轴121及其上的传动齿轮122转动,进而带动传动齿条123平移(如沿图18的左右方向,即纸面的上下方向),传动齿条123通过连杆126带动钉仓组件200进行摆动,以调节钉仓组件200的摆动角度。
38.旋转头外壳14包括上壳141、下壳142和盖板143,上壳141上设有供传动轴121穿过的安装孔,盖板143固定在该安装孔处。
39.传动轴121上固定安装有旋转块135,旋转块135可以随传动轴121转动。旋转块135中装有多个滚珠136和多个弹性复位件133(如弹簧),使得滚珠136可以伸缩。旋转块135设置于上盖的安装孔处,且安装孔的孔壁上开设有凹槽1411。旋转块135上的滚珠136可在弹簧(弹性复位件133)的作用下部分伸入上壳141的凹槽1411中,以便与上壳141的凹槽1411配合形成自锁机构。
40.当手动顺时针转动旋钮时,由于旋钮与传动轴121固定连接,传动轴121也顺时针转动。传动轴121又与旋转块135固定装配连接,旋转块135也同时顺时针转动。由于旋转块135中装有多个滚珠136,滚珠136又与旋转块135中的弹簧相抵,弹簧始终处于压缩状态,滚珠136部分处于上壳141的凹槽1411中。当旋转块135顺时针转动时,滚珠136受上壳141的挤压而径向压缩弹簧,缩进旋转块135中。直到旋转块135旋转到一定角度时,滚珠136与下一个凹槽1411对齐,受弹簧力的作用,滚珠136径向从旋转块135中弹出并伸入上盖的下一个凹槽1411中,形成新的自锁。由于传动轴121与传动齿轮122固定连接,传动轴121转动时,传动齿轮122也同时转动。传动齿轮122又与传动齿条123啮合,传动齿轮122可带动传动齿条123直线运动。传动齿条123与连杆126固定连接装配,传动齿条123可带动连杆126向右(或向左)运动,使钉仓组件200顺时针(或逆时针)摆动。
41.当手动逆时针转动旋钮时,钉仓组件200逆时针(或顺时针)摆动。钉仓组件200的顺时针摆动原理与钉仓组件200的逆时针摆动原理相同。
42.该旋转头100中,利用滚珠136与上壳141的凹槽1411之间的摩擦力,实现自锁。当旋转头100或钉仓组件200受到外力时,该自锁可能失效,造成钉仓组件200的误摆动,影响腔镜吻合器的使用性能。
43.鉴于此,本技术实施例提供了一种腔镜吻合器的旋转头100,可用于调节腔镜吻合器的钉仓组件200的摆动角度,并可将钉仓组件200牢固地锁止在适当的摆动角度,防止钉仓组件200发生误摆动,提高了腔镜吻合器的使用性能。
44.如图1
‑
图3所示,本技术实施例提供了一种腔镜吻合器的旋转头100,包括控制部件11、传动机构和锁止机构,控制部件11与传动机构连接,传动机构设置成与所钉仓组件
200连接,控制部件11设置成可沿第一方向运动并通过传动机构带动钉仓组件200摆动,以调节钉仓组件200的摆动角度,使钉仓组件200可处于图2a
‑
图2c所示的不同状态,提高腔镜吻合器的适用性。
45.锁止机构包括锁止部件131和锁止配合部件132,锁止配合部件132设置在传动机构上,控制部件11设置成可沿第二方向运动,以带动锁止部件131和锁止配合部件132之一运动,使锁止部件131与锁止配合部件132锁止配合(如图6和图7所示)以锁止传动机构,或者使锁止部件131与锁止配合部件132分离(如图8和图9所示)以释放传动机构。
46.旋转头100中,控制部件11一方面通过控制传动机构的运动进而控制钉仓组件200的摆动角度,另一方面,通过控制锁止部件131或锁止配合部件132的运动,实现锁止部件131与锁止配合部件132的锁止配合或分离。如图6和图7所示,当锁止部件131与锁止配合部件132锁止配合时,可将传动机构锁止,使传动机构无法传动、钉仓组件200无法摆动,以将钉仓组件200锁止在适当的摆动角度,防止钉仓组件200发生误摆动;当需要对钉仓组件200进行角度调节时,可使锁止部件131与锁止配合部件132分离,如图8和图9所示,以释放传动机构,此时传动机构可进行传动,控制部件11可通过传动机构来调节钉仓组件200的摆动角度。
