技术特征:
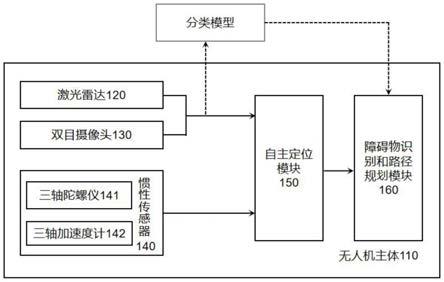
1.一种自主定位式无人机,其特征在于,包括:无人机本体;激光雷达,其连接所述无人机主体,以获取环境信息;双目摄像头,其连接所述无人机主体,以获取地面信息;惯性传感器,其连接所述无人机主体,以获取无人机位姿信息;自主定位模块,其与所述激光雷达、所述双目摄像头和所述惯性传感器通信连接,以解析所述无人机的位置信息,并创建环境地图;障碍物识别和路径规划模块,其连接所述自主定位模块,能够进行障碍物识别、全局和局部路径规划。2.如权利要求1所述的自主定位式无人机,其特征在于,所述惯性传感器包括三轴陀螺仪和三轴加速度计。3.一种自主定位式无人机室内路径自主规划方法,基于如权利要求1所述的自主定位式无人机,其特征在于,包括:步骤一、确定无人机起点和目标点,并根据室内环境参考图规划全局路径;步骤二、实时获取激光雷达、双目摄像头和惯性传感器的探测信息,解析所述无人机的位置信息,并创建环境地图;步骤三、预判当前节点到下一节点飞行过程是否存在障碍物,若存在,进行障碍物识别和特征提取;步骤四、根据所述障碍物的特征信息,规划局部路径,并更新所述全局路径和环境地图。4.如权利要求3所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述步骤一包括:将所述室内环境参考图进行栅格化,并对所述参考图中的障碍物进行膨胀处理;将不含障碍物的网格标记为自由栅格,含有障碍物的栅格标记为障碍栅格,并划分为自由栅格区和障碍栅格区;将紧邻障碍所述栅格区的所述自由栅格作为顶点,初始化无人机起点与各顶点的距离;向外层层扩展,循环搜索,直到所述起点与所述各顶点的距离最短。5.如权利要求4所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述解析无人机的位置信息包括:无人机本体按照所述全局路线行进,获取所述惯性传感器的探测信息,利用惯性积分方法连续计算飞行的相对距离和航向;根据所述起点位置和所述航向计算当前无人机的绝对位置及方位:基于卡尔曼滤波模型,建立航迹推算状态方程,并根据所述状态方程,计算误差状态向量和速度测量值误差;结合贝叶斯滤波算法,以所述全局路径约束所述航迹推算轨迹。6.如权利要求5所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述障碍物识别包括:获取激光雷达的采集特征图,将所述特征图分割为多个相等的方形区块;
分别计算每个所述方形区块的占比值,将所述占比值大于占比阈值的方形区块作为感兴趣区块;设定邻域和最低密度值,遍历所述感兴趣区块,得到每个所述感兴趣区块的中心点;若相邻感兴趣区块的所述中心点密度相连,则所述相邻感兴趣区块归为一个障碍物团簇。7.如权利要求6所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述特征提取包括:采用卷积神经网络训练得到分类模型;获取所述激光雷达和所述双目摄像头采集的特征图,将三维锚框投影到所述特征图中;根据投影结果将所述特征图裁剪成多个二维锚框;将所述二维锚框输入到所述分类模型中进行目标分类和边界框回归。8.如权利要求7所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述二维锚框尺度为8、16、32中的一种,比例为2:1、1:1、1:2中的一种。9.如权利要求8所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述局部路径包括:基于所述无人机的位置信息,计算无人机所受的势场合力;判断所述无人机是否处于局部极小值;如果是,所述无人机沿斥力势场等势线绕行,直到逃离局部极小值区域。10.如权利要求9所述的自主定位式无人机室内路径自主规划方法,其特征在于,所述局部极小值包括:无人机所受势场合力趋于零和或无人机行进位移与路程比趋于零。
技术总结
本发明公开了一种自主定位式无人机及其室内路径自主规划方法,包括确定无人机起点和目标点,并根据室内环境参考图规划全局路径;实时获取激光雷达、双目摄像头和惯性传感器的探测信息,解析无人机的位置信息,并创建环境地图;预判当前节点到下一节点飞行过程是否存在障碍物,若存在,进行障碍物识别和特征提取;根据障碍物的特征信息,规划局部路径,并更新所述全局路径和环境地图。本发明提供的室内路径自主规划方法可用于GPS缺失的室内环境,自主定位精度高,构建高精度环境地图,还可规划局部最优路径并快速绕过障碍物。局部最优路径并快速绕过障碍物。局部最优路径并快速绕过障碍物。
技术研发人员:谷雷 孟娟 李聪 张军锋 王钦鑫 秦骁
受保护的技术使用者:吉林工程技术师范学院
技术研发日:2021.09.16
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。