用于自主式地板清洁器的供应和/或处理系统
1.本技术是申请日为2018年6月26日、中国申请号为2018106679315、发明名称为“用于自主式地板清洁器的供应和/或处理系统”的发明专利申请的分案申请,其全部内容结合于此作为参考。
2.对相关申请的引证
3.本技术要求2017年6月27日提交的美国临时专利申请第62/525,383号的权益,其全部内容通过引证结合于此。
技术领域
4.本技术涉及一种用于与自主式地板清洁器的再填充、清空和/或再充电的系统,其包括适于与家用管道连接基础设施耦接的对接站
背景技术:
5.自主式地板清洁器或者机器人地板清洁器无需用户或者操作员的帮助便可移动以清洁地板表面。例如,地板清洁器可构造为将污物(包括灰尘、毛发和其他碎屑)扫入承载于地板清洁器上的收集箱,和/或使用收集污物的布打扫污物。地板清洁器可在清洁地板表面的同时围绕表面随机地移动,或者使用映射/导航系统根据表面进行引导导航。一些地板清洁器进一步构造为施加和提取液体以对地毯、地垫和其他地板表面进行深度清洁。
技术实现要素:
6.本发明的一个方面涉及一种用于自主式地板清洁器的供应和处理系统,包括用于对接自主式地板清洁器的对接站。对接站包括液体供应系统和处理系统,液体供应系统构造为用于填充装在自主式地板清洁器上的供应罐,处理系统构造为用于清空装在自主式地板清洁器上的回收罐。对接站构造为流体地耦接到管道基础设施,并经由管道基础设施填充供应罐和清空回收罐。
附图说明
7.现在将参考附图描述本发明,在附图中:
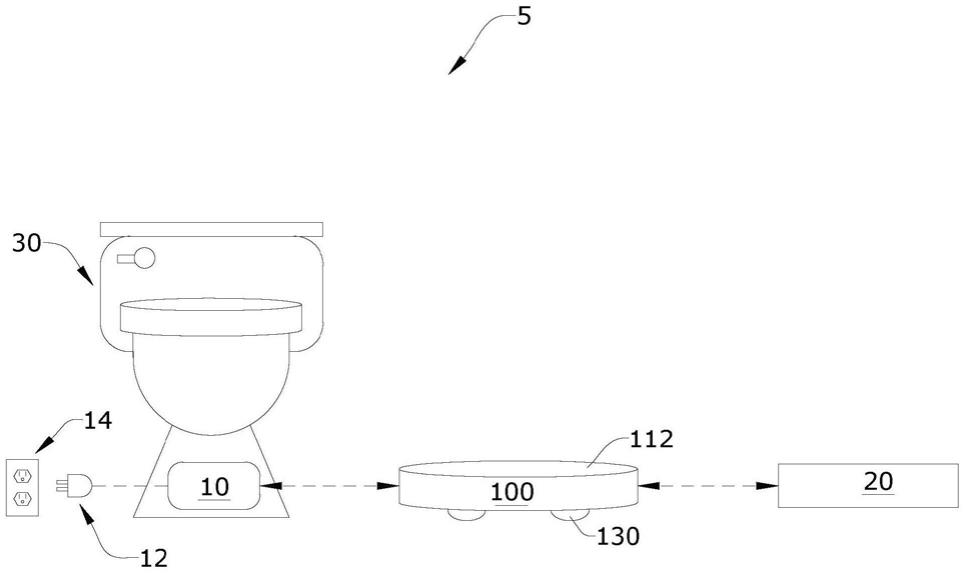
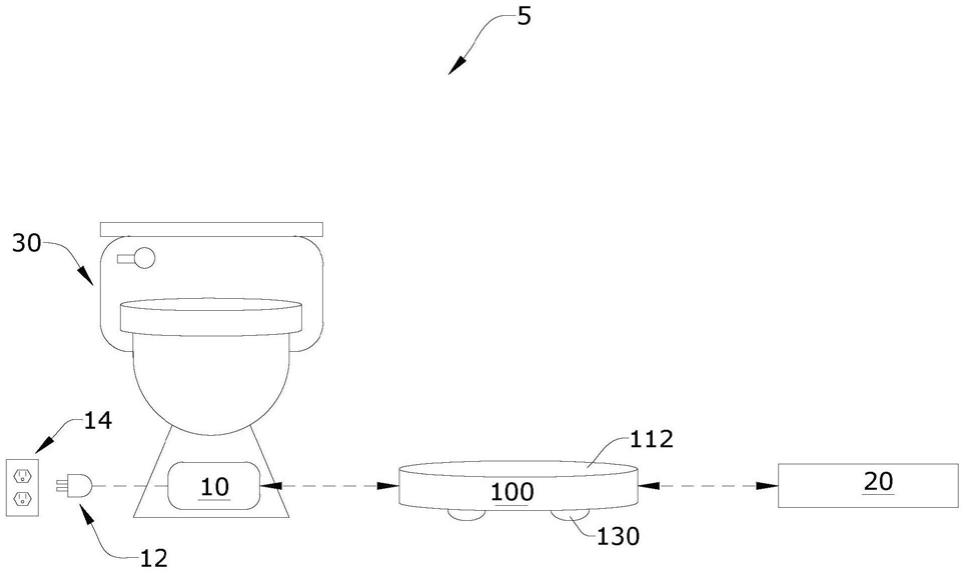
8.图1是根据本发明的一个实施例的用于自主式地板清洁器的用于供应和处理的系统的示意图;
9.图2是用于在图1的系统中使用的自主式深度清洁器的一个实施例的示意图;
10.图3是图1中的马桶对接站的液体供应系统的一个实施例的示意图;
11.图4是用于图3的系统的截止阀的一个实施例的示意图;
12.图5是用于图3的系统的截止阀的另一实施例的示意图;
13.图6是图1中的马桶对接站的液体供应系统的另一实施例的示意图;
14.图7是用于图6的系统的中间储液器的示意图;
15.图8是图1中的马桶对接站的处理系统的一个实施例的示意图;
16.图9是图1中的马桶对接站的处理系统的另一实施例的示意图;
17.图10是图1中的马桶对接站的充电系统的一个实施例的示意图;
18.图11是示出了用于使用图1的系统再填充、清空和再充电自主式深度清洁器的方法的流程图;
19.图12是根据本发明的另一实施例的用于自主式地板清洁器的供应和处理的系统的示意图;
20.图13是处于第一位置中的用于图12的系统的分流阀的示意图;
21.图14是处于第二位置中的图13的分流阀的示意图;
22.图15是用于这里公开的系统的流体耦接组件的一个实施例的示意图;
23.图16是用于这里公开的系统的流体耦接组件的另一实施例的示意图;
24.图17是深度清洁机器人构造为融入用户的家中的系统的一个实施例的示意图;
25.图18是深度清洁机器人融入用户的家中的图17的系统的示意图;
26.图19是深度清洁机器人构造为融入用户的家中的系统的另一实施例的示意图;以及
27.图20是深度清洁机器人融入用户的家中的图19的系统的示意图。
具体实施方式
28.本发明涉及用于深度清洁地板表面(包括地毯和地垫)的自主式清洁器。更具体地,本发明涉及用于再填充(或者填充)和清空自主式深度清洁器的系统和方法。
29.图1是用于根据本发明的一个实施例的自主式地板清洁器的用于供应和处理的系统5的示意图。用于地板表面的深度清洁的系统5可包括深度清洁机器人100形式的自主式地板清洁器,和具有用于机器人100的对接站10的马桶30。深度清洁机器人100将深度清洁器的各种功能系统的部件安装在可自主移动的单元或者壳体112中,包括用于储存清洗液并将清洗液输送到待清洁表面的至少一个流体输送系统、用于从待清洁表面移除清洗液和碎屑并储存所回收的清洗液和碎屑的流体回收系统。对接站10可构造为用淡水自动地填充或者再填充溶液罐,或者机器人100的供应罐106(图2),并使用现有的管道基础设施经由马桶30清空机器人100的回收罐118(图2)。
30.可选地,人工屏障系统20也可设置有系统5,以用于使机器人100包含在用户确定的边界内。而且,可选地,对接站10可进一步连接到家用电源,例如壁装电源插座14,并可包括转换器12,以用于将交流电压转换成直流电压从而对装在机器人100上的电源再充电。对接站10还可包括壳体11,其具有各种用于监控机器人状态的传感器和发射器,使能自动对接功能,与每个机器人通信,以及用于网络和/或蓝牙连通性的特征。
31.图2是自主式深度清洁器的一个实施例或者图1的系统5的深度清洁机器人100的示意图。应指出,图2所示的机器人100只是可与系统5一起使用的深度清洁机器人100的一个实例,其他需要液体供应和处理的自主式清洁器也可与系统5一起使用,包括但不限于能够将蒸汽、薄雾或者水汽输送到待清洁表面的自主式深度清洁器。
32.深度清洁机器人100将提取清洁器的各种功能系统的部件安装在可自主移动的单元或者壳体112(图1)中,包括用于储存清洗液并将清洗液输送到待清洁表面的流体输送系统的至少部件、用于从待清洁表面移除清洗液和碎屑并储存所回收的清洗液和碎屑的流体
