技术特征:
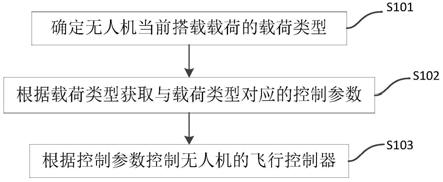
1.一种应急处置场景下的无人机控制方法,其特征在于,包括:确定无人机当前搭载载荷的载荷类型;根据所述载荷类型获取与所述载荷类型对应的控制参数;根据所述控制参数控制所述无人机的飞行控制器。2.根据权利要求1所述的方法,其特征在于,所述获取与所述载荷类型对应的控制参数,包括:根据所述无人机的设计参数确定负载性能参数;根据所述负载性能参数确定各搭载载荷对应的工作点;基于所述工作点确定所述负载性能参数对应的模型包线;根据所述模型包线确定与所述载荷类型对应的控制参数;其中,所述载荷类型与所述负载性能参数相关。3.根据权利要求2所述的方法,其特征在于,所述根据所述无人机的设计参数确定负载性能参数,包括:根据所述无人机的设计参数、动力学模型和运动学模型确定负载性能参数;所述负载性能参数至少包括载荷质量、重心分布、转动惯量。4.根据权利要求2所述的方法,其特征在于,所述根据所述负载性能参数确定各搭载载荷对应的工作点,包括:遍历所述负载性能参数,根据遍历结果确定所述无人机当前搭载的所有载荷;将所述各搭载载荷对应的负载性能参数确定为各搭载载荷对应的工作点。5.根据权利要求2或4所述的方法,其特征在于,所述基于所述工作点确定所述负载性能参数对应的模型包线,包括:通过基于频率数据响应的系统辨识算法在所述工作点对所述无人机的控制通道进行识别,获取所述工作点的控制通道参数和数学表达式;将各所述工作点的控制通道参数和数学表达式构成的集合确定为模型包线。6.根据权利要求2所述的方法,其特征在于,所述根据所述模型包线确定与所述载荷类型对应的控制参数,包括:根据所述模型包线中各工作点对应的模型参数确定与所述载荷类型对应的控制参数;其中,所述模型参数至少包含传递函数零极点,或系统状态转移矩阵和系统输入矩阵,所述控制参数至少包括控制器增益、积分转折频率、微分环节零点、微分环节极点、校正参数。7.根据权利要求2所述的方法,其特征在于,所述方法还包括:在所述控制参数对应的飞行控制器的控制性能不满足所述载荷类型对应的鲁棒性指标的情况下,根据更新后的模型参数调整所述载荷类型对应的控制参数。8.一种应急处置场景下的无人机控制装置,其特征在于,包括:确定模块,用于确定无人机当前搭载载荷的载荷类型;获取模块,用于根据所述载荷类型获取与所述载荷类型对应的控制参数;控制模块,用于根据所述控制参数控制所述无人机的飞行控制器。9.一种无人机,包括存储器、控制器及存储在所述存储器上并可在所述控制器上运行的计算机程序,其特征在于,所述控制器执行所述程序时实现如权利要求1
‑
7中任一项所述
的应急处置场景下的无人机控制方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被控制器执行时,实现如权利要求1
‑
7中任一项所述的应急处置场景下的无人机控制方法。
技术总结
本申请公开了一种应急处置场景下的无人机控制方法、装置、无人机及介质,其中,该方法包括确定无人机当前搭载载荷的载荷类型;根据载荷类型获取与载荷类型对应的控制参数;根据控制参数控制无人机的飞行控制器。由于在控制飞行控制器的过程中,考虑到了无人机搭载的载荷因素,因此可以避免无人机当前搭载的载荷对无人机的飞行性能的影响。无人机的飞行性能的影响。无人机的飞行性能的影响。
技术研发人员:张翔 贺钢锋 蒋俊 张斌 吕颖 高岳毅 陈妍 施祖建 邢培育 曹钧
受保护的技术使用者:江苏省安全生产科学研究院
技术研发日:2021.09.28
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。