装载洗碗机的系统、用于装载的抓具和洗碗机
1.本发明总体涉及工业洗涤的领域。尤其,本发明涉及一种用于对洗碗机进行装载的系统,该洗碗机被实施为尤其商业上的输送式洗碗机。
2.本发明还涉及一种尤其用于给洗碗机自动装载洗涤物件的装载组件的抓具系统、以及一种具有对应的装载系统的输送式洗碗机。
3.输送式洗碗机应用于商业领域。不同于在清洁期间将要清洁的碗碟位置固定地保持在机器中的家用洗碗机,在输送式洗碗机中将洗涤物件输送经过机器的不同的处理区。
4.在输送式洗碗机中,将洗涤物件洗涤物件洗涤物件(诸如托盘、碗碟、盆、玻璃杯、刀叉和其他要清洁的用具)传送经过多个处理区,例如(多个)预清洗区、(多个)主清洗区、(多个)后清洗区或预冲洗区、(多个)冲净区以及(多个)烘干区。为了沿输送方向将洗涤物件输送经过输送式洗碗机而使用输送装置,该输送装置一般来说具有用于容纳洗涤物件的格室。在带式输送式洗碗机中,这些格室可以通过输送装置的输送带上的支承指形成。在架式输送式洗碗机中,碗碟架用作输送装置,在这些碗碟架中可以形成用于容纳要处理的洗涤物件的格室。在此可设想的是,通过输送装置将碗碟架输送经过架式输送式洗碗机。
5.通常先对要清洁的洗涤物件进行预分类,然后再将其放置到输送带中。例如从文献us 6,530,996 b2已知一种架式输送式洗碗机,在该架式输送式洗碗机中将要处理的洗涤物件在碗碟架中预分类,然后将其供应给相应的处理区。
6.输送式洗碗机尤其用于餐厅和自助餐厅等大型设施,以尽可能经济地清洁大量脏污的洗涤物件。借助目前已知类型的输送式洗碗机可以每小时清洁数百套餐具。研究表明:平均来算,每套餐具一般由托盘、盘子、一至两个小碗、饮用玻璃杯以及一套刀叉构成。
7.在几乎所有诸如企业自助餐厅或餐厅的大型厨房中,就餐者所使用过的洗涤物件(碗碟、饮用玻璃杯、刀叉等)都在托盘上被送回。从交还站将餐具套件输送到洗涤区域。通常借助对应的供应传送带来输送这些餐具套件。借助从交还站到洗涤区域的传送带将餐具套件直接运送至输送式洗碗机的装载区域。
8.随后在输送式洗碗机的装载区域或送入区域中,操作人员通常手动地移除洗涤物件并且将其分类到输送式洗碗机的输送带中。
9.针对托盘或托盘状物体,通常以如下方式进行预分类:操作人员手动地从要清洁的托盘移除碗碟套件和刀叉套件,并且随后在输送装置之前或者在输送式洗碗机的送入区域(脏污侧)中将托盘摞起来。这个成摞托盘中的托盘仅与其它托盘一起、时不时地被放置到输送式洗碗机的输送带中并且进行清洁。
10.这种同类型过程具有如下优点:托盘不能将喷射阴影投射到在该托盘后方堆叠的较小的洗涤物件上。此外,相比将洗涤物件与要清洁的托盘混在一起,这个过程使得成摞和解除成摞的工作流程更为简单和更高效。
11.然而,在这个成摞托盘中的托盘类型仅与其它托盘一起被放置到输送式洗碗机的输送带中并且进行清洁期间不能清洁其他洗涤物件(诸如盘子、小碗或其他碗碟),这是因为要放置到输送带中的托盘通常必须横向于输送方向地被放置到输送带中并且因此占满输送带的可供使用的整个面。因此与其他类型的洗涤物件相比,必须耗费相对大量的时间
来清洁托盘。
12.此外,位于机器入口处的输送式洗碗机的操作人员必须将每个托盘分两次纳入到其工作流程中:第一次是从要清洁的托盘移除刀叉件和碗碟件,并且第二次是将托盘实际放置到输送式洗碗机的输送带中。
13.在所描述的工作过程中人力消耗是特别高的。必须单独手动地从托盘移除每套餐具的每个洗涤物件(碗碟件)并且将其放置到洗碗机的输送带中。