回收系统,和用于使机器人100在待清洁表面上自主地移动的驱动系统。深度清洁机器人100可构造为使用来自各种传感器的输入,在清洁地板表面的同时围绕表面随机地移动,以根据需要改变方向或者调节其行程从而避免障碍物,或者如这里举例说明的,可包括导航/映射系统,其用于引导机器人100在待清洁表面上运动,产生并储存待清洁表面的地图,并记录状态或者其他环境变量信息。可移动单元112可包括主壳体,其适于选择性地安装系统的部件以形成整体可移动装置。
33.使控制器128与机器人100的各种功能系统操作地耦接,以控制其操作。控制器128可以是包含至少一个中央处理器(cpu)的微控制器单元(mcu)。
34.流体输送系统可包括用于储存清洗液供应的供应罐106,和与供应罐106流体连通以使清洗液放置在表面上的流体分配器107。清洗液可以是诸如水或者对地毯或硬表面清洁具体配制的清洗液的液体。流体分配器107可以是一个或多个设置于机器人100的壳体112上的喷嘴。或者,流体分配器107可以是具有多个出口的歧管。在供应罐106和流体分配器107之间的流体通路中设置流体输送泵105,以控制流体到流体分配器107的流动。可使本领域中众所周知的各种可选部件的组合包含在流体输送系统中,例如用于在将清洗液应用于表面或者一个或多个流体控制和混合阀之前加热清洗液的加热器。
35.可提供至少一个搅拌器或者刷子140以搅动已经分配了流体的待清洁表面。刷子140可以是安装为相对于机器人100所移动的表面围绕基本上水平的轴线旋转的刷辊。可在机器人100内设置包括分开的、专用的刷子马达142的驱动组件,以驱动刷子140。或者,刷子140可由真空马达116驱动。搅拌器的其他实施例也是可能的,包括固定的或者不移动的一个或多个刷子,或者围绕基本上竖直的轴线旋转的一个或多个刷子。
36.流体回收系统可包括:通过机器人100的提取路径,其具有进气口和出气口;提取喷嘴或者吸嘴114,其定位为面对待清洁表面并限定进气口,回收罐118用于接收从表面移除的污物和液体以进行后续处理;和抽吸源116,其与吸嘴114和回收罐118流体连通以产生通过提取路径的工作气流。抽吸源116可以是由机器人100承载的真空马达116,其流体地位于出气口的上游,并且抽吸源116可限定提取路径的一部分。回收罐118也可限定提取路径的一部分,并可包括用于使液体与工作气流分开的空气/液体分离器。可选地,也可提供马达前过滤器和/或马达后过滤器(未示出)。
37.虽然未示出,但是可在机器人100的壳体112上设置橡胶扫帚,其靠近吸嘴114,并构造为当机器人100移动穿过待清洁表面时接触表面。橡胶扫帚从待清洁表面擦去残留液体,使得可将其经由吸嘴114抽入流体回收路径,从而在待清洁表面上留下湿气和无条纹结果。
38.驱动系统可包括用于驱动机器人100穿过待清洁表面的驱动轮130。可通过公共驱动马达或者单独的通过传动装置与驱动轮130耦接的驱动马达131操作驱动轮130,传动装置可包括齿轮系组件或者另一合适的传动装置。驱动系统可基于来自导航/映射系统的输入,从控制器128接收输入以驱动机器人100横跨地板。可在向前或者反向的方向上驱动该驱动轮130,以使单元向前或者向后运动。而且,可同时地或者单独地操作驱动轮,以使单元在预期方向上转动。
39.控制器128可从导航/映射系统接收输入以引导驱动系统,使机器人100在待清洁表面上移动。导航/映射系统可包括存储器168,存储器168储存用于导航的地图和来自各种
传感器的输入,其用来引导机器人100的运动。例如,可将轮编码器172放在轮马达131的驱动轴上,并且轮编码器172构造为测量所行驶的距离。可将此测量结果作为输入提供给控制器128。
40.可提供马达驱动器103、146、144和148以分别控制泵105、刷子马达142、真空马达116和轮马达131,并且马达驱动器103、146、144和148用作控制器128和马达105、142、116、131之间的接口。马达驱动器103、146、144和148可以是集成电路芯片(ic)。对于轮马达131,一个马达驱动器148可同时控制多个马达131。
41.用于泵105、刷子马达142、真空马达116和轮马达131的马达驱动器103、146、144和148可电耦接到电池管理系统150,电池管理系统150包括可再充电电池或者电池组152。在一个实例中,电池组152可包括锂离子电池。可在单元112的外部上设置用于电池组152的充电触点。对接站10(图1)可设置有对应的充电触点。
42.控制器128进一步与用于从用户接收输入的用户接口(ui)124操作地耦接。用户接口124可用来选择用于机器人100的操作周期,或者以其他方式控制机器人100的操作。用户接口124可具有显示器156,例如led显示器,用于对用户提供视觉通知。可提供显示驱动器158以控制显示器156,并且显示驱动器158用作控制器128和显示器156之间的接口。显示驱动器158可以是集成电路芯片(ic)。机器人100可进一步设置有用于对用户提供听得见的通知的扬声器(未示出)。
43.用户接口124可进一步具有一个或多个开关126,用户致动该一个或多个开关126以对控制器128提供输入,从而控制机器人100的各种部件的操作。可通过按钮、切换键,或者任何其他合适的致动机构来致动开关126。可提供开关驱动器125以控制开关126,并且开关驱动器125用作控制器128和开关126之间的接口。
44.控制器128可进一步与各种用于接收与环境相关的输入的传感器操作地耦接,并且可使用传感器输入来控制机器人100的操作。传感器输入可进一步储存在存储器168中,和/或用来生成用于导航的地图。在图2中举例说明了一些代表性传感器,尽管应理解,可能并不是提供所有所示传感器,可提供附加的未示出的传感器,并且可提供任何组合的传感器。
