1.本发明涉及用于机动车辆的自动化的换挡传动装置,其传动装置壳体具有能拆卸的盖,在盖上布置有传动装置切换单元,其中,传动装置切换单元具有执行器,以用于操纵分别与这些执行器相配属的切换拨叉,并且其中,借助每个切换拨叉能分别使换挡传动装置的所配属切换套管相对于传动装置轴同轴移动。
背景技术:
2.在具有内燃机的车辆中,为了使车辆运行需要使驱动马达的转速和/或转动力矩与机动车辆的当前运行状态分别匹配。为此目的,内燃机的曲轴在驱动技术上经由被构造为摩擦离合器的切换和分离离合器与能手动切换的机械传动装置连接。在此,在传动装置换挡期间,要求离合器中断传动系中的动力流。
3.尤其为了提高舒适性,在现代的机动车中广泛使用自动的行星传动装置,其中,通常设有液力变矩器代替离合器。出于更好的能量效率以及更有利的制造成本的原因,越来越多地使用到能自动化切换的传动装置,其传动比级借助多个执行器自动切换。与传统的自动传动装置相比,自动化的换挡传动装置不需要带有损耗的液力变矩器,而是与机械的摩擦离合器一起工作,与传统的机械的手动换挡传动装置不同地,该自动化的换挡传动装置不是由驾驶员借助脚踏板来操纵,而是自动地借助附加的离合器执行器来操纵用以为挡位切换做准备。在传动装置中进行的换挡在此分别借助能通过所配属的执行器操纵的切换拨叉来执行,切换拨叉使传动装置中的切换套管同轴地在所配属的传动装置轴上移动。各自的切换套管在此将挡级的分别配属的、被构造为空套轮的齿轮要么抗相对转动地与所配属的传动装置轴连接,要么以能转动的方式将该传动装置轴释放。
4.为了操纵切换拨叉,在这种自动化的换挡传动装置中使用到传动装置切换单元,传动装置切换单元呈盖状布置在传动装置壳体上。这种传动装置切换单元承载有多个执行器,借助这些执行器使得所述的能以轴向运动的方式支承在纵向引导部上或支承在纵向引导部处的切换拨叉能纵向移动,以用于实施挡位切换。
技术实现要素:
5.本发明的任务是,提供一种自动化的换挡传动装置,其换挡操纵机构以大大简化的方式构建以用于降低制造成本以及能更容易装配。此外应实现的是,使得由于操纵切换套管而出现的倾斜力矩不传送到执行器。
6.该任务的解决方案利用具有权利要求1的特征的自动化的换挡传动装置来解决。有利的改进方案在从属权利要求中限定。
7.因此,本发明涉及一种用于机动车辆的自动化的换挡传动装置,其具有传动装置壳体,该传动装置壳体具有能拆卸的盖,在盖上布置有传动装置切换单元,其中,传动装置切换单元具有执行器,以用于操纵分别配属于这些执行器的切换拨叉,并且其中,借助每个切换拨叉分别能使换挡传动装置的所配属的切换套管相对于传动装置同轴移动。
8.为了解决所提出的问题,在该传动装置中设置的是,在传动装置壳体中紧固有平行于换挡传动装置的纵轴线延伸的纵向引导部,在纵向引导部上以能纵向移动的方式容纳有至少两个切换拨叉。每个切换拨叉具有关于纵向引导部偏心布置的耦接臂,每个执行器具有能轴向移动的、带有耦接几何形状的操纵杆,并且每个耦接臂在盖和传动装置壳体的组装状态下以如下方式与分别配属的执行器的各自所配属的耦接几何形状协同作用,即,使得执行器的操纵杆的线性运动能传递到切换拨叉上以用于使切换拨叉在纵向引导部上移动。
9.由于切换拨叉的耦接臂和执行器的耦接几何形状能拆卸地彼此嵌接,使得自动化的换挡传动装置、尤其是盖和整合在盖上的传动装置切换单元能够特别快速地装配在传动装置壳体上并拆除。尽可能地避免了由切换拨叉引起的可能的倾斜力矩传递到传动装置切换单元的执行器中。此外,通过整合到传动装置壳体中的纵向引导部实现了对起作用的力矩的良好的支持。
10.根据技术上有利的设计方案设置的是,执行器的操纵杆具有柱形的几何形状,其中每个切换拨叉具有带保持臂的空心柱形的引导套筒,并且分别在每个保持臂的指离引导套筒的端部上构造有弓形的操纵区段用于嵌入到分别配属的切换套管中。由此,使得在简单装配切换拨叉的同时能节省空间地操纵位于换挡传动装置的齿轮之间的切换套管。