14.此外,必须手动地从托盘中移除每套餐具的各个刀叉件并且同样将其供应给输送式洗碗机。随后对实际的托盘进行前述处理。
15.在每小时数千个盘子的机器处理能力的情况下,尽可能快速且高效地工作是尤其重要的,由此增加了操作人员的身体负担。
16.基于上述情况,本发明的基本目的在于,给出一种针对本文开篇提及类型的输送式洗碗机的解决方案,在该解决方案中可以将整个清洗过程和冲洗过程设计得更高效,由此尤其可以缩短冲洗人员的工作时间并降低洗碗机的资源消耗。
17.这个问题根据本发明尤其通过独立专利权利要求1的主题来解决,其中根据本发明的装载系统的有利的进一步改进方案在对应的从属专利权利要求中给出。
18.因此,本发明尤其涉及一种用于对尤其商业上的输送式洗碗机进行优选自动或至少半自动的装载的系统,其中根据本发明的装载系统具有用于将洗涤物件供应给输送式洗碗机的装载区域的供应传送带以及用于给输送式洗碗机优选自动装载洗涤物件的装载组件。
19.根据本发明,在被背景下尤其提出的是,该装载组件具有抓具系统,该抓具系统带有至少一个平行抓具,其中该至少一个平行抓具有至少两个夹爪,在这些夹爪之间限定该平行抓具的抓取区域。
20.具有至少一个平行抓具的抓具系统(至少原则上)一般来说例如从抓具技术方面已知为eoat装置(eoat=end
‑
of
‑
arm
‑
tool,臂端工具)并且通常与工业机器人结合地被用于操作物体/零件/工件。通常,这样的eoat装置具有至少两个钳状的抓取爪,它们相对彼此可枢转的或沿适合的引导件线形地相对彼此可移位,并且以朝向彼此的抓具面从相反侧开始抓住并且夹紧要抓取的物体或要抓取的零件/工件。
21.由此,这样的eoat装置履行感测和保持的功能并且在机器人臂与工件/物体/零件之间建立连接。在此,对可靠的连接起决定性作用的是作用对(wirkpaarung)的类型和接触平面的数量。作用对可以通过力配对、形状配对或材料配对来实现。在使用力配对的情况下,通过向工件表面施加压力来产生保持。相比之下,在形状配对的情况下通过对工件的同形包络来进行保持。
22.尽管具有平行抓具的抓具系统一般来说可以是从制造工业中特别是在装配中已知的,但是这样的抓具系统无法或者至少无法容易地被用作用于优选地给洗碗机自动装载洗涤物件的装载组件的一部分。这尤其是由于:常见的、被实施为eoat装置的抓具系统尤其是针对要操纵的抓取物的形状和位置以及取向而专门设计的。因此,常见的、被实施为eoat装置的抓具系统例如在装配时通常用于在特定的、预先确定的抓取位置处抓住具有特定尺寸和形状的预先确定的抓取物,以便然后将抓取物安置到其他的、预先确定的位置处。在此,抓具系统尤其是针对要操纵的抓取物而设计的,尤其是针对抓取物的尺寸、形状和材料
而设计的。
23.抓具系统的针对抓取物定制的这种设计在用于给输送式洗碗机自动装载洗涤物件的装载组件中是不可行的。对此的原因在于:必须设计有输送式洗碗机的自动工作式的装载组件,使得该装载组件能够操作多种不同类型的洗涤物件(尺寸、形状、重量和材料不同),以便可以实现对输送式洗碗机的自动装载。
24.换言之,在商业上的冲洗中,无法使用对于要操纵的洗涤物件而言经优化的抓具系统来给输送式洗碗机自动装载洗涤物件。相反,该抓具系统必须被设计成能够操作多种不同类型的洗涤物件(例如小盘子、大盘子、碗、钵、玻璃杯等)。
25.恰好在此,本发明构思并提出:该装载组件具有抓具系统,该抓具系统带有至少一个平行抓具,其中该至少一个平行抓具有至少两个夹爪或抓指,在这些夹爪或抓指之间限定该平行抓具的抓取区域。为了可以用平行抓具来操作不同的洗涤物件类型,尤其不同大小的和/或不同形状的洗涤物件,根据本发明提出的是:平行抓具的该至少两个夹爪/抓指中的至少一个夹爪/抓指被分段成使得该至少一个夹爪/该至少一个抓指能够至少局部地适形于由该至少一个平行抓具要抓取的洗涤物件的表面轮廓。