45.机器人100可包括定位系统或者定位置系统,其具有一个或多个确定机器人相对于物体的位置的传感器。定位置系统可包括用于距离和位置感测的一个或多个红外(ir)障碍物传感器170。可将障碍物传感器170安装到机器人100的壳体112,例如在机器人100的前面,以确定在机器人100的前面到障碍物的距离。当检测到物体时,来自障碍物传感器170的输入可用来减慢和/或调节机器人100的行程。
46.还可提供撞击传感器174,以确定对机器人100的正面碰撞或者侧面碰撞。可使撞击传感器174与机器人100的壳体112上的减震器集成。来自撞击传感器174的输出信号对控制器128提供输入,以选择障碍物回避算法。
47.除了障碍物传感器170和撞击传感器174以外,定位置系统可包括附加的传感器,包括侧壁传感器176、一个或多个陡壁传感器180,和/或加速度计178。侧壁传感器或者壁沿循传感器176可位于机器人100的侧面的附近,并可包括面向侧面的光学位置传感器,其提供距离反馈并控制机器人100,使得机器人100可不接触墙壁地沿循墙壁。陡壁传感器180可以是面向底部的光学位置传感器,其提供距离反馈并控制机器人100,使得机器人100可避
免过度的下降,例如楼梯井或者壁架。除了光学传感器以外,壁沿循传感器176和陡壁传感器180可以是机械传感器或者超声波传感器。
48.加速度计178可以是位于控制器128上的集成惯性传感器,并且可以是九轴陀螺仪或者加速度计,以感测线性加速度、旋转加速度和磁场加速度。加速度计178可使用加速度输入数据来计算速度和姿势的变化并将其传达给控制器128,以遍布待清洁表面而导航机器人100。
49.机器人100可进一步包括一个或多个提升传感器182,其当将机器人100从待清洁表面提起时进行检测,例如当用户捡起机器人100时。将此信息作为输入提供给控制器128,控制器128将中止泵105、刷子马达142、真空马达116和/或轮马达131的操作。提升传感器182也可当机器人100与待清洁表面接触时进行检测,例如当用户将机器人100放回在地面上时;在这种输入时,控制器128可重新启动泵105、刷子马达142、真空马达116和轮马达131的操作。
50.虽然未示出,但是机器人100可以可选地包括用于检测供应罐106和回收罐118的存在的一个或多个传感器。例如,可提供用于检测供应罐106和回收罐118的重量的一个或多个压力传感器。将此信息作为输入提供给控制器128,控制器128可防止机器人100的操作,直到适当地安装供应罐106和回收罐118为止。控制器128还可指示显示器156以对用户提供供应罐106或者回收罐118丢失的通知。
51.机器人100可进一步包括用于检测待清洁表面的状态的一个或多个地板状态传感器186。例如,机器人100可设置有红外污物传感器、污渍传感器、气味传感器,和/或湿块传感器。地板状态传感器186对控制器128提供输入,控制器128可基于待清洁表面的状态引导机器人100的操作,例如通过选择或者改变清洁周期。
52.如对图1的系统简要地讨论的,还可提供人工屏障系统20以使机器人100包含在用户确定的边界内。人工屏障系统20可包括人工屏障发生器(未示出),其包括带有用于从机器人100接收声波或者射频信号的至少一个声波接收器或者射频接收器和用于在预定时段朝向预定方向发射编码ir光束的至少一个ir发射器的壳体。人工屏障发生器可以是由可再充电电池或者不可再充电电池进行电池供电的。人工屏障发生器可包括诸如通用串行总线(usb)端口的端口,以从诸如usb电池组的移动充电装置接收功率,从而对可再充电电池充电或者直接对人工屏障系统供能。在一个实例中,声波接收器可包括配置为感测预定阈值声级的麦克风,该预定阈值声级对应于当机器人100在离人工屏障发生器预定距离内时由机器人100发射的声级。在另一实例中,视频接收器可检测射频信号,例如由机器人100或者对接站10广播的服务集标识符(ssid),其中,机器人100或者对接站10可包括可配置为用作wifi接入点(ap)的电子器件。可选地,人工屏障发生器在壳体的底座附近可进一步包括多个ir发射器,其配置为在人工屏障发生器壳体的底座周围发射多个短场ir光束。人工屏障发生器可配置为在预定时段选择性地发射一个或多个ir光束,但是仅在麦克风感测到阈值声级或者射频接收器感测到ssid之后,其指示出机器人100在附近。因此,人工屏障发生器能够通过仅当机器人100处于人工屏障发生器附近时发射ir光束,或者通过在待清洁表面上主动地执行清洁操作,来保存功率。
53.机器人100在机器人100的边界周围可具有多个ir收发器192,以感测从人工屏障系统20发射的ir信号并对控制器128输出对应信号,控制器128可调节驱动轮130控制参数,
以调节机器人100的位置,从而避开由人工屏障编码ir光束和短场ir光束建立的边界。这防止机器人100穿过人工屏障边界和/或与人工屏障发生器壳体相撞。ir收发器192还可用来将机器人100引向对接站10(图1)。
54.在操作中,从机器人100发射的大于预定阈值声级的声音由麦克风感测到,并触发人工屏障发生器在预定时段如之前描述的发射一个或多个编码ir光束。机器人100上的ir收发器192感测ir光束并对控制器128输出信号,然后控制器128操纵驱动系统以调节机器人100的位置,从而在继续在待清洁表面上执行清洁操作的同时,避开由人工屏障系统20建立的边界。