47.控制部件11通过第一方向的运动和第二方向的运动分别实现对钉仓组件200的调节和对锁止机构的控制。由于对钉仓组件200的调节和锁止机构的控制是由控制部件11的两个方向的不同运动控制,因此,调节钉仓组件200的摆动角度时,控制部件11需要先进行第二方向的运动实现锁止机构的释放,然后再进行第一方向的运动才能实现钉仓组件200的摆动角度变化,使得锁止机构的锁止可靠,有效地避免了钉仓组件200的误摆动,提高了腔镜吻合器的使用性能。
48.一些示例性实施例中,控制部件11为可旋转且可沿旋转轴线平移的控制钮,控制钮(控制部件11)设置成可沿第一方向进行旋转和平移运动之一,以带动钉仓组件200摆动,且可沿第二方向进行旋转和平移运动之另一,以使锁止部件131与锁止配合部件132锁止配合或分离。
49.控制部件11既可以进行旋转运动,又可以进行平移运动,通过旋转运动和平移运动分别实现对钉仓组件200的调节和对锁止机构的控制。调节钉仓组件200的摆动角度时,控制部件11先进行旋转和平移运动之一,以使锁止部件131与锁止配合部件132分离,此时锁止机构处于释放状态,传动机构能够进行传动操作;然后控制部件11进行旋转和平移运动之另一,控制部件11可带动传动机构动作,传动机构进而带动钉仓组件200摆动,实现摆动角度的调节。当钉仓组件200摆动到合适角度时,控制部件11再次进行旋转和平移运动之一,使锁止部件131与锁止配合部件132锁止配合,此时锁止机构处于锁止状态,将传动机构锁止使传动机构不能进行传动操作,进而将钉仓组件200锁止在该合适的角度。
50.如图4
‑
图9所示,传动机构可包括传动轴121,传动轴121可与控制部件11周向固定连接且可相对控制部件11滑动,控制部件11设置成可旋转并带动传动轴121旋转以使钉仓组件200摆动。
51.锁止配合部件132可周向固定在传动轴121上且可相对传动轴121滑动,锁止部件131和锁止配合部件132之一上可设有锁止插齿,另一个上可设有锁止插槽,控制钮设置成可相对传动轴121滑动并带动锁止配合部件132滑动,使锁止插齿与锁止插槽插接,以将传
动轴121周向固定,或者使锁止插齿与锁止插槽分离,以使传动轴121可转动。
52.锁止机构中,锁止配合部件132可相对传动轴121滑动,锁止部件131固定设置。控制部件11沿传动轴121的轴向方向(即第二方向)平移时,可带动传动轴121上的锁止配合部件132平移,使锁止插齿与锁止插槽的插接配合,锁止配合部件132与锁止部件131锁止并且固定,此时锁止配合部件132不能转动,进而使得与锁止配合部件132周向固定的传动轴121也不能转动,进而导致与传动轴121周向固定的控制部件11也无法转动,使得钉仓组件200的摆动角度无法变化,而锁止在该摆动角度。当控制部件11反向平移时,可带动传动轴121上的锁止配合部件132反向平移,使锁止插齿与锁止插槽分离,此时锁止配合部件132与锁止部件131处于释放状态,此时锁止配合部件132可随传动轴121转动,因此控制部件11沿顺时针或逆时针方向(即第一方向)转动时,传动轴121和锁止配合部件132也随之转动,传动轴121可带动钉仓组件200摆动以调节钉仓组件200的摆动角度。完成钉仓组件200的摆动角度调节后,可使控制部件11平移,使锁止配合部件132与锁止部件131锁止配合,将钉仓组件200的摆动角度锁止。
53.如图5
‑