26.通过这种措施可以实现能够用该平行抓具来操纵多种不同的洗涤物件类型。由此,根据本发明的装载系统适合用于对尤其商业上的输送式洗碗机进行优选自动的或至少半自动的装载。
27.由于平行抓具具有能够至少局部地适形于于由该平行抓具要抓取的洗涤物件的表面轮廓的至少一个夹爪或至少一个抓指,因此该平行抓具可以可靠地履行感测并保持不同的洗涤物件的功能。
28.由于作用对的可能类型和借助平行抓具可行的接触平面的数量,在平行抓具与要操纵的洗涤物件之间的可靠连接是可能的实现。作用对在此尤其通过力配对和形状配对的组合来实现。
29.换言之,通过向洗涤物件表面上施加压力来实现藉由平行抓具保持洗涤物件。同时,由于形状配对而实现通过对洗涤物件的尤其局部地同形包络进行保持。
30.优选地,审慎地提出一种能够被电动机式的驱动装置致动的平行抓具作为装载组件的抓具系统的操纵装置,尽管这种电动机驱动的平行抓具在用于抓取并操作抓取件的抓具技术方面并不常见。相反,在抓具技术方面为此目最初提出的是气动地被驱动的操纵装置(尤其呈所谓的吸入式抓具的形式)来操作抓取件。
31.这样的吸入式抓具通常被用于吸住物体、抬升物体并且能够将物体带到其他地点。为此,吸入式抓具通常具有至少一个挠性的吸盘,该至少一个吸盘界定能够连接至真空源的吸入空间并且具有环绕吸入开口的前端区域和相反的后端区域。吸盘的吸入开口通常形成有密封唇,该密封唇贴靠或可附接至要操作的物体的表面并且然后围住吸盘与物体的表面之间的吸入空间,该吸入空间可以对应地被抽成真空。由此,吸盘紧密地贴靠物体的表面并且气动地将该物体保持在位。
32.然而,在冲洗技术方面使用这样的吸入式抓具时,已经表明在这种吸入式抓具不适合操作洗涤物件,这是因为尤其在操作脏污的洗涤物件的情况下存在如下危险:在将吸入空间抽成真空时,存在于要操作的洗涤物件(如盘子和小碗)上残留的食物残渣等堵塞与该吸入空间气动相连的真空管路,使得不再确保可靠地抓取洗涤物件。
33.从抓具技术方面还已知气动地被致动的抓取钳。
34.但是,即便这样的钳也仅能够有限程度地在输送式洗碗机的装载区域中用作操纵装置(如果非要这样的话),这是因为抓取钳通常仅具有限的抓取区域,这无法可靠地抓取较大的洗涤物件(例如盘子、瓷杯或碗)。
35.可以看到从抓具技术方面已知的气动地被致动的抓取钳的另一缺点是,这些抓取钳需要压缩空气作为工作介质,而在洗涤区域中通常没有压缩空气供应。
36.此外,气动地被驱动的抓取钳通常仅可以允许两个位置,即打开位置和闭合位置,这妨碍气动地被致动的抓取钳可以被用于多种不同的洗涤物件类型(尤其不同的尺寸和/或不同的形状)。
37.出于这个原因,根据本发明作为操纵装置优选提出电动机式地被驱动的平行抓具来给输送式洗碗机自动装载洗涤物件。在这种平行抓具中,相关的夹爪/抓指是可借助电动机式的驱动装置在平行抓具的抓取区域上至少部分地调整的。
38.可以看到在使用电动机式地被驱动的平行抓具的情况下的另一优点是:被实施为平行抓具的操纵装置可以以易于实现的方式被实施有自锁机构,从而使得该操纵装置在无应力的状态下固持所抓取的洗涤物件,而不会转移至打开位置。
39.尽管如此,然而本发明并不局限于其夹爪/抓指借助于电动机式的驱动装置能够进行调节的平行抓具。相反,本发明一般来说涉及其夹爪(不管以任何方式)能够进行自动调节的平行抓具。