55.参考图1和图2,马桶30是许多家庭和其他建筑物的现有基础设施的一部分,并且深度清洁机器人100可经由马桶30利用现有基础设施,以进行充水和废物处理或者倾倒。在一个实施例中,充水和倾倒对深度清洁机器人100提供长期自动化的清洁周期。
56.与马桶30集成的对接站10可包括用于再填充机器人100的供应罐106的液体供应系统,和用于清空机器人100的回收罐118的处理系统。在图3至图7中示出了对接站10的液体供应系统的实施例。在图8至图9中示出了对接站10的处理系统的实施例。对接站10可包括用于对机器人100再充电的充电系统。在图10中示出了对接站10的充电系统的一个实施例。这些实施例可以是单独的或者是其任何组合的,以提供带有液体供应、处理和/或充电能力的对接站10。
57.可使用售后工具包,用根据任何这里讨论的实施例的对接站10来样式翻新现有的马桶30。或者,可对马桶30提供根据任何这里讨论的实施例的来自制造商的集成对接站10。
58.转到图3,系统5的马桶30可包括传统的特征,例如连接到水箱34的碗状物32,水箱34使得能够用水充满碗状物32。碗状物32保持水并具有连接到排水装置38以处理废水和废物的集污器或者虹吸管36。马桶30可经由水管40与家用供水装置连接,水管40通常包括用于可选地关闭对马桶30的供水的截止阀42。
59.水箱包含用于再填充碗状物32的备用水33,加上用于冲洗碗状物32和再填充水箱34的机构。水箱34的外部上的把手44用作用于冲洗机构的致动器,并与通常封闭水箱34的出口孔的冲洗阀46操作地耦接。
60.当通过旋转把手44来冲洗马桶30时,冲洗阀46打开,并且来自水箱34的水快速地进入碗状物32以激活虹吸管36。水可经由碗状物32的边缘48中的孔进入碗状物32。将来自碗状物32的废物和水吸入排水装置38,排水装置38可连接到化粪池或者与污水处理厂的系统。
61.一旦已经清空水箱34,冲洗阀46便关闭,使得可通过再填充机构再填充水箱34。再填充机构可包括浮子50,其与打开和关闭水的供应的填充阀52耦接。当水箱34中的水位下降且浮子下落时,填充阀52打开水的供应。填充阀52使水进入水箱34,并经由溢流管54进入碗状物32。当水箱34中的水位上升到预定水平时,浮子50关闭填充阀52并关闭水的供应。
62.用于对接站10的液体供应系统8可包括从马桶水箱34抽水的供应管道56,马桶水箱34提供用于再填充机器人100的低压水源,并在对接站10的壳体11上包括供水耦接件16,其构造为与机器人100上的对应的水接收器耦接件132匹配或者以其他方式耦接。
63.供应管道56可从马桶水箱34向供水耦接件16提供水。机器人100上的水接收器耦接件132可与机器人供应罐106流体连通,使得将由接收器耦接件132接收的流体提供给机
器人供应罐106。
64.机器人100可包括填充泵134,其用于将清水从马桶水箱34经由供应管道56抽入机器人供应罐106,并可选地包括一个或多个附加管道(未示出),其使机器人100的部件流体地耦接在一起。除了设置于供应罐106和流体分配器107(图2)之间的流体通路中的流体输送泵105(图2)以外,可提供机器人填充泵134,以控制流体到流体分配器107的流动。或者,单个泵可用作填充泵和流体输送泵,带有合适的管道和用于填充或者流体输送的泵的阀门支撑操作。在另一另选实施例中,可在对接站10中而不是在机器人100中设置填充泵134。
65.可选地,对接站10可包括截止阀18,其用于当机器人100与对接站10不对接时关闭通过供应管道56的流体通路。截止阀18可构造为当机器人100与对接站10对接时自动地打开。例如,截止阀18可由机器人100的一部分机械地接合,或者更具体地,由水接收器耦接件132的一部分机械地接合,以打开供应管道56和供应罐106之间的流体通路。
66.在一个图4所示的实例中,截止阀18可以是装有弹簧的阀,其当激活填充泵134(图3)时打开,并施加负压以打开截止阀18。当机器人100与对接站10对接时,装有弹簧的阀18可保持在通常关闭的位置中,阀柱塞17由弹簧19偏压,如由虚线阀柱塞所示的。当填充泵134通电时,通过由填充泵134施加的负压打开装有弹簧的阀18,并且阀柱塞17可打开,如实线阀柱塞17所示。
67.在另一图5所示的实例中,用于图3的马桶30的对接站210可包括截止阀218,其可以是机电操作的电磁阀218,当激活机器人100(图3)的填充泵134时,由通过螺线管220的电流打开电磁阀218。对接站210与之前描述的对接站10类似。因此,将用相同的数字加上200来识别相同的零件,应理解,对接站10的相同零件的描述适用于对接站210,除非另外指出。当机器人100与对接站210对接时,螺线管220的阀柱塞217可保持在通常关闭的位置中,如由图5中的虚线阀柱塞所示的。当填充泵134通电时,螺线管220可施加电流以打开截止阀218,如由实线阀柱塞217所示的。弹簧219可用来在不激活螺线管220时保持阀柱塞217关闭。可选地,可在阀柱塞217和供应管道256之间的界面设置密封件222,以防止液体从供应管道256离开。
68.在操作中,返回参考图3,在机器人100和对接站10之间的成功对接中,机器人100上的水接收器耦接件132与对接站10的供水耦接件16匹配或者以其他方式流体地耦接。接下来,填充泵134通电并从马桶水箱34抽取液体,通过供应管道56,并进入机器人供应罐106。