11.本发明的另一改进方案设置的是,切换拨叉中的每个切换拨叉借助其引导套筒平行于换挡传动装置的纵轴线无间隙移动地容纳在纵向引导部上。因此,提供了切换拨叉在纵向引导部上的机械稳固的引导。如有必要,切换拨叉可以防扭转地设置在纵向引导部上。因此,引导套筒和纵向引导部例如能够分别具有非圆形的或多边形的横截面几何形状。在引导套筒之间至少存在大的轴向间距,使得切换拨叉的引导套筒能如下程度地相互无关地轴向移动,即,传动装置的挡级能通过轴向移动切换套管安全且单独地切换。
12.在具有配备了至少三个执行器、三个切换拨叉和三个切换套筒的传动装置切换单元的换挡传动装置中,优选设置的是,在第一切换拨叉上,第一耦接臂在引导套筒的附近构造在所配属的保持臂上。由此,传动装置切换单元的执行器可以平行于其纵轴线彼此间隔开地布置。此外,第一切换拨叉的引导套筒可以基本上无倾斜力矩地在纵向引导部上轴向移动。
13.在该换挡传动装置中,传动装置切换单元也可以具有多于三个的执行器,例如具有第四执行器,利用该第四个执行器能对下游的被构造为行星传动装置的范围传动装置就其两个传动级方面进行转换。
14.在刚刚提到的具有至少三个切换拨叉的换挡传动装置中,还优选设置的是,在第二切换拨叉上,第二耦接臂构造在弓形的操纵区段的自由端部处。由此能够通过传动装置切换单元的所配属的执行器对第二切换拨叉的弓形的操纵区段进行特别直接的、即尽可能少力矩的操纵。此外,在第三切换拨叉上,那里的第三耦接臂在弓形的操纵区段的区域中大致居中地构造在其自由端部与保持臂之间。由此得到了要由第三执行器施加的其值大约介于第一和第二切换拨叉的值之间的操纵力矩和操纵力。
15.此外,可以有利地设置是,耦接臂的自由端部分别具有耦接区段,耦接区段垂直于换挡传动装置的纵轴线取向以及分别朝所配属的执行器的操纵杆的方向指向。耦接区段在此在它们的自由端部处可以分别长方形或正方形或半球形地构成。总之,由此实现了切换
拨叉与执行器之间的界面能易于拆卸并且在盖以及传动装置壳体组装时能再次建立。此外,耦接区段分别是耦接臂的延续部,由此简化了制造。
16.优选地,每个耦接臂具有至少一个弯折的区段。由此实现了执行器在传动装置壳体的盖的内侧上的空间布置方面的提高的灵活性。
17.根据另一有利的改进方案设置的是,执行器的操纵杆平行于换挡传动装置的纵轴线取向地布置在传动装置壳体的盖的内侧上,并且直接相邻的执行器的操纵杆的各自的自由端部沿轴向上相反的方向指向。由此,可以非常节省空间地并排布置被证明是可靠的线性执行器,例如压缩空气执行器或液压执行器。
18.此外优选设置是,执行器的每个操纵杆具有耦接几何形状,耦接几何形状分别由横向于换挡传动装置的纵轴线延伸的耦接槽形成,其中,在传动装置壳体和盖的组装状态下,在每个耦接槽中平行于纵轴线无间隙地分别容纳有切换拨叉的耦接臂的耦接区段。由此实现了在传动装置侧的切换拨叉与传动装置切换单元的执行器之间的稳固的、易于制造的、能快速装配以及能分开的且尽可能无间隙的机械界面。
19.最后可以设置的是,在传动装置壳体的盖中整合有用于压力介质线路的至少一个接口,流体的压力介质通过接口能被导引至传动装置切换单元的执行器。在此,尤其还可以设置的是,将第一接口整合到传动装置壳体的盖中,流体的压力介质能通过该第一接口被导引至所提及的挡位切换执行器或所提及的范围切换执行器;将第二接口整合到盖中,流体的压力介质能通过该第二接口被导引至传动装置轴制动器;并且将第三接口整合到盖中,流体的压力介质能通过该第三接口被导引至车辆的换挡离合器。通过将所述压力介质接口布置在传动装置壳体中或其盖中,使得制造廉价地避免了在传动装置壳体的主要部分上产生这种接口。
20.此外,在一个实施方式中可以设置有传动系系统。所述传动系系统包括上述自动化的换挡传动装置,其中,所述传动系系统附加地具有传动装置轴制动器和换挡离合器。第一接口整合到传动装置壳体的盖中,流体的压力介质能通过该第一接口被导引至切换执行器。第二接口整合到盖中,流体的压力介质能通过该第二接口被导引至传动装置轴制动器。最后,第三接口整合到盖中,流体的压力介质能通过该第三接口被导引至换挡离合器。
