1.本发明涉及道路建设技术领域,尤其是涉及一种路面基层无人驾驶机群碾压系统。
背景技术:
2.路面基层,是在路基表面上用单一材料按照一定的技术措施分层铺筑而成的层状结构,其材料质量的好坏直接影响路面的质量和使用性能;基层是整个道路的承重层,能够起到稳定路面的作用;路面基层分为无机结合料稳定基层和碎、砾石基层。
3.相关技术中,对路面进行铺设时,首先通过摊铺机将路面基层的材料进行铺设,然后人工驱动压路机对路面上的材料进行碾压,使得材料压实,完成道路的铺设。
4.针对上述中的相关技术,发明人认为在道路铺设过程中,因为工程轴周期短,施工时间紧张,需要工作人员夜晚延长工作时间,长时间的高强度工作,会影响工作人员的健康。
技术实现要素:
5.为了减少对工作人员健康的影响,本发明提供一种路面基层无人驾驶机群碾压系统。
6.本发明提供的一种路面基层无人驾驶机群碾压系统采用如下的技术方案:一种路面基层无人驾驶机群碾压系统,包括用于对信号进行监控的监控装置、用于对信号进行传输的通讯装置、多个用于对路面材料进行铺设的摊铺机以及多个用于对路面进行碾压的无人压路机,所述摊铺机上设置有数据采集装置,所述无人压路机上设置有调节装置。
7.通过采用上述技术方案,对道路进行铺设时,通过数据采集装置对道路的现状进行了解,然后将材料摊铺于路面上,然后通讯装置将铺设材料结束的信号传递至无人压路机时,再通过调节装置调节无人压路机,使得无人压路机对材料进行压实,在压实过程中通过监控装置对无人压路机进行监控,完成路面的铺设;设计的路面基层无人驾驶机群碾压系统,通过无人压路机,便于对路面上铺设的材料进行压实,减少人工操作,进而减少对工作人员健康的损害,同时,便于延长压路机的工作时长,进而提高施工效率。
8.可选的,所述监控装置包括营地控制中心以及现场控制中心,所述现场控制中心用于对现场施工情况进行监控,所述营地控制中心用于对所述现场控制中心的数据进行监控。
9.通过采用上述技术方案,现场控制中心的设置,通过无线电信号的传输,便于对施工现场的施工情况进行监控,提高现场施工效率;营地控制中心的设置,便于对现场控制中心的设备进行完善,提高对现场施工情况的监控力度,进而保证现场施工的稳定性。
10.可选的,所述通讯装置包括卫星、移动基站以及北斗定位基站,所述卫星用于对所述摊铺机和无人压路机进行追踪,所述移动基站用于对所述摊铺机和无人压路机输出的信
号进行传输,所述北斗定位基站用于对所述卫星传输的信号进行处理。
11.通过采用上述技术方案,卫星的设置,便于对摊铺机和无人压路机进行信号的传输,进而便于摊铺机和无人压路机的工作,提高摊铺机和无人压路机工作的精准度;移动基站的设置,提高摊铺机和无人压路机的信号强度;北斗定位基站,便于对摊铺机和无人压路机的位置信息进行收集,进而便于对摊铺机和无人压路机的调配。
12.可选的,所述移动基站包括用于接收信号的信号塔以及用于所述信号塔安装的安装座,所述安装座远离所述信号塔一侧设置有多个万向轮。
13.通过采用上述技术方案,信号塔的设置,便于信号得接收和输出;安装座的设置,便于信号塔的安装,提高信号塔的安装的稳定性;万向轮的设置,便于信号塔位置的调整,进而便于提高信号传输的稳定性。
14.可选的,所述数据采集装置包括工业智能平板以及用于识别路面状况的识别组件,所述工业智能平板位于所述摊铺机上。
15.通过采用上述技术方案,对路面情况进行了解时,调节识别组件,使得识别组件对路况信息进行收集,然后通过线路传递至工业智能平板对路况进行分析,然后通过工业智能平板调节摊铺机针对具体路况进行材料的铺设;识别组件的设置,便于对不同路况的信息进行收集,进而便于对不同路况的路面进行精准铺设,提高道路铺设质量;工业智能平板的设置,便于对路况信息进行分析,进而便于对摊铺机的铺设路径进行规划。
16.可选的,所述识别组件包括用于检测路面厚度的检测器以及用于识别道路边沿的监测器,所述检测器和监测器均与所述工业智能平板通过线路连接,所述检测器和监测器均位于所述摊铺机上。