69.填充泵134可在机器人100和对接站10之间成功对接时自动通电。在一个实例中,一旦机器人100成功地对接,便可开始填充循环操作或者填充模式操作。在填充模式开始之前,机器人100可对对接站10发送指示机器人100已经成功对接并准备好开始填充的确认信号。例如,可将rf信号从机器人100发送到对接站10,并回到机器人100。或者,可通过用于电池组152(图2)的对应充电触点和对接站10之间的充电通路发送脉冲信号。作为又一另选方式,可将ir信号发送到机器人100,发送到对接站上的ir接收器。作为又一另选方式,机器人100可经由通过匹配的水接收器耦接件132和供水耦接件16的电信号与对接站10通信。
70.优选地在发送确认信号之后自动地开始填充模式。填充模式可由机器人(图2)上的控制器128控制,并且一旦确认机器人100在对接站10中对接,便可自动地开始。
71.或者,可手动地开始填充模式,通过用户通过按下用户界面124(图2)上的按钮开
始服务模式来进行。当浴室或者马桶30在使用中时,当机器人100回到对接站10时,用户将宁愿延迟填充模式,填充模式的手动开始可能是优选的。用户界面124上的按钮可构造为暂停和重新开始填充模式。当机器人100未对接时,填充模式可由控制器128锁定,以防止填充模式的不小心开始。
72.当机器人供应罐106充满时,可使填充泵134自动地断电。例如,供应罐106可设置有流体液面传感器(未示出),当供应罐106满了和填充完成时,流体液面传感器与机器人100上的控制器128通信。
73.图6是马桶对接站310的液体供应系统308的另一实施例的示意图。液体供应系统308与之前描述的液体供应系统8类似。因此,将用相同的数字加上300来识别相同的零件,应理解,液体供应系统8的相同零件的描述适用于液体供应系统308,除非另外指出。在图6的实施例中,高压供应管道356从对马桶330供水的水管340抽水,水管340提供用于再填充机器人100的高压水源,并直接连接到对接站310。流量阀358集成在水管340中或者以其他方式设置于水管340中,以控制到供应管道356的流量。
74.对接站310的壳体311上的供水耦接件316构造为与机器人100上的对应的水接收器耦接件132匹配或者以其他方式耦接。供应管道356从水管340向供水耦接件316提供水。机器人100上的水接收器耦接件132与机器人供应罐106流体连通,使得将由水接收器耦接件接收的流体提供给机器人供应罐106。
75.对接站310可进一步包括中间储液器,其带有与马桶水箱中的浮子350截止组件类似的浮式截止阀。在图7中更详细地示出了中间储液器360和浮式截止阀318的一个实例。浮子截止组件318包括与打开和关闭到供水耦接件316的供水的储液器再填充阀362耦接的浮子364。浮子364包括浮子杆366,其压在再填充阀362上以当中间储液器360满了时关闭再填充阀362。当中间储液器360中的水位下降且浮子364下落时,再填充阀362打开水的供应。打开再填充阀362可将水从高压供应管道356运送到中间储液器360中。当中间储液器360中的水位上升到预定水平时,浮子364关闭储液器再填充阀362并关闭水的供应。填充管368从中间储液器360向供水耦接件316提供水,并具有可浸入中间储液器360的水中的入口端370。储液器再填充阀362可构造为当中间储液器360中的水位下降到低于填充管368的入口370时打开。
76.在操作中,返回参考图6,在机器人100和对接站310之间的成功对接中,机器人100上的水接收器耦接件132与对接站310的供水耦接件316匹配或者以其他方式流体地耦接。接下来,填充泵134通电并从对接站310的中间储液器360抽取液体。
77.在机器人100和对接站310之间成功对接时,可使填充泵134自动地通电,当机器人供应罐106满了时,可使填充泵134自动地断电,如以上相对于图3的液体供应系统308描述的。或者,可手动地开始填充模式,如以上相对于图3的液体供应系统308描述的。
78.从中间储液器360填充,而不是直接从马桶水箱334填充,可减少机器人100和对接站310之间的耦接问题。与更高的马桶水箱334相比,中间储液器360还具有更小的来自重力的水头压力。带有中间储液器360的对接站310也可容易适应于其他器具,包括但不限于洗碗机、电冰箱、洗衣机、加湿器,或者干衣机。
79.图8是马桶对接站410的处理系统409的一个实施例的示意图。处理系统409可与这里公开的液体供应系统的任何实施例组合使用,并在对接站410中包括处理泵472,其连接
到与虹吸管436的下游和排水装置438的上游的马桶430管道连接的处理管道458。处理泵472可由电源供电,例如经由对接站410与壁装电源插座14的连接,如图1所示。
80.处理系统409在对接站410的壳体411上进一步包括废物接收器耦接件415,其构造为与机器人上的对应的废物处理耦接件136匹配或者以其他方式耦接。处理管道458将废物从回收罐118运送到虹吸管436下游和排水装置438上游的马桶管道。机器人100上的废物处理耦接件136与机器人回收罐118流体连通,使得可经由对接的或者匹配的耦接件415、136,通过处理系统处理由回收罐118收集的废物。使处理泵472的入口侧与废物接收器耦接件415耦接,同时使处理泵472的出口侧与处理管道458耦接。
81.可选地,一个或多个附加管道(未示出)可使机器人100的部件流体地耦接在一起,和/或使对接站410的部件流体地耦接在一起。或者,对于机器人100,废物处理耦接件415可直接设置于回收罐118上,并可构造为当机器人100与对接站410不对接时关闭回收罐118的出口,并进一步构造为当机器人100与对接站410对接时打开回收罐118的出口。