附图说明
21.说明书附有附图以进一步解释本发明。其中:
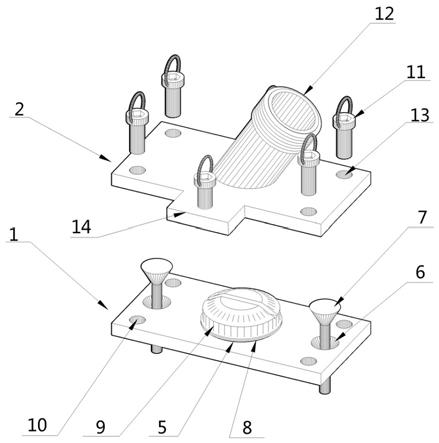
22.图1示出根据本发明的具有传动装置切换单元的自动化的换挡传动装置的盖的朝向传动装置壳体内部空间的内侧的立体俯视图;并且
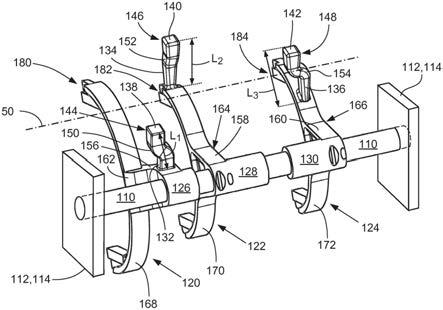
23.图2示出紧固在传动装置壳体上的具有第一、第二和第三切换拨叉的纵向引导部的立体视图。
具体实施方式
24.因此,图1示出了根据本发明的具有布置在盖侧的传动装置切换单元26的自动化的换挡传动装置114的盖10的内侧14的立体俯视图。图2中所示的传动装置壳体112的盖10具有与其内侧14相对的外侧12以及基本上在边缘侧环绕的紧固凸缘16。在该紧固凸缘16上能放置未示出的扁平密封件。紧固凸缘16具有多个未连续标识的孔20,未示出的用于将盖
10机械地与自动化的换挡传动装置114的传动装置壳体112连接起来的能拆卸的紧固元件(例如螺钉、栓等)能引导穿过这些孔。
25.在盖10的内侧14上布置有已经提到的传动装置切换单元26,传动装置切换单元具有三个在此受到关注并且被构造为线性执行器的执行器30、32、34。第四执行器36用于对未示出的范围传动装置的两个传动级进行转换。该第四执行器36与本发明的解释无关,并因此在下文中不再进一步描述。
26.三个首先提到的执行器30、32、34以如下方式并排布置,即,使得它们的操纵环节的自由端部交替地指向相反的轴向方向。借助这些执行器30、32、34,能操纵自动化的换挡传动装置114的三个切换拨叉120、122、124,切换拨叉嵌入到传动装置的分别配属的切换套管的容纳槽中。切换套管分别抗相对转动地且能轴向移动地与传动装置的构造为空套轮的齿轮相邻地布置在未示出的传动装置轴上。通过切换套管在传动装置轴上的轴向移动,使得它们以如下方式与两个分别相邻的空套轮之一接触,即,使得各自的齿轮与传动装置轴抗相对转动地连接。由此,借助齿轮可以将转动力矩从传动装置轴传递到齿轮或从齿轮传递到传动装置轴上。这本身对于传动装置领域技术人员来说是已知的,并因此不需要单独示出。
27.前三个执行器30、32、34可以流体地、例如用压缩空气或用液体,例如液压油等运行。在此关键的三个执行器30、32、34中的每一个分别具有实心的圆柱体的操纵杆40、42、44,它们平行于自动化的换挡传动装置114的纵轴线50取向。第一执行器30在此具有第一操纵杆40,第二执行器32具有第二操纵杆42并且第三执行器34具有第三操纵杆44。三个操纵杆40、42、44中的每一个分别具有耦接几何形状62、64、66。此外,三个操纵杆40、42、44分别以能在所配属的支承位置52、54、56轴向移动的方式容纳在盖10的内侧14上。三个执行器30、32、34分别具有大致呈圆柱形的壳体70、72、74。执行器30、32、34的耦接几何形状62、64、66的底部基本上平行于自动化的换挡传动装置114的纵轴线50取向。
28.第二执行器32的耦接几何形状64和第三执行器34的耦接几何形状66分别构造在所配属的操纵杆42、44的端部侧。与之相应地,第一执行器30的操纵杆40的耦接几何形状62构造在支承位置52与第一执行器30的壳体70之间。
29.三个操纵杆40、42、44的耦接几何形状62、64、66在此示范性地分别构造为简单的耦接槽82、84、86,它们横向于或者说垂直于纵轴线50延伸。三个耦接槽82、84、86中的每一个具有近似矩形的横截面几何形状,这在制造技术方面能够相对容易制造。
30.盖10还具有用于未示出的流体(例如压缩空气或适合于执行器30、32、34运行的液体)的第一接口92、第二接口94、第三接口96和第四接口98。第一接口92用于向四个执行器30、32、34、36供应压力介质,而另外两个接口94、96被设置用于将压力介质供应给传动装置轴制动器或车辆的换挡离合器,这两者均未示出。
