技术特征:
1.一种基于转向迟滞的车辆控制方法,其特征在于,包括:获取目标车辆在当前时刻的横向运动状态量和所述目标车辆在当前时刻的纵向运动状态量;基于所述横向运动状态量以及预设横向运动学模型,确定所述目标车辆在下一时刻的前轮转角角度;其中,所述预设横向运动学模型中包含转向迟滞响应时间常数;基于所述纵向运动状态量以及预设纵向运动学模型,确定所述目标车辆在下一时刻的加速度;根据所述前轮转角角度和所述加速度调整所述目标车辆在下一时刻的运行状态。2.根据权利要求1所述的方法,其特征在于,所述基于所述横向运动状态量以及预设横向运动学模型,确定所述目标车辆在下一时刻的前轮转角角度,包括:将所述横向运动状态量代入所述预设横向运动学模型,得到待解横向运动学模型;根据所述待解横向运动学模型和最优解库,确定所述目标车辆在下一时刻的前轮转角角度。3.根据权利要求1所述的方法,其特征在于,所述基于所述纵向运动状态量以及预设纵向运动学模型,确定所述目标车辆在下一时刻的加速度,包括:将所述纵向运动状态量代入所述预设纵向运动学模型,得到待解纵向运动学模型;根据所述待解纵向运动学模型和最优解库,确定所述目标车辆在下一时刻的加速度。4.根据权利要求1或2所述的方法,其特征在于,所述预设横向运动学模型包括:横向位移误差方程、航向角误差方程和前轮转角方程;其中,所述前轮转角方程中包含所述转向迟滞响应时间常数;所述横向运动状态量包括:航向角误差以及前轮转角角度。5.根据权利要求1或3所述的方法,其特征在于,所述预设纵向运动学模型包括:纵向位置误差方程和纵向速度误差方程;其中,所述纵向运动状态量包括:车辆纵向位置误差和车辆纵向速度误差。6.根据权利要求2或3所述的方法,其特征在于,在所述横向运动状态量和所述纵向运动状态量的数据格式不满足最优解库的数据处理格式的情况下,所述方法还包括:根据所述最优解库的数据处理格式对所述横向运动状态量和所述纵向运动状态量的数据格式进行处理,将所述横向运动状态量和所述纵向运动状态量的数据格式调整为所述最优解库的数据处理格式。7.一种基于转向迟滞的车辆控制装置,其特征在于,包括:获取模块,用于获取目标车辆在当前时刻的横向运动状态量和所述目标车辆在当前时刻的纵向运动状态量;确定模块,用于基于所述横向运动状态量以及预设横向运动学模型,确定所述目标车辆在下一时刻的前轮转角角度;其中,所述预设横向运动学模型中包含转向迟滞响应时间常数;所述确定模块,用于基于所述纵向运动状态量以及预设纵向运动学模型,确定所述目标车辆在下一时刻的加速度;控制模块,用于根据所述前轮转角角度和所述加速度调整所述目标车辆在下一时刻的运行状态。
8.根据权利要求7所述的装置,其特征在于,所述预设横向运动学模型包括:横向位移误差方程、航向角误差方程和前轮转角方程;其中,所述前轮转角方程中包含所述转向迟滞响应时间常数;所述横向运动状态量包括:航向角误差以及前轮转角角度;所述预设纵向运动学模型包括:纵向位置误差方程和纵向速度误差方程;其中,所述纵向运动状态量包括:车辆纵向位置误差和车辆纵向速度误差。9.一种计算机设备,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1
‑
6任一项所述的基于转向迟滞的车辆控制方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1
‑
6任一项所述的基于转向迟滞的车辆控制方法。
技术总结
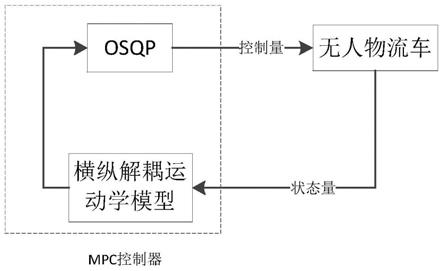
本申请公开了一种基于转向迟滞的车辆控制方法、装置、设备及存储介质,该方法包括:获取目标车辆在当前时刻的横向运动状态量和目标车辆在当前时刻的纵向运动状态量;基于横向运动状态量以及预设横向运动学模型,确定目标车辆在下一时刻的前轮转角角度;其中,预设横向运动学模型中包含转向迟滞响应时间常数;基于纵向运动状态量以及预设纵向运动学模型,确定目标车辆在下一时刻的加速度;根据前轮转角角度和加速度调整目标车辆在下一时刻的运行状态。这样可以通过解耦后的横纵向模型对目标车辆进行综合平滑控制,并引入转向迟滞响应时间常数,保证对目标车辆的及时控制,提高车辆运行的稳定性和鲁棒性。运行的稳定性和鲁棒性。运行的稳定性和鲁棒性。
技术研发人员:阎兴 窦凤谦 边学鹏 张亮亮
受保护的技术使用者:京东鲲鹏(江苏)科技有限公司
技术研发日:2021.09.17
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。