82.可选地,马桶430的把手444可以是构造为与机器人100或者对接站410通信的自动把手。在从机器人100排出废物的过程中或者之后,机器人100或者对接站410可对自动把手发送信号以冲洗马桶430。可选地,马桶430还可设置有碗状物液面传感器474,以防止废物填充堵塞的马桶430。
83.在操作中,在机器人100和对接站410之间的成功对接中,机器人100上的废物处理耦接件136与对接站410的废物接收器耦接件415匹配或者以其他方式流体地耦接。接下来,对接站410中的处理泵472通电并产生吸力,以从回收罐118通过处理管道458抽取废物,并将其抽入马桶430的排水装置438,排水装置438可连接到化粪池或者与污水处理厂连接的系统。
84.处理泵472可在机器人100和对接站410之间成功对接时自动地通电。在一个实例中,一旦机器人100成功地对接,便可开始清空周期操作或者清空模式操作。在清空模式开始之前,机器人100可对对接站410发送指示机器人100已经成功对接并准备好开始清空的确认信号。例如,可将rf信号从机器人100发送到对接站410,并回到机器人100。或者,可通过用于电池组152(图2)的对应充电触点和对接站410之间的充电通路发送脉冲信号。作为又一另选方式,可将ir信号发送到机器人100,发送到对接站410上的ir接收器。作为又一另选方式,机器人100可经由通过匹配的废物接收器耦接件415和废物供应耦接件136的电信号与对接站410通信。
85.优选地在发送确认信号之后自动地开始清空模式。清空模式可由对接站410上的控制器(未示出)控制,并且一旦确认机器人100在对接站410中对接,便可自动地开始。
86.或者,可手动地开始清空模式,通过用户通过按下用户界面124(图2)上的按钮开始清空模式来进行。当浴室或者马桶430在使用中时,当机器人100回到对接站410时,用户将宁愿延迟清空模式,清空模式的手动开始可能是优选的。用户界面124上的按钮可构造为暂停和重新开始清空模式。当机器人100未对接时,清空模式可由机器人100上的控制器128锁定,以防止清空模式的不小心开始。
87.当机器人回收罐118清空时,可使处理泵472自动地断电。例如,回收罐118可设置有液面传感器(level sensor,水平传感器)(未示出),当回收罐118空了和清空完成时,液面传感器与对接站410上的控制器通信。
88.图9是马桶对接站510的处理系统509的另一实施例的示意图。处理系统509与之前描述的处理系统409类似。因此,将用相同的数字加上100来识别相同的零件,应理解,处理系统409的相同零件的描述适用于处理系统509,除非另外指出。代表性的处理系统509可与这里公开的液体供应系统的任何实施例组合使用。处理系统509包括安装到马桶530的处理泵578,并具有流体地耦接到处理管道577的出口侧,处理管道577与虹吸管536下游和排水装置538上游的马桶530管道连接。处理泵578的入口侧流体地耦接到排出管道576,排出管道576与对接站510的壳体511上的废物接收器耦接件515流体连通,其构造为与机器人100上的对应的废物处理耦接件136匹配或者以其他方式耦接。排出管道576由处理泵578真空加压,并将废物从回收罐118运送到处理泵578。机器人100上的废物处理耦接件136与机器人回收罐118流体连通,使得可经由对接的或者匹配的耦接件136、515由处理系统处理由回收罐118收集的废物。处理泵578可由电源供电,例如经由连接到壁装电源插座(未示出)。
89.在处理管道577和虹吸管536与马桶530的排水装置538之间的通道之间设置阀580,在处理管道577的出口或者通道的入口处。在一个实例中,阀580可包括挡板阀,其适于在从机器人100疏散废物之前和之后,在通道的入口处产生不透水的密封。当使处理泵578通电且废物流过处理管道577时,挡板阀580打开,允许废物流入虹吸管536和马桶530的排水装置538之间的通道。然后,挡板阀580关闭并重新形成不透水的密封。
90.处理泵578可与对接站510分离地安装到马桶530。在这里图示的实例中,处理泵578可安装到马桶530的后面,在水箱534的下方。其他安装位置是可能的,例如安装到马桶530或者水箱534的侧面,或者安装在水箱534本身的内部。
91.可选地,一个或多个附加管道(未示出)可使机器人100的部件流体地耦接在一起,和/或使对接站510的部件流体地耦接在一起。或者,对于机器人100,废物处理耦接件136可直接设置于回收罐118上,并可构造为当机器人100与对接站510不对接时关闭回收罐118的出口,并进一步构造为当机器人100与对接站510对接时打开回收罐118的出口。
92.在操作中,在机器人100和对接站510之间的成功对接中,机器人100上的废物处理耦接件136与对接站510的水接收器耦接件515匹配或者以其他方式流体地耦接。接下来,马桶530上的处理泵578通电并产生吸力,以从回收罐118通过排出管道576、处理泵578和处理管道577抽取废物,并将其抽入马桶530的排水装置538,排水装置538可连接到化粪池或者与污水处理厂连接的系统。
93.处理泵578可在机器人100和对接站510之间成功对接时自动地通电。在一个实例中,一旦机器人100成功地对接,便可开始清空周期操作或者清空模式操作,并且对接站510可与处理泵578通信以开始清空模式。在清空模式开始之前,机器人100可对对接站510发送指示机器人100已经成功对接并准备好开始清空的确认信号。例如,可将rf信号从机器人100发送到对接站510,并回到机器人100。或者,可通过用于电池组152(图2)的充电触点和对接站510之间的充电通路发送脉冲信号。作为又一另选方式,可将ir信号发送到机器人100,发送到对接站510上的ir接收器。作为又一另选方式,机器人100可经由通过匹配的废物接收器耦接件515和废物供应耦接件136的电信号与对接站510通信。