31.如已经简要提及地,图2示出了自动化的换挡传动装置114的传动装置壳体侧的具有三个切换拨叉120、122、124的纵向引导部110的立体视图。纵向引导部110由杆形成,该杆平行于未指明的传动装置壳体112的纵轴线50地紧固在该传动装置壳体上。在这里所示的实施例中,纵向引导部110在横截面上圆柱形地实施,但是它也可以多边形地实施以防止扭转。
32.三个切换拨叉120、122、124分别具有引导套筒126、128、130,这些引导套筒以能滑
动运动的方式并且尽可能无间隙地容纳在纵向引导部110上。为此目的,切换拨叉120、122、124的三个引导套筒126、128、130分别具有近似空心圆柱体的几何形状。在纵向引导部110的不同于圆柱体形状的其他几何形状的情况下,引导套筒126、128、130具有与之在几何上相对应的横截面几何形状。借助切换拨叉120、122、124,如提及地能分别操纵自动化的换挡传动装置114的未示出的切换套管,由此,使得换挡传动装置114的同样未绘制的空套轮能抗相对转动地与所配属的传动装置轴耦接或能再次从该传动装置轴松开。
33.三个切换拨叉120、122、124中的每一个还具有相对于纵向引导部110偏心地布置的具有耦接区段138、140、142的耦接臂132、134、136,其中,耦接区段分别优选一体式地构造在三个耦接臂132、134、136中的一个的自由端部144、146、148上。三个耦接臂132、134、136的自由端部144、146、148基本上垂直于换挡传动装置的纵轴线50地取向。第一耦接臂132在此整合地构造在第一切换拨叉120上,第二耦接臂134整合地构造在第二切换拨叉122上,并且相应地,第三耦接臂136整合地构造在第三切换拨叉124上。耦接臂132、134、136在盖10和传动装置壳体112的装配状态下分别朝装配在盖10上的传动装置切换单元26的方向定向。例如,三个耦接区段138、140、142在此示例性地分别具有近似立方体的或长方体形的造型。
34.在盖10和传动装置壳体112的装配状态下,耦接区段138、140、142分别尽可能无间隙地嵌入到执行器30、32、34的操纵杆40、42、44的所配属的耦接槽82、84、86中,由此能精确地轴向和单独地操纵切换拨叉120、122、124以分别触发自动化的换挡传动装置114的挡位切换。由于三个执行器30、32、34的耦接槽82、84、86横向于纵轴线50取向,使得在由执行器30、32、34发动的换挡过程时没有显著的转动力矩或倾斜力矩从切换拨叉120、122、124导入到传动装置切换单元26的执行器30、32、34中。每个耦接臂132、134、134在此示范性地还具有弯折的区段150、152、154,其便于耦接区段138、140、142几何上配合准确地嵌入到分别配属的耦接槽82、84、86中。
35.不同于矩形或方形的耦接区段138、140、142的几何结构也是可能的,只要执行器30、32的操纵杆40、42、44的与耦接区段138、140、142、34协同作用的耦接几何形状62、64、66至少局部与这些耦接几何形状在几何上相对应地构成即可。
36.在三个切换拨叉120、122、124的每个引导套筒126、128、130上分别整体地构造有大致径向向外指向的保持臂156、158、160,在它们的相对于纵向引导部110径向向外指向的端部162、164、166处分别优选一体式地构造有弓形的操纵区段168、170、172以用于嵌入到自动化的换挡传动装置114的未示出的切换套管的槽中。
37.第一耦接臂132在此示例性地远离第一切换拨叉120的弓形的操纵区段168的自由端部180地在第一切换拨叉120的保持臂156的区域中紧邻其引导套筒126地构造。第二耦接臂134在此仅示范性地在第二切换拨叉122的弓形的操纵区段170的自由端部182的区域中整体地构造在该第二切换拨叉上。第三耦接臂136在弓形的操纵区段172的区域中大约居中地位于其自由端部184与第三切换拨叉124的保持臂160之间。