17.通过采用上述技术方案,检测器的设置,便于对路面材料的厚度进行检测,减少路面材料的厚度误差,提高路面的铺设质量;监测器的设置,便于对道路边沿的进行检测,提高摊铺机对路面材料铺设的精准度,降低路面材料时的重复或者遗漏的可能性。
18.可选的,所述调节装置包括用于对所述无人压路机进行导向的导航组件以及用于对所述无人压路机进行制动的制动组件,所述导航组件包括用于对无线电信号进行接收的接收机以及用于转换所述接收机信号的转换器,所述接收机通过无线电信号与所述移动基站连接,所述转换器与接收机通过线路连接,所述转换器与接收机均位于所述无人压路机上。
19.通过采用上述技术方案,制动组件的设置,便于对无人压路机进行及时制动,进而提高无人压路机的安全性;通过采用上述技术方案,接收机的设置,便于对移动基站的信号进行接收,进而便于转换器对接收的信号进行转换,进而便于调节无人压路机的运动方向,提高无人压路机的实用性。
20.可选的,所述制动组件包括传感器和双从蹄式制动器,所述传感器通过无线电信号与所述北斗定位基站连接,所述传感器通过线路与所述双从蹄式制动器连接,所述传感器和双从蹄式制动器均位于所述无人压路机上。
21.通过采用上述技术方案,传感器的设置,便于对北斗定位基站发出的信号进行接收,进而便于了解施工现场障碍物的位置,实现双从蹄式制动器的启动,降低无人压路机发生碰撞的可能性,提高无人压路机的安全性。
22.综上所述,本发明包括以下至少一种有益技术效果:
1.设计的路面基层无人驾驶机群碾压系统,通过无人压路机,便于对路面上铺设的材料进行压实,减少人工操作,进而减少对工作人员健康的损害,同时,便于延长压路机的工作时长,进而提高施工效率;2.识别组件的设置,便于对不同路况的信息进行收集,进而便于对不同路况的路面进行精准铺设,提高道路铺设质量;工业智能平板的设置,便于对路况信息进行分析,进而便于对摊铺机的铺设路径进行规划;3. 制动组件的设置,便于对无人压路机进行及时制动,进而提高无人压路机的安全性;通过采用上述技术方案,接收机的设置,便于对移动基站的信号进行接收,进而便于转换器对接收的信号进行转换,进而便于调节无人压路机的运动方向,提高无人压路机的实用性。
附图说明
23.图1是本发明实施例的整体结构示意图。
24.图2是图1的a部放大图。
25.图3是图1的b部放大图。
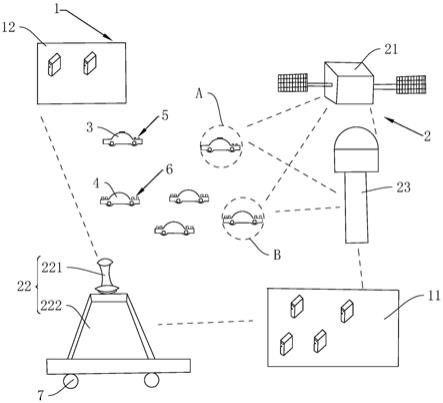
26.附图标记说明:1、监控装置;11、营地控制中心;12、现场控制中心;2、通讯装置;21、卫星;22、移动基站;221、信号塔;222、安装座;23、北斗定位基站;3、摊铺机;4、无人压路机;5、数据采集装置;51、工业智能平板;52、识别组件;521、检测器;522、监测器;6、调节装置;61、导航组件;611、接收机;612、转换器;62、制动组件;621、传感器;622、双从蹄式制动器;7、万向轮。
具体实施方式
27.以下结合附图1
‑
3对本发明作进一步详细说明。
28.本发明实施例公开一种路面基层无人驾驶机群碾压系统。参照图1,路面基层无人驾驶机群碾压系统包括用于对信号进行监控的监控装置1、用于对信号进行传输的通讯装置2、多个用于对路面材料进行铺设的摊铺机3以及多个用于对路面进行碾压的无人压路机4,本实施例中设置有两个摊铺机3、四个无人压路机4,摊铺机3上设置有数据采集装置5,无人压路机4上设置有调节装置6,无人压路机4的设置,便于对路面材料进行压实,减少人工操作,进而减少对工作人员健康的损害,同时,便于延长路面铺设的工作时长,进而缩短施工周期,提高施工效率。
29.参照图1,通讯装置2包括卫星21、移动基站22以及北斗定位基站23,卫星21用于对摊铺机3和无人压路机4进行追踪,移动基站22用于对摊铺机3和无人压路机4输出的信号进行传输,北斗定位基站23用于对卫星21传输的信号进行处理,卫星21、移动基站22和北斗定位基站23的设置,便于对无线电信号进行接收和输出,进而便于信号的处理;移动基站22包括用于接收信号的信号塔221以及用于信号塔221安装的安装座222,安装座222远离信号塔221一侧通过螺栓固定有多个万向轮7,本实施例中设置有四个万向轮7,便于安装座222的移动,进而便于信号塔221位置的调整,提高信号塔221信号传输的稳定性。