40.借助根据本发明的装载系统可以明显减少用于对输送式洗碗机进行装载所需的手动操作步骤,这是因为能够借助于抓具系统以高效的方式不仅将盘子、而且将小碗或玻璃杯或其他洗涤物件自动分类到输送式洗碗机中。
41.因此,通过这种方式能够总体上节省手动的工作步骤并且因此节省冲洗人员的工作耗费,这是因为冲洗人员在理想情况下不必再对输送式洗碗机进行手动装载。尤其,根据本发明的装载系统确保输送式洗碗机的最符合人体工程学的并且对使用者友好型的操作,这是因为不再需要将洗涤物件并且尤其是盘子或瓷杯或小碗手动装载到输送式洗碗机中。
42.此外,借助根据本发明的装载系统改善了洗碗机的清洁结果,这是因为借助于装载组件可以在输送式洗碗机的对应指配的输送带或对应指配的输送轨道上对所确定的或可确定的洗涤物件组的所有洗涤物件进行自动分类。
43.此外可以简化卸载过程,这是因为可以在限定的输送轨道或限定的输送带上将每个洗涤物件组输送经过输送式洗碗机并且尤其已经以预先分类的方式到达输送式洗碗机的卸载区域。
44.为了可以根据预先确定或固定的洗涤物件组对藉由根据本发明的装载系统的供应传送带被供应给输送式洗碗机的装载区域的洗涤物件进行分类,可设想的是:根据本发明的装载系统具有洗涤物件探测器装置,该洗涤物件探测器装置用于捕获藉由供应传送带所供应的洗涤物件的类型(盘子、瓷杯、小碗等)并且然后借助该至少一个平行抓具专门地将某一洗涤物件类型从供应传送带抬升并且将其分类到输送式洗碗机的对应的输送轨道中。
45.本文使用的术语“洗涤物件探测器装置”应理解为任何如下探测装置,这些探测装置被设计成用于检测或确定藉由供应传送带供应的洗涤物件的类型。在此尤其可设想的
是:洗涤物件探测器装置具有至少一个探测器器件,借助该至少一个探测器器件可以确定藉由供应传送带供应的洗涤物件的尺寸、形状和/或材料。
46.根据可以设想的实现方式,洗涤物件探测器装置可以具有至少一个优选光学式、电感式或电容式工作的探测器器件,从而可以确定对应的洗涤物件的尺寸、形状和/或材料,以识别洗涤物件类型。但是还可以考虑其他的探测器类型作为探测器器件,例如电感式工作的接近传感器、光传感器、光幕、激光扫描仪、3d激光器、摄像头、旋转编码器等。
47.由于装载组件的抓具系统具有至少一个平行抓具,因而确保了:除了刀叉件之外,可以对应地操纵几乎所有其他的洗涤物件类型,即尤其可以从供应传送带移除并且可以将其分类到输送式洗碗机的优选预先确定的输送轨道中。
48.与抓取钳不同,平行抓具的作用原理是基于以下事实:平行抓具具有至少两个夹爪/两个抓指,这些夹爪/抓指是以线形运动的方式相对于彼此可移动的。例如在此背景下可设想的是,平行抓具的该至少两个夹爪/抓指中的至少一个夹爪/抓指是可以藉由一种“柱塞”被移动或驱动的。
49.然而替代于此还可设想的是,选择一种线性驱动装置作为电动机式的驱动装置。替代于此,还可以将由电动机式的驱动装置按照需要所产生的转矩经由齿轮组件传递到该至少一个夹爪/该至少一个抓指上。
50.为了优化平行抓具的可靠性,在本发明的实施方式中提出的是,该抓具系统或该至少一个从属于抓具系统的平行抓具设有传感器系统,借助该传感器系统可以检测或者能够检测洗涤物件相对于平行抓具的抓取区域的正确的相对位置以及洗涤物件的存在、可以由平行抓具控制对洗涤物件的准确操纵、或者可以检查对应的处理参数。
51.在此可以看到对现有技术的显著贡献在于,平行抓具的该至少两个夹爪中的至少一个夹爪是经分段的。