图9所示,传动轴121与控制部件11可通过销钉125实现同轴且周向固定地连接。其中,控制部件11上可设有第一安装槽113,传动轴121的一端(如图7和图9中的上端)可伸入第一安装槽113内,第一安装槽113的槽壁上可设有供销钉125穿过的圆孔,该圆孔的直径可与销钉125的直径适配。传动轴121上可设有供销钉125穿过的滑槽1211,该滑槽1211可沿销钉125的轴向延伸,且销钉125可在该滑槽1211内滑动,以便控制部件11可相对传动轴121沿传动轴121的轴向方向(如图7和图9中的上下方向)滑动。当然,也可以将滑槽开设在控制部件11上,将与销钉125的直径适配的圆孔开设在传动轴121上。
54.锁止配合部件132可套设在传动轴121上,锁止配合部件132可与传动轴121周向固定,并可沿传动轴121的轴向方向滑动。锁止配合部件132可位于控制部件11的下方,且锁止配合部件132可与控制部件11相抵。控制部件11相对传动轴121向下运动时,控制部件11可带动锁止配合部件132向下运动。传动轴121上可设有第一挡筋1212,以限定锁止配合部件132向下运动的距离。
55.锁止部件131可固定设置,且可位于锁止配合部件132的上方。锁止部件131的下端面上可设有锁止插齿,锁止配合部件132的上端面上可设有锁止插槽。控制部件11可带动锁止配合部件132向下运动时,可使锁止插齿和锁止插槽分离,脱离插接配合。
56.锁止部件131上可设有沿周向均匀分布的多个锁止插齿,锁止配合部件132上可设有沿周向均匀分布的多个锁止插槽。如图6、图8、图10和图11所示,锁止部件131和锁止配合部件132可为端面齿轮,锁止部件131的轮齿可形成锁止插齿,锁止配合部件132的轮齿之间的凹槽可形成锁止插槽。当然,也可以将锁止插齿设置在锁止配合部件132的上端面上,将锁止插槽设置在锁止部件131的下端面上。
57.如图3、图5
‑
图9所示,锁止机构还包括弹性复位件133,弹性复位件133的一端可固定,另一端可与运动的锁止配合部件132相抵,弹性复位件133可设置成使锁止部件131与锁止配合部件132保持锁止配合。
58.弹性复位件133的设置,使得锁止部件131与锁止配合部件132自动保持锁止配合,即使锁止机构自动保持在锁止状态,有利于防止钉仓组件200的误摆动。
59.如图3、图5
‑
图9所示,弹性复位件133可为弹簧(如扁弹簧或压簧等),弹簧套设在
传动轴121上,弹簧的下端可固定设置,上端可与锁止配合部件132相抵,且弹簧可处于压缩状态,可对锁止配合部件132施加向上的弹力。当然,弹性复位件133不限于弹簧,还可以为其他具有弹性的部件。
60.沿图8和图9所示的向下的箭头方向,向下轴向按压控制部件11时,控制部件11会向下轴向推动锁止配合部件132,使锁止配合部件132向下移动,锁止配合部件132可使弹簧发生进一步的压缩。锁止配合部件132向下移动,使锁止插齿与锁止插槽分离,此时锁止配合部件132可进行转动。保持按压控制部件11的同时,沿图8中的曲线箭头所示的方向旋转控制部件11,控制部件11可带动传动轴121转动,传动轴121可带动锁止配合部件132、以及传动机构的安装在传动轴121上的其他部件(如下文提及的传动齿轮122等)转动,进而带动钉仓组件200发生摆动。钉仓组件200摆动到合适的角度后,松开控制部件11,在弹簧的弹力作用下,锁止配合部件132向上运动,并自动复位至与锁止部件131处于锁止配合的状态(如图5和图6所示),控制部件11也向上自动复位。
61.通过一个控制部件11分别进行旋转和平移运动,即实现了对钉仓组件200的摆动角度的调节和对钉仓组件200的锁止,在保证钉仓组件200的锁止牢固的前提下,简化了旋转头100的结构以及调节、锁止钉仓组件200的操作。
62.图1
‑
