1.本发明涉及巡检机器人技术领域,具体涉及一种单电机驱动转向和直线运动的巡检机器人负载平台。
背景技术:
2.巡检机器人是以移动机器人作为载体,以可见光摄像机、红外热成像仪等其它检测仪器作为载荷系统,以嵌入式计算机作为控制系统的软硬件开发平台,具有障碍物检测识别与定位、自主作业规划、自主越障、对线路走廊自主巡检、巡检图像和数据、后台巡检作业管理与分析诊断等功能。
3.应用于室内机房的数据中心巡检机器人,在固定的走廊按预定的规划路线行进,在到达一个控制柜的扫描位置,开启末端盒内的检测仪器,准备对此工位的数据中心控制柜进行检测。现有应用于室内机房的数据中心巡检机器人的检测仪器是通过负载平台固定安装在机器人手臂上,负载平台与巡检机器人之间无相对运动,巡检精度完全由机器人控制,由于机器人的运行会有一定的误差,机器人纠正自身误差需要耗费时间,检测的效率低;另外,由于机器人自身体积较大,无法到达角落或者极端转角位置,容易出现检测死角。
技术实现要素:
4.为解决上述技术问题,本发明提供一种单电机驱动转向和直线运动的巡检机器人负载平台。
5.本发明采用的技术方案是:
6.一种单电机驱动转向和直线运动的巡检机器人负载平台,包括负载平台本体,负载平台本体的一端通过转轴座水平可转动地安装在滑块上,滑块滑动安装在直线导轨上,直线导轨固定安装在主体齿轮盘的上侧面的中心部,主体齿轮盘的左右两侧面平行于直线导轨设置有直线齿条,主体齿轮盘的前侧面设置有圆弧齿条,圆弧齿条与两直线齿条连接成组合齿条;负载平台本体的另一端固定安装有电机,电机的输出轴竖直向下穿过主体齿轮盘固定套装有齿轮,齿轮与组合齿条啮合传动连接,电机驱动齿轮沿组合齿条的一端运动到另一端时,带动负载平台从主体齿轮盘的后侧直线运动到主体齿轮盘的前侧,然后转向180
°
再从从主体齿轮盘的前侧直线运动到主体齿轮盘的后侧;主体齿轮盘的后侧面固定安装在旋转支座的一端,旋转支座的另一端转动连接固定支座,固定支座用于固定连接巡检机器人。
7.进一步地,主体齿轮盘的上侧面开设有内导向槽,内导向槽由位于直线导轨两侧的相平行的两个内直线导向槽和连接两个内直线导向槽且与圆弧齿条同心设置的内圆弧导向槽组成,负载平台本体的靠近转轴座的一端设有内导向轴,内导向轴上固定套装有内导向轴承,内导向轴承与内导向槽的外侧壁滚动接触。
8.进一步地,滑块底部两侧设有限位部,限位部与内导向轴均位于内导向槽内且滑块限位部的底部低于内导向轴承的底面,内直线导向槽的前端设有限位槽口,所述限位槽
口用于限定滑块的滑动。
9.进一步地,主体齿轮盘的上侧面开设有外导向槽,外导向槽位于内导向槽的外侧,外导向槽由平行于直线导轨的两个直线外导向槽和连接两个直线外导向槽且与圆弧齿条同心设置的外圆弧导向槽组成,负载平台本体的靠近电机的一端设有外导向轴,外导向轴上固定套装有外导向轴承,外导向轴承与外导向槽的外侧壁滚动接触。
10.进一步地,转轴座设于负载平台本体上,转轴座内通过深沟球轴承可转动设有转轴,转轴的下端与滑块固定连接,转轴上端伸出转轴座通过锁紧螺母与深沟球轴承的轴承内圈固定连接。
11.进一步地,转轴为空心轴,转轴空腔内用于通过导线。
12.本发明的有益效果:
13.1、本技术结构紧凑,由单电机控制即可实现水平旋转和直线运动,从而使本技术的负载平台的维护和控制更为简单,实现方式更加可靠,制造成本更低。
14.2、当电机在直线段运行时可以来回调整负载平台所处的位置,当经过圆弧段旋转至另一直线段时,也可以相同的模式运行,并且可以在任意位置停止电机,进行检测,从而形成本技术在平面内全方向无死角巡检。
15.3、本技术能够完整准确的读取各位置面板上的信号,具有高精度、高稳定性、易控制等技术特点。
16.4、本技术均为滚动摩擦,机构本身磨损小,且没有复杂的辅助控制机构,更经久耐用。
附图说明
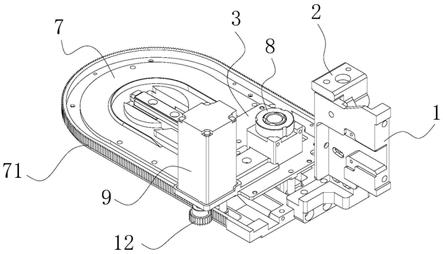
17.图1是本发明的巡检机器人负载平台的立体结构示意图一。
18.图2是本发明的巡检机器人负载平台的立体结构示意图二。
19.图3是本发明的巡检机器人负载平台的局部剖视图。
20.图4是本发明的主体齿轮盘的立体结构示意图。
21.图5是本发明的旋转支座的立体结构示意图。
22.图6是本发明的滑块与转轴的立体连接结构示意图。
23.主要附图标记:
24.1.固定支座;2.旋转支座;3.负载平台本体;41.直线导轨;42.滑块;5.转轴座;6.深沟球轴承;7.主体齿轮盘;8.锁紧螺母;9.电机;10.转轴;12.齿轮。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图及一种优选的实施方式对本发明的技术方案进行清楚、完整地描述。
26.实施方式1
27.参阅图1~图6,本实施例提供一种单电机驱动转向和直线运动的巡检机器人负载平台,包括固定支座1、旋转支座2、主体齿轮盘3、直线导轨41、滑块42、转轴座5、负载平台本体7、
28.负载平台本体7的一端通过转轴座5水平可转动地安装在滑块42上,滑块42滑动安
装在直线导轨41上,直线导轨41固定安装在主体齿轮盘7的上侧面的中心部,主体齿轮盘7的左右两侧面平行于直线导轨41设置有第一直线齿条71和第二直线齿条72,主体齿轮盘7的前侧面设置有圆弧齿条73,第一直线齿条711、圆弧齿条713、第二直线齿条712顺次连接成组合齿条71;负载平台本体7的另一端固定安装有电机9,电机的输出轴竖直向下穿过主体齿轮盘固定套装有齿轮12,齿轮12与组合齿条71啮合传动连接,电机9驱动齿轮12沿组合齿条71的一端运动到另一端时,带动负载平台3从主体齿轮盘7的后侧直线运动到主体齿轮盘的前侧,然后转向180
°
再从从主体齿轮盘的前侧直线运动到主体齿轮盘的后侧;主体齿轮盘7的后侧面固定安装在旋转支座2的下端,旋转支座2的上端转动连接固定支座1,固定支座1用于固定连接巡检机器人。
29.固定支座1固定于巡检机器人的升降机构上,旋转支座2的上端设有铰接孔21,固定支座1设有铰接轴,旋转支座2与固定支座1通过铰接轴与铰接孔21配合转动连接,采用该设计可以通过转动来调整旋转支座2的安装角度,从而保证负载平台本体7的水平,调平整后通过螺钉锁紧即可。
30.在本实施中,转轴座5与负载平台本体7一体设计,转轴座5内通过深沟球轴承6可转动设有转轴10,转轴10的下端与滑块42固定连接,转轴10上端伸出转轴座5通过锁紧螺母8与深沟球轴承6的轴承内圈固定连接。优选转轴10为空心轴,转轴空腔内用于通过导线。线束与运动部分相对隔离,对线束形成保护。
31.在本实施中,主体齿轮盘7上侧面的中心部设有导轨安装部74,导轨安装部74的两侧开设有内导向槽72,内导向槽72由平行于直线导轨41的的两个内直线导向槽和连接两个内直线导向槽且与圆弧齿条713同心设置的内圆弧导向槽组成;负载平台本体3的靠近转轴座5的一端设有内导向轴31,内导向轴31上固定套装有内导向轴承311,内导向轴承311与内导向槽72的外侧壁滚动接触。
32.滑块42底部两侧设有四个支柱状限位部421,四个限位部421两两分布在直线导轨41的两侧,限位部421的内侧面滑动贴合直线导轨41的侧面。滑块限位部421与内导向轴72均位于内导向槽72内,内导向轴72位于滑块限位部421的前侧。滑块限位部421的底部低于导向轴承721的底面,内导向槽72的直线导向段的前端设有限位槽口721,即内直线导向槽的底面低于内圆弧导向槽的底面。当齿轮12从内直线导向槽进入内圆弧导向槽时,通过限位槽口721限制滑块42的运动,从而使电机9带动负载平台3绕转轴10转动,使其进入圆弧段。
33.主体齿轮盘7上侧面开设有外导向槽73,外导向槽73位于内导向槽72的外侧,外导向槽73由平行于直线导轨41的两个直线外导向槽和连接两个直线外导向槽且与圆弧齿条713同心设置的外圆弧导向槽组成,负载平台本体7的靠近电机10的一端设有外导向轴32,外导向轴32上固定套装有外导向轴承321,外导向轴承321与外导向槽73的外侧壁滚动接触。在本实施例中,外导向轴32共设有两个,两个外导向轴32沿电机9的输出轴对称分布。
34.通过内导向轴31与内导向槽72配合,外导向轴32与外导向槽73配合,以及滑块42与直线滑轨41的配合,使得电机9驱动齿轮12沿组合齿条71的一端运动到另一端时,负载平台3可以稳定的从主体齿轮盘7的后侧直线运动到主体齿轮盘的前侧,然后转向180
°
再从从主体齿轮盘的前侧直线运动到主体齿轮盘的后侧,从而实现平面内全方向无死角巡检。
35.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人
员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。