52.换言之,该至少一个(经分段的)夹爪由至少两个区段(部段)构成,这些区段是相对于彼此可活动且尤其可枢转的。通过这种分段,(经分段的)的夹爪可以可变地适形于由该至少一个平行抓具要抓取的洗涤物件的表面轮廓。
53.对于特别敏感的洗涤物件(例如酒杯等)而言,该至少一个的夹爪的较精细的分段是有利的,以便可以借助于平行抓具主要通过形状配对来操纵该洗涤物件。然而本发明并不局限于其中至少一个夹爪被分段成多于两个区段的平行抓具。
54.优选地,经分段的夹爪的该至少两个部段藉由铰接区域并且尤其旋转铰接区域相连接,其方式为:经分段的该至少一个夹爪的这些部段或这些部段中的至少一个部段是尤其按照需要在朝向抓取区域的方向上和/或在相反的方向上可活动且尤其可枢转的。
55.根据本发明的解决方案的优选实现方式提出的是:装载组件的抓具系统的该至少一个平行抓具具有抓具壳体,在该抓具壳体中至少局部地容纳有或可容纳有用于平行抓具的该至少两个夹爪中的至少一个夹爪的驱动装置。在此,该驱动装置指配有相对于该抓具壳体可移动且尤其可滑动的滑块元件。
56.在此实施方式中尤其提出的是:平行抓具的经分段的该至少一个夹爪与相对于抓具壳体可移动并尤其可滑动的滑块元件一起相对于壳体可移动且尤其可滑动。
57.优选地,除了经分段的该至少一个夹爪之外,平行抓具还具有尤其被设计为抓指的夹爪,该夹爪与抓具壳体刚性地相连接。
58.在此背景下,术语“与抓具壳体刚性地相连接”意味着:在致动滑块元件时,尤其被设计为抓指的这个夹爪不会相对于抓具壳体移动,尤其不会滑动。
59.根据替代性的实施方式,平行抓具的每个夹爪都指配有滑块元件,从而使得按照需要每个夹爪都可以相对于抓具壳体且相对于其他的夹爪可移动且尤其可滑动。
60.原则上有利的是,平行抓具的该至少两个夹爪具有自行定中的功能。为了以特别简单、但尽管如此仍有效率的方式实现这一点,根据本发明的装载系统的设计变例提出的是:该平行抓具具有至少两个且优选恰好两个、尤其被设计为抓指的夹爪,这些夹爪各自与该抓具壳体刚性地相连接,并且这些夹爪彼此并排地布置在与该滑块元件的移动方向垂直地延伸的线上。
61.通过平行抓具的这种易于实现的实现方式确保通过三点式定位方法由平行抓具的夹爪抓住洗涤物件。由于平行抓具的至少经分段的夹爪能够相对于被设计为抓指的其他夹爪并且相对于由抓具系统要抓取的洗涤物件移动,因此可以自动地实现自行定中的功能。
62.根据替代性的实施变例提出的是:该至少一个平行抓具具有抓具壳体,在该抓具壳体中容纳有或能够容纳有用于平行抓具的该至少两个夹爪中的至少一个夹爪的驱动装置,其中该驱动装置指配有相对于该抓具壳体能够移动且尤其能够滑动的滑块元件。在这个替代性的实施变例中,经分段的该至少一个夹爪与抓具壳体刚性地相连接,而平行抓具的优选被设计为抓指的至少一个另外的夹爪是随着滑块元件相对于抓具壳体可移动且尤其可滑动的。
63.为了即使在此实施变例中也可以实现平行抓具的自行定中的功能,根据刚才提及的实施变例的改进方案提出的是:该平行抓具具有至少两个且优选恰好两个另外的、并且尤其被设计为抓指的夹爪,这些夹爪是各自随着该滑块元件相对于该抓具壳体能够移动并且尤其能够滑动的,其中该至少两个且优选恰好两个另外的、被设计为抓指的夹爪彼此并排地布置在与该滑块元件的移动方向垂直地延伸的线上。
64.为了实现平行抓具的经分段的该至少一个夹爪,可以考虑各种解决方案。
65.根据一个实施变例,经分段的该至少一个夹爪被实施为具有抓指的角抓具且尤其单指式角抓具,其中该角抓具的抓指按照需要能够枢转入该平行抓具的抓取区域中并且能够从该平行抓具的抓取区域枢转出来。