30.参照图1,监控装置1包括营地控制中心11以及现场控制中心12,现场控制中心12用于对现场施工情况进行监控,本实施例中现场控制中心12设置有两台电脑,且两台电脑
通过线路与移动基站22和北斗定位基站23连接,进而便于对移动基站22和北斗定位基站23接收的信号进行分析处理,实现对摊铺机3和无人压路机4施工情况的监控;营地控制中心11用于对现场控制中心12的数据进行监控,本实施例中营地控制中心11设置有四台电脑,便于协助现场控制中心12对数据进行处理和分析,降低现场控制中心12的数据处理压力,提高现场施工的稳定性,进而提高路面施工质量。
31.参照图1和图2,数据采集装置5包括工业智能平板51以及用于识别路面状况的识别组件52,工业智能平板51通过螺栓固定于摊铺机3的顶盖上,识别组件52包括用于检测路面铺设材料厚度的检测器521以及用于识别道路边沿的监测器522,检测器521和监测器522均与工业智能平板51通过线路连接,检测器521和监测器522均通过螺栓固定于摊铺机3上,本实施例中采用红外检测器521,提高对路面铺设材料厚度检测的精度,降低施工产上的误差;本实施例中监测器522采用雷达探测,对道路边沿线进行监测,便于摊铺机3进行材料的铺设,提高材料铺设的精度,降低路面材料重复铺设或者漏铺的情况。
32.参照图1和图3,调节装置6包括用于对无人压路机4进行导向的导航组件61以及用于对无人压路机4进行制动的制动组件62;导航组件61包括用于对无线电信号进行接收的接收机611以及用于转换接收机611信号的转换器612,接收机611通过无线电信号与移动基站22连接,接收机611通过螺栓固定于无人压路机4上,本实施例中接收机611采用gps接收机611,提高接收机611信号的接收能力,减少信号传输过程中的遗失,转换器612与接收机611通过线路连接,转换器612通过螺栓固定于无人压路机4上,本实施例中转换器612采用数据转换器612,转换器612用于将接收机611接收的信号转换成无人压路机4调整方向的信号,进而减少无人压路机4与障碍物的碰撞的可能性,提高无人压路机4施工的安全性。
33.参照图1和图3,制动组件62包括传感器621和双从蹄式制动器622,本实施例中传感器621采用光传感器621,传感器621通过无线电信号与北斗定位基站23连接,传感器621通过线路与双从蹄式制动器622连接,传感器621与双从蹄式制动器622均通过螺栓固定于无人压路机4上,传感器621的设置,便于对施工过程中的障碍物进行检测,进而便于驱动双从蹄式制动器622的启动,使得双从蹄式制动器622阻止无人压路机4的运动,进而降低无人压路机4与障碍物碰撞的可能性。
34.本发明实施例一种路面基层无人驾驶机群碾压系统的实施原理为:首先调节监测器522,对道路的情况信息进行收集,然后通过线路传递至工业智能平板51对路况进行分析,然后通过工业智能平板51调节摊铺机3针对具体路况进行材料的铺设,待摊铺机3对路面材料铺设完成后,通过检测器521对铺设材料的厚度进行检测,检测器521检测路面摊铺合格后,启动无人压路机4,使得无人压路机4对材料进行压实,通过卫星21对无线电信号传输,使得接收机611将接收的无线电信号传送至转换器612,经过转换器612将信号传递至工业智能平板51,经过工业智能平板51调节无人压路机4调整方向,实现对不同路段材料的压实;当遇到障碍物时,通过卫星21将无线电信号传递至移动信号塔221,信号塔221将信号传递传感器621,传感器621将信号传递至双从蹄式制动器622,进而使得无人压路机4停止,保证无人压路机4的安全施工。
35.以上均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。