图9所示的旋转头100中,按压控制部件11进行锁止配合部件132和锁止部件131的分离,利用弹性复位件133使锁止配合部件132和锁止部件131自动锁止,旋转控制部件11进行钉仓组件200的摆动角度的调节。当然,也可以设置成拔出控制部件11进行锁止配合部件132和锁止部件131的分离;或者,旋转控制部件11进行锁止配合部件132和锁止部件131的分离,按压、拔出控制部件11进行钉仓组件200的摆动角度的调节。或者,也可以不设置弹性复位件133,而是通过分别按压和拔出控制部件11,或者通过顺时针和逆时针旋转控制部件11,实现锁止机构的锁止状态与释放状态的切换。
63.如图3、图5、图6和图8所示,传动机构还可包括传动齿轮122、传动齿条123和连杆126,传动齿轮122可安装在传动轴121上,传动齿轮122可与传动齿条123相啮合,传动齿条123可与连杆126连接,连杆126可与钉仓组件200连接。其中,传动齿条123可为异形齿条,以便与连杆126连接。顺时针或逆时针转动控制部件11,可带动传动轴121和传动齿轮122顺时针或逆时针转动,进而带动传动齿条123与连杆126往复平移,进而使钉仓组件200顺时针或逆时针摆动。
64.如图1、图3和图4所示,旋转头100还可包括旋转头壳体14,旋转头壳体14可包括第一壳(如可为上壳141)和第二壳(如可为下壳142),第一壳和第二壳可固定连接,形成传动机构的安装腔。锁止部件131可与第一壳或第二壳固定连接,以实现锁止部件131的固定安装。弹性复位件133的一端可抵在第一壳或第二壳上,以实现弹性复位件133的一端的固定。
65.图1
‑
图11所示的旋转头100的调节过程如下。
66.如图8和图9所示,当手动向下轴向按动控制部件11时,由于控制部件11与锁止配合部件132相连接,控制部件11向下运动会向下轴向推动锁止配合部件132运动,此时使锁止配合部件132的上端面与锁止部件131的下端面处于离合状态,弹簧处于进一步压缩状态。当手动向下轴向按动控制部件11,同时顺时针旋转控制部件11时,控制部件11上的销钉125会带动传动轴121和锁止配合部件132同时顺时针转动,传动轴121带动传动齿轮122顺时针转动,传动齿轮122带动传动齿条123向右(或向左)移动。传动齿条123又与连杆126固
定连接,连杆126向右(或向左)运动,使钉仓组件200顺时针(或逆时针)摆动,可由图2a所示的状态变换到图2b所示的状态。当钉仓组件200摆动到一定角度时,停止旋转控制部件11,同时停止向下按动控制部件11,此时锁止配合部件132由于受弹簧向上的推力而向上轴向运动,直到锁止配合部件132的上端面与锁止部件131的下端面啮合,如图6和图7所示。由于锁止配合部件132与锁止部件131的啮合,传动轴121不能转动,使传动齿条123和传动齿轮122处于锁定状态,因此钉仓组件200保持在一定角度不变。
67.当手动向下轴向按动控制部件11,同时逆时针旋转控制部件11时,钉仓组件200逆时针(或顺时针)摆动,可由图2a所示的状态变换到图2c所示的状态。钉仓组件200的顺时针摆动原理与钉仓组件200的逆时针摆动原理相同。
68.另一些示例性实施例中,如图12、图14
‑
图17所示,控制部件11包括第一控制部件111和第二控制部件112,第一控制部件111与传动机构连接,并且设置成可沿第一方向运动以带动钉仓组件200摆动,使钉仓组件200可处于图13a
‑
图13c所示的不同状态;第二控制部件112与锁止部件131连接,并且设置成可沿第二方向运动并带动锁止部件131运动,以使锁止部件131与锁止配合部件锁止配合(如图16所示)或分离(如图17所示)。
69.第一控制部件111与传动机构连接,当第一控制部件111沿第一方向运动时,可以带动传动机构运动,进而带动钉仓组件200摆动,使钉仓组件200可处于图13a
‑
图13c所示的不同状态。第二控制部件112与锁止部件131连接,当第二控制部件112沿第二方向运动时,可以带动锁止部件131运动,使锁止部件131与锁止配合部件锁止配合(如图16所示),或使锁止部件131与锁止配合部件分离(如图17所示),此时可通过第一控制部件111调节钉仓组件200的摆动角度。