66.当然在此背景下可设想的是,角抓具的抓指具有藉由各自的铰接区域相对于彼此可枢转的多个部段/抓指。
67.在刚才提及的实施变例中,其中经分段的该至少一个夹爪被实施为具有抓指的角抓具且尤其为单指式角抓具,该夹爪原则上是混合式解决方案,即由平行抓具和角抓具的组合。通过这种混合式解决方案,平行抓具的应用范围明显拓宽,这是因为借助平行抓具可以可靠地抓住不同类型的洗涤物件且尤其抓住具有不同表面轮廓的洗涤物件。
68.角抓具优选具有第一部段/第一区域,该第一部段/第一区域或者是与平行抓具的抓具壳体刚性地相连接的、或者是藉由平行抓具的滑块元件相对于平行抓具的抓具壳体在抓取区域的方向上或在相反的方向上可移动的。在这个第一部段处设有可枢转地铰接的抓指(第二部段),该抓指与指配给角抓具的驱动装置处于操作性联接,使得角抓具能够在朝向抓取区域的方向上选择性地且优选可变地在第一位置(例如与平行抓具的抓取区域平
行)与第二位置(尤其倾斜于或横向于第一位置)之间进行枢转。
69.然而,为了实现平行抓具的经分段的该至少一个夹爪,可设想的是:该至少一个平行抓具的经分段的该至少一个夹爪被设计成:由于优选至少局部地在经分段的该夹爪中形成的流体暴露并且优选对至少一个压缩空气腔室的压缩空气暴露,经分段的该夹爪的至少一个部段是尤其按照需要在朝向该抓取区域的方向上和/或在相反的方向上能够活动并且尤其能够枢转的。
70.为了优化角抓具的功能,根据实施变例提出的是:在角抓具的抓指处设有传感系统,该传感系统检测捕获抓指相对于角抓具的第一部段的偏转和/或捕获借助抓指对洗涤物件所施加的压力。
71.替代于作为经分段的夹爪的角抓具或作为其附加,可设想的是:经分段的该至少一个夹爪具有在朝向抓取区域的方向上被预张紧的、尤其弹性的且优选弹簧弹性的区域,在抓取洗涤物件时该区域抵抗该预张紧而压靠该洗涤物件。
72.通过设置这种弹性的且尤其弹簧弹性的区域可以实现最佳的形状配对(即在多种不同类型的洗涤物件的情况下),其中同时通过调整弹性区域的预应力可同时调整或可限定作用于洗涤物件的最大保持力。
73.有利地,经分段的夹爪的经预张紧的区域至少局部地具有针对平行抓具的抓取区域而言呈凸状的形状。
74.根据本发明的装载系统的实施方式提出的是,平行抓具的夹爪至少局部地被覆有弹性材料。
75.通过给夹爪被覆弹性材料确保了:要抓取的洗涤物件(被抓取在平行抓具的该至少两个夹爪之间)不被损坏,和/或夹爪受到保护。尤其当应抓取特别敏感的洗涤物件(例如玻璃杯)时,这是特别有利的。
76.有利地,平行抓具的夹爪至少局部地被覆有弹性体。还可以考虑将经混合的氢化丁腈橡胶(hnbr)作为弹性材料。
77.hnbr材料具有如下优点,即这种材料由于缺少双键而极具惰性。由此提高了材料的耐久性。此外hnbr材料是相对耐高温的,由此被覆有hnbr的夹爪可以例如在高达例如150℃的温度下工作或者可以与具有高达150℃的温度的洗涤物件进行接触。
78.尤其可设想的是:使弹性材料固化到夹爪上以形成由弹性材料的覆层,或者通过注塑模制工艺用弹性材料来使夹爪成型。
79.术语“固化”尤其意味着在弹性材料与夹爪的材料之间设置中间层。中间层是适合的粘合剂,以便可以将弹性材料与夹爪的材料牢固连接并且尤其防止弹性材料变得多孔。
80.在用弹性材料来使夹爪成型时优选使用注塑模制工艺,其中将夹爪插入模具中并且将弹性材料以流体状态浇入到模具中,从而使得弹性材料填满注塑成型模具与夹爪之间的空隙。弹性材料随后在模具中固化。随后可以移除模具并取出由弹性材料形成的夹爪。