94.优选地在发送确认信号之后自动地开始清空模式。清空模式可由对接站510上的控制器控制,并且一旦确认机器人100在对接站510中对接,便可自动地开始。
95.或者,可手动地开始清空模式,通过用户通过按下用户界面124(图2)上的按钮开
始清空模式来进行。当浴室或者马桶530在使用中时,当机器人100回到对接站510时,用户将宁愿延迟清空模式,清空模式的手动开始可能是优选的。用户界面124上的按钮可构造为暂停和重新开始清空模式。当机器人100未对接时,清空模式可由机器人100上的控制器128锁定,以防止清空模式的不小心开始。
96.当机器人回收罐118空了时,可使处理泵578自动地断电。例如,回收罐118可设置有液面传感器(未示出),当回收罐118空了和清空完成时,液面传感器与对接站510上的控制器通信。
97.图10是马桶对接站610的充电系统607的一个实施例的示意图。充电系统607可与这里公开的液体供应系统或者处理系统的任何实施例组合使用。可在机器人100的外部上设置用于机器人100的电池组152的充电触点154。对接站610可设置有对应的充电触点684。如以上讨论的,电池组152对机器人100的各种部件供电,包括但不限于,分别用于泵105、刷子马达142、真空马达116和轮马达131的马达驱动器103、146、144和148(见图2)。在一个实例中,设置于机器人100上的充电触点154可以是电连接器,例如直流电插孔154,设置于对接站610上的充电触点684可以是直流插头。
98.对接站610可通过电源线682连接到家用电源,例如壁装电源插座614.对接站610可进一步包括转换器612,以用于将来自壁装电源插座614的交流电压转换成用于对装在机器人100上的电源再充电的直流电压。对接站610还可包括各种用于监控机器人状态的传感器和发射器,使能自动对接功能,与每个机器人通信,以及用于网络和/或蓝牙连通性的特征。
99.在操作中,在机器人100和对接站610之间的成功对接中,机器人100上的充电触点154与对接站610的充电触点684匹配或者以其他方式电耦接。除了以上讨论的供应和/或处理功能以外,马桶630可设置有再充电功能。这样,当机器人100与马桶630对接以进行供应或者处理时,可对机器人100的电池152再充电。
100.图11描绘了用于使用图1的系统5再填充和清空深度清洁机器人100的方法700的一个实施例。在方法700的开始步骤710时,深度清洁机器人100在步骤720回到对接站10。这可包括使机器人100自主地驱动到马桶30并使机器人100与对接站10对接。可使用ir收发器192(图2)将机器人100引导到马桶30。一旦对接,便使驱动轮130停止。深度清洁机器人100可基于以下任何一个水平回到对接站10:达到预定下限的供应罐106中的清洗液的水平、达到预定上限的回收罐118中的回收流体的水平,达到预定下限的电池152的电荷水平,或者在预定量的运行时间之后。
101.在步骤730,使机器人100与对接站10对接可包括一个或多个以下操作:在机器人100的供应罐106和对接站10的液体供应系统之间形成流体连接;在机器人100的回收罐118和对接站10的处理系统之间形成流体连接;和/或在充电触点154、684(图10)之间形成电连接以对电池组152再充电。
102.一旦对接,便可开始服务周期操作或者服务模式操作。在服务模式开始之前,机器人100可对对接站10发送指示机器人100已经在步骤740成功对接并准备好开始再填充和清空的确认信号。例如,可将rf信号从机器人100发送到对接站10,并回到机器人100。或者,可通过充电触点154、684之间的充电通路发送脉冲信号。作为又一另选方式,可将ir信号发送到机器人100,发送到对接站10上的ir接收器。
103.优选地,在740发送确认信号之后自动地开始服务模式。服务模式可由机器人100(图2)上的控制器128控制,并且一旦确认深度清洁机器人100在对接站10中对接时,便可自动地开始。
104.或者,可手动地开始服务模式,通过用户通过按下用户界面124(图2)上的按钮开始服务模式来进行。当浴室或者马桶30在使用中时,当机器人100回到对接站10时,用户将宁愿延迟服务模式,服务模式的手动开始可能是优选的。用户界面124上的按钮可构造为暂停和重新开始该模式。当深度清洁机器人100未对接时,服务模式可由控制器128锁定,以防止服务模式的不小心开始。
105.服务模式可包括步骤750的再填充阶段,其中,将水从对接站输送到机器人的供应罐。服务模式还可包括步骤760的清空阶段,其中,将回收罐118中的废物经由对接站10清空到马桶30。服务模式还可包括步骤770的再充电阶段,其中,经由对接站10对机器人100的电池152再充电。
106.可同时地或者顺序地执行服务模式的再填充、清空和/或再充电阶段,以任何顺序并通过两个阶段之间的任何量的重叠。在又一另选方式中,一个阶段可在从另一阶段开始的定时延迟之后开始。
107.步骤750、760和770的结束可以是与时间相关的,或者可继续直到供应罐106充满、回收罐118清空,和/或对电池152再充电充满为止。在服务模式的结束780之后,可使对接的深度清洁机器人100解除对接以重新开始清洁,或者可保持对接直到需要另一清洁操作为止。