70.如图13a
‑
图13c所示,第一控制部件111为可旋转的控制钮,第一控制部件111可沿第一方向进行旋转运动。第一控制部件111通过沿顺时针或逆时针方向(即第一方向)转动时,可带动传动机构动作,进而调节钉仓组件200的摆动角度。
71.如图13a
‑
图13c、图16
‑
图17所示,第二控制部件112为可平移的控制钮,第二控制部件112可沿第二方向进行平移运动。第二控制部件112通过往复平移运动,可以带动锁止部件131运动,使锁止部件131与锁止配合部件锁止配合,或使锁止部件131与锁止配合部件分离,此时可通过旋转第一控制部件111来调节钉仓组件200的摆动角度。
72.当然,也可以将第一控制部件111设置成为可平移的控制钮,通过第一控制部件111的往复平移运动,来调节钉仓组件200的摆动角度;将第二控制部件112设置成为可旋转的控制钮,通过第二控制部件112的顺时针或逆时针方向的转动,来实现锁止机构的锁止状态与释放状态的切换。
73.如图14、图16和图17所示,传动机构可包括与第一控制部件111周向固定连接的传动轴121和安装在传动轴121上的传动齿轮122,传动齿轮122形成锁止配合部件。锁止部件131上设有锁止插齿1311,锁止插齿1311设置成可与传动齿轮122啮合锁止或者分离。
74.传动机构的传动齿轮122不仅可以用于传动运动,还可以作为锁止配合部件与锁止部件131配合,简化了旋转头100的结构,有利于旋转头100体积和成本的降低。
75.当然,也可以在传动轴121另外设置齿轮状的锁止配合部件,利用该锁止配合部件与锁止部件131的锁止插齿1311进行啮合锁止或分离。
76.如图16和图17所示,第一控制部件111的旋转轴线可与第二控制部件112的平移方
向垂直。其中,第一控制部件111的旋转轴线可与传动轴121和传动齿轮122的中心轴线共线,第二控制部件112的平移方向可沿着传动轴121和传动齿轮122的径向方向。
77.如图14所示,第一控制部件111与传动轴121可通过销钉125实现同轴且固定(至少周向固定)地连接。传动齿轮122可安装在传动轴121上。传动机构还可包括传动齿条123,传动齿轮122可与传动齿条123相啮合,传动齿条123可与连杆126连接,连杆126可与钉仓组件200连接。其中,传动齿条123可为异形齿条,以便与连杆126连接。顺时针或逆时针转动第一控制部件111,可带动传动轴121和传动齿轮122顺时针或逆时针转动,进而带动传动齿条123与连杆126往复平移,进而使钉仓组件200顺时针或逆时针摆动。
78.如图14
‑
图17所示,第二控制部件112与锁止部件131可通过连接块134连接。第二控制部件112上可设有第一扣合部1121,连接块134上可设有第二扣合部1341,第一扣合部1121和第二扣合部1341可扣接,以便第二控制部件112带动连接块134平移。连接块134上设有第二安装槽1342,锁止部件131的一端可安装至该第二安装槽1342内,以便连接块134带动锁止部件131平移,进而使得锁止部件131可随第二控制部件112平移。
79.如图14
‑
图17所示,锁止机构还可包括弹性复位件133,弹性复位件133的一端可固定,另一端可与运动的锁止部件131相抵,弹性复位件133可设置成使锁止部件131与锁止配合部件保持锁止配合。
80.如图14
‑
图17所示,弹性复位件133可为弹簧(如扁弹簧或压簧等),弹簧套设在锁止部件131上,弹簧的一端(图15
‑
图17中的右端)固定设置,另一端(图15
‑
图17中的左端)与锁止部件131上的第二挡筋1312相抵,且弹簧处于压缩状态。当然,弹性复位件133不限于弹簧,还可以为其他具有弹性的部件。