81.根据刚才提及的方面的改进方案提出的是,平行抓具的夹爪各自具有至少一个横向孔。藉由在夹爪的区域中的该至少一个横向孔实现改善在给夹爪被覆弹性材料时对该弹性材料的保持。特别是与夹爪没有进一步结构化或改型(即大体上光滑)的情况下相比,尤其改善了弹性材料在夹爪上的保持。在此尤其提出的是,弹性材料遮盖该至少一个横向孔。
82.本发明在任何情况下都不局限于其中使用仅具有两个夹爪的至少一个平行抓具
的装载系统。相反,本发明还涉及具有多个平行抓具的装载系统,这些平行抓具各自具有总计三个夹爪,这些夹爪是相对于彼此且相对于由抓具系统要抓取的洗涤物件可移动的,其中这三个夹爪的移动是优选同步的。
83.有利地,平行抓具的夹爪被设计成用于通过摩擦锁止和/或形状锁止来抓取要抓取的洗涤物件。
84.此外,根据本发明的装载系统的优选实现方式提出的是:为了致动平行抓具的该至少两个夹爪中的至少一个夹爪,平行抓具指配有具有自锁机构的电动机式的驱动装置,其中该自锁机构被实施成使得电动机式的驱动装置在无电压的状态下固定夹爪相对彼此的距离。
85.本发明还涉及一种用于给洗碗机自动装载洗涤物件的装载组件的抓具系统,其中该抓具系统具有平行抓具,该平行抓具带有相对于彼此能够移动并且尤其能够滑动的至少两个抓取爪,其中这些抓取爪中的至少一个抓取爪被实施为单指式角抓具。
86.在根据本发明的抓具系统中,先前结合装载系统所提及的进一步改进方案同样是可设想的。
87.此外,本发明涉及一种输送式洗碗机,该输送式洗碗机具有至少一个输送装置(优选呈至少一个输送带的形式),其中该输送式洗碗机在其进入区域中设有至少一个前述的根据本发明所述类型的装载系统以用于优选地将洗涤物件自动放置到该输送式洗碗机的输送装置中。
88.下面将参考附图更详细地描述本发明解决方案的示例性实施方式。
89.在附图中示出:
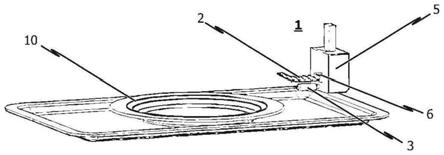
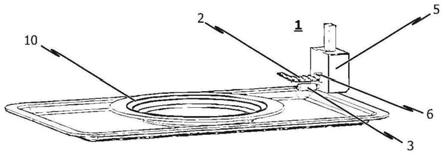
90.图1示意性地并且以等距视图示出用于对洗碗机进行自动装载的装载组件的抓具系统的第一示例性实施方式,即在抓具系统的平行抓具移动以从放在托盘上的盘子侧面抓取盘子的状态下;
91.图2示意性地并且以等距视图示出根据图1的抓具系统,即在抓具系统的平行抓具已抓取到盘子的状态下;
92.图3示意性地并且以截面视图示出根据图2的抓具系统;
93.图4示意性地并且以等距视图示出根据本发明的抓具系统的第一示例性实施方式,在应由抓具系统的平行抓具抓取放在托盘上的小碗并且平行抓具从上方向小碗移近的状态下;
94.图5示意性地并且以等距视图示出根据图4的抓具系统,即在抓具系统的平行抓具已抓取到小碗的状态下;
95.图6示意性地并且以侧视图示出根据图5的抓具系统;
96.图7示意性地并且以等距视图示出根据本发明的抓具系统的第二示例性实施方式,即在抓具系统的平行抓具从放在托盘上的盘子侧面向盘子移近的状态下;
97.图8示意性地并且以局部截面视图示出根据图7的抓具系统,即在抓具系统的平行抓具已抓取到盘子的状态下;
98.图9示意性地并且以等距视图示出根据本发明的抓具系统的第二示例性实施方式,即在抓具系统的平行抓具从上方向放在托盘上的小碗移近的状态下;
99.图10示意性地并且以局部截面视图示出根据图9的抓具系统,即在抓具系统的平
行抓具已抓取到小碗的状态下;
100.图11示意性地并且以等距视图示出根据本发明的抓具系统的第三示例性实施方式,即在抓具系统的平行抓具从上方向放在托盘上的小碗移近的状态下;以及