38.由于耦接臂132、134、136上述地定位在与它们分别配属的切换拨叉120、122、124上,使得执行器30、32、34可以彼此错开平行地定位在盖侧的传动装置切换单元26之内。三个耦接臂132、134、136各自的轴向长度l1、l2、l3在此分别如下这样地定尺寸,即,使得它们的耦接区段138、140、142嵌入到执行器30、32、34的操纵杆40、42、44的所配属的耦接几何形
状62、64、66中。切换拨叉120、122、124上的耦接臂132、134、136的不同空间布置、长度l1、l2、l3以及造型依赖于关于传动装置切换单元26的三个执行器30、32、34在传动装置壳体112的盖10的内侧14上的空间上的定位方面的要求。
39.由于切换拨叉120、122、124的耦接臂132、134、136和执行器30、32、34的耦接几何形状62、64、66根据机械界面的类型交错嵌接,在需要的情况下这就能快速地彼此分开,使得自动化的换挡传动装置114的操纵设备能特别是毫无问题地以及简单地装配和拆除。此外,很大程度上避免了力和/或倾斜力矩从切换拨叉120、122、124出发并导入到传动装置切换单元26。
40.附图标记列表
41.10传动装置壳体的盖
42.12盖的外侧
43.14盖的内侧
44.16盖的紧固凸缘
45.20盖中的孔
46.26传动装置切换单元
47.30第一执行器
48.32第二执行器
49.34第三执行器
50.36第四执行器
51.40第一执行器30的操纵杆
52.42第二执行器32的操纵杆
53.44第三执行器34的操作杆
54.50换挡传动装置的纵轴线
55.52针对操纵杆40的支承位置
56.54针对操纵杆42的支承位置
57.56针对操作杆44的支承位置
58.62操纵杆40的耦接几何形状
59.64操纵杆42的耦接几何形状
60.66操纵杆44的耦接几何形状
61.70第一执行器的壳体
62.72第二执行器的壳体
63.74第三执行器的壳体
64.82操纵杆40中的耦接槽
65.84操纵杆42中的耦接槽
66.86操纵杆44中的耦接槽
67.92用于流体的第一接口
68.94用于流体的第二接口
69.96用于流体的第三接口
70.98用于流体的第四接口
71.110纵向引导部
72.112传动装置壳体
73.114自动化的换挡传动装置
74.120第一切换拨叉
75.122第二切换拨叉
76.124第三切换拨叉
77.126切换拨叉120的引导套筒
78.128切换拨叉122的引导套筒
79.130切换拨叉124的引导套筒
80.132切换拨叉120上的耦接臂
81.134切换拨叉122上的耦接臂
82.136切换拨叉124上的耦接臂
83.138耦接臂132的耦接区段
84.140耦接臂134的耦接区段
85.142耦接臂136的耦接区段
86.144耦接臂132的自由端部
87.146耦接臂134的自由端部
88.148耦接臂136的自由端部
89.150耦接臂132的弯折的区段
90.152耦接臂134的弯折的区段
91.154耦接臂136的弯折的区段
92.156切换拨叉120的保持臂
93.158切换拨叉122的保持臂
94.160切换拨叉124的保持臂
95.162保持臂156的端部
96.164保持臂158的端部
97.166保持臂160的端部
98.168拨叉120的弓形的操纵区段
99.170拨叉122的弓形的操纵区段
100.172拨叉124的弓形的操纵区段
101.180弓形的操纵区段168的自由端部
102.182弓形的操纵区段170的自由端部
103.184弓形的操纵区段172的自由端部
104.l1耦接臂132的长度
105.l2耦接臂134长度
106.l3耦接臂136长度
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。