81.如图14和图15所示,旋转头100还可包括旋转头壳体14,第一控制部件111可与旋转头壳体14转动连接,第二控制部件112可与旋转头壳体14可滑动地连接。旋转头壳体14可包括第一壳(如可为上壳141)和第二壳(如可为下壳142),第一壳和第二壳可固定连接,形成传动机构和锁止部件131的安装腔。弹性复位件133的一端可抵在第一壳和/或第二壳上,以实现弹性复位件133的一端的固定。
82.图12
‑
图17所示的旋转头100的调节过程如下。
83.当手动拉动第二控制部件112时,第二控制部件112沿图17中箭头所示的方向向右滑动,由于第二控制部件112与连接块134相连接,连接块134又与锁止部件131连接,因此锁止部件131也会向右滑动,此时锁止部件131的锁止插齿1311与传动齿轮122分离,弹簧处于进一步压缩状态。当手动拉动第二控制部件112的同时,顺时针旋转第一控制部件111时,第一控制部件111上的销钉125会带动传动轴121也顺时针转动,传动轴121带动传动齿轮122顺时针转动,传动齿轮122带动传动齿条123向左(或向右)移动。传动齿条123又与连杆126固定连接,连杆126向左(或向右)运动,使钉仓组件200顺时针(或逆时针)摆动。当钉仓组件200摆动到一定角度时,停止旋转第一控制部件111,同时松开第二控制部件112,此时锁止部件131由于受弹簧的推力而向左滑动,直到锁止部件131的锁止插齿1311与传动齿轮122啮合,如图16所示。由于锁止部件131的锁止插齿1311与传动齿轮122啮合,传动齿轮122不能转动,使传动轴121和传动齿条123处于锁定状态,因此钉仓组件200保持在一定角度不变。
84.当手动拉动第二控制部件112的同时,逆时针旋转控制部件11时,钉仓组件200逆
时针(或顺时针)摆动。钉仓组件200的顺时针摆动原理与钉仓组件200的逆时针摆动原理相同。
85.在图1
‑
图11和图12
‑
图17所示的旋转头100中,锁止插齿1311可一体地成型在锁止部件131上,或者锁止插齿1311可与锁止部件131固定连接。
86.锁止插齿1311一体地成型在锁止部件131上,或者锁止插齿1311与锁止部件131固定连接,使得锁止插齿1311与锁止部件131刚性连接。与图18和图19所示的滚珠136可弹性伸缩相比,本技术的锁止插齿1311与锁止插槽的锁止配合稳定,锁止插齿1311与锁止插槽不易分离,锁止效果好。
87.当然,锁止插齿1311也可以一体地成型在锁止配合部件132上,或者锁止插齿1311可与锁止配合部件132固定连接。
88.本技术实施例还提供了一种腔镜吻合器,包括主体和钉仓组件200,主体包括上述的腔镜吻合器的旋转头100,旋转头100的传动机构与钉仓组件200连接,旋转头100设置成可带动钉仓组件200摆动。
89.腔镜吻合器是由钉仓组件200和主体组成的一把完整的手术器械。主体中的旋转头100能够控制钉仓组件200摆动并将钉仓组件200锁止。医生可通过体外手动操作控制部件11,来控制体内的钉仓组件200的摆动。由于切割吻合组织的位置不确定,这就需要医生每次使用腔镜吻合器时,均需要调整钉仓组件200的相对位置。本技术的腔镜吻合器,可在体外顺时针或逆时针旋转控制部件11(第一控制部件111),使钉仓组件200摆动,方便医生体外灵活控制钉仓组件200,并且每次摆动调整钉仓组件200后,旋转头100都可以进行自锁,保持钉仓组件200位置的稳定,保持钉仓组件200被调整后的位置相对不变。
90.虽然本技术所揭露的实施方式如上,但所述的内容仅为便于理解本技术而采用的实施方式,并非用以限定本技术。任何本技术所属领域内的技术人员,在不脱离本技术所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本技术的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。