101.图12示意性地并且以等距视图示出根据本发明的抓具系统的第三示例性实施方式,即在抓具系统的平行抓具从放在托盘上的盘子侧面向盘子移近的状态下。
102.下面将参考图1至图12的图示来描述从属于装载组件的抓具系统的平行抓具1的各种实施方式。
103.所有实施方式都具有共同点,即装载组件的抓具系统具有平行抓具1,其中平行抓具1的至少一个夹爪2、3被实施为经分段的夹爪2,这允许该夹爪2至少局部地适形于由平行抓具1要抓取的洗涤物件10、11的表面轮廓。
104.具体地,在根据本发明的解决方案的在附图中示出的实施方式中提出的是:平行抓具1的经分段的该至少一个夹爪2被划分成至少两个且优选多于两个、相对于彼此可移动且尤其可枢转的部段2.1、2.2,其中每个部段2.1、2.2都藉由铰接区域4且尤其旋转铰接区域与相邻的部段2.1、2.2相连接,使得经分段的夹爪2的部段2.1、2.2尤其按照需要在朝向抓取区域的方向上和/或在相反的方向上可活动且尤其可枢转。
105.在图1至图6中示出的平行抓具1的实施方式的特征在于,平行抓具1具有抓具壳体5,在该抓具壳体中至少局部地容纳有或可容纳有用于平行抓具1的该至少两个夹爪2、3中的至少一个夹爪的驱动装置。
106.在此,驱动装置指配有相对于抓具壳体5可移动且尤其可滑动的滑块元件6,其中经分段的夹爪2是随着滑块元件6相对于抓具壳体5可移动且尤其可滑动的。
107.平行抓具1的其他的(未经分段的)夹爪3在此被设计为抓指,该抓指与平行抓具1的抓具壳体5刚性地相连接。
108.一方面,通过适当地致动平行抓具1的滑块元件6,平行抓具1的可实现的抓取区域发生变化。另一方面,通过将随着滑块元件6可移动的夹爪设计为经分段的夹爪2,可以实现在已抓取的状态下夹爪2自动或自主地、至少局部地适形于由平行抓具1抓取到的洗涤物件10、11的表面轮廓。
109.一方面,平行抓具1适合用于操纵诸如盘子10或托碟的扁平的碗碟件(参见图1至图3),而通过将平行抓具1旋转90
°
还可以抓取小碗11、瓷杯或其他盆的边缘,如在图4至图6中所指明的。
110.在图7至图10中示出的第二实施变体的突出之处在于,平行抓具1的(未经分段的)抓指3是随着滑块元件6相对于抓具壳体5可移动且尤其可滑动的,而另一方面经分段的夹爪2与抓具壳体5刚性地相连接。
111.在这种实施方式中也可以可靠地操纵多种不同的洗涤物件类型。具体地,在图7和图8中示出可以如何在该第二实施方式中操纵扁平的洗涤物件(尤其盘子10),而在图9和图10示出利用同一平行抓具1还可以操纵其他的洗涤物件类型(尤其小碗11、瓷杯等)。
112.在图11和图12中示出的另一实施变例的特征在于,总共两个未经分段的夹爪3各自设有呈抓指的形状,其中这两个抓指是随着滑块元件6相对于抓具壳体5可移动且尤其可滑动的。尤其,被设计为抓指的这两个另外的夹爪3可以彼此并排地布置在与滑块元件6的移动方向垂直地延伸的线上。
113.本发明不限于附图中所示的实施变例,而是总括考虑本文中公开的所有特征的结果。
114.尤其在此背景下还可设想的是,在抓具壳体5的相反两侧布置有对应的刚性的或挠性的/经分段的夹爪2、3,以便可以以此方式实现不同的抓取区域。
115.本发明还涉及一种在附图中未示出的输送式洗碗机,该输送式洗碗机具有至少一个输送装置(优选呈至少一个输送带的形式),其中该输送式洗碗机在其进入区域设有至少一个装载区域以便优选将洗涤物件自动放置到该输送式洗碗机的输送装置中。在此,装载系统具有至少一个上述类型的平行抓具1。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。