108.虽然图11所示的方法包括对深度清洁机器人再填充、清空和再充电,但是还理解,该方法的一些实施例可仅包括再填充或者清空或者再充电步骤的一部分。例如,在清洁操作的开始,深度清洁机器人100可能仅需要在步骤750填充供应罐106。在另一实例中,在清洁操作的结束时,深度清洁机器人100可能仅需要在步骤760清空回收罐118。
109.图12是根据本发明的另一实施例的用于自主式地板清洁器的处理系统800的示意图。在图12中,系统800包括深度清洁机器人100和具有用于机器人100的对接站810的家用器具。将家用器具举例说明为洗碗机830。对接站810构造为在利用现有的洗碗机830和管道连接基础设施的同时,经由洗碗机830自动地清空机器人100的回收罐118。
110.图12的深度清洁机器人100可构造为任何类型的自主式深度清洁器。虽然未示出,但是系统800可进一步包括如之前描述的用于使机器人100包含在用户确定的边界内的人工屏障系统20(图1)。可选地,对接站810可进一步连接到家用电源,例如壁装电源插座,并且可包括用于将交流电压转换成用于对装在机器人100上的电源再充电的直流电压的转换器。对接站810还可包括各种用于监控机器人状态的传感器和发射器,使能自动对接功能,与每个机器人通信,以及用于网络和/或蓝牙连通性的特征。
111.洗碗机830包括洗涤室834,其在洗涤室834的下部设置有集水池836。在洗碗机830的操作过程中,喷射在洗涤室834中的餐具上的水向下流动并收集在集水池836中。使泵840与集水池836流体连通,以将集水池836中的液体引导到排水管道842。可提供分开的冲洗泵(未示出)以使集水池836中的液体重新循环回到洗涤室834中,或者图12所示的泵840可以是组合式冲洗/排水泵,其可将液体引导到排水管道842或者洗涤室834。
112.处理系统800可包括:洗碗机泵840;洗碗机830的壳体或者橱柜上的废物接收器耦
接件815,其构造为与机器人100上的对应的废物处理耦接件136匹配或者以其他方式耦接;以及与废物接收器耦接件815流体连通的排出管道876。洗碗机830的对接站810,特别是废物接收器耦接件815,可设置于洗碗机830的前侧,例如在洗碗机830的门832的下方,或者靠近橱柜踢脚835中的洗碗机830。机器人100上的废物处理耦接件136与机器人回收罐118流体连通,使得可经由对接的或者匹配的耦接件136、815由处理系统处理由回收罐118收集的废物。排出管道876具有流体地耦接到泵840的入口侧的出口端。排出管道876可由泵840真空加压,并可将废物从回收罐118运送到泵840,并运送到排水管道842上,也由泵840加压。
113.如图所示,排水管道842可与和水池850相连的垃圾处理装置852流体地耦接。因此,排水管道842将废物从回收罐118运送到垃圾处理装置852。垃圾处理装置852的出口与集污器854流体地耦接。集污器854可与化粪池或者和污水处理厂连接的系统流体地耦接。
114.可选地,一个或多个附加管道(未示出)可使机器人100的部件流体地耦接在一起,和/或使对接站810或者洗碗机830的部件流体地耦接在一起。或者,对于机器人100,废物处理耦接件136可直接设置于回收罐118上,并可构造为当机器人100与对接站810不对接时关闭回收罐118的出口,并进一步构造为当机器人100与对接站810对接时打开回收罐118的出口。
115.处理系统可以可选地设置有分流阀838,其构造为将流体通路转向洗碗机集水池836和机器人100之间的洗碗机泵840。在图13至图14所示的一个实例中,分流阀838可包括可旋转阀体839,其可在至少图13所示的第一位置和图14所示的第二位置之间移动,在第一位置中,集水池836与泵840流体连通,在第二位置中,对接站810的废物接收器耦接件815与泵840流体连通。当机器人100与对接站810对接时,分流阀838可自动地移动到图14所示的第二位置。
116.在操作中,在机器人100和对接站810之间的成功对接中,机器人上的废物处理耦接件136与对接站810的废物接收器耦接件815匹配或者以其他方式流体地耦接。接下来,洗碗机泵840通电并产生吸力,以从回收罐118通过排出管道876抽取废物,并将其抽入洗碗机830的排水管道842。
117.洗碗机泵840可在机器人100和对接站810之间成功对接时自动地通电。在一个实例中,一旦机器人100成功地对接,便可开始清空周期操作或者清空模式操作。在清空模式开始之前,机器人100可对对接站810发送指示机器人100已经成功对接并准备好开始清空的确认信号。例如,可将rf信号从机器人100发送到对接站810,并回到机器人100。或者,可通过用于电池组152(图2)的充电触点和对接站810之间的充电通路发送脉冲信号。作为又一另选方式,可将ir信号发送到机器人100,发送到对接站810上的ir接收器。作为又一另选方式,机器人100可经由通过匹配的废物接收器耦接件815和废物供应耦接件136的电信号与对接站810通信。
118.优选地在发送确认信号之后自动地开始清空模式。清空模式可由对接站810上的控制器或者由洗碗机830上的控制器控制,并且一旦确认机器人100在对接站810中对接,便可自动地开始。当机器人100对接时,如果洗碗机830正在执行洗碗循环,那么可自动地延迟清空模式的开始。
119.或者,可手动地开始清空模式,通过用户通过按下用户界面124(图2)上的按钮开始清空模式来进行。当洗碗机830在使用中时,当机器人100回到对接站810时,用户将宁愿
延迟清空模式,清空模式的手动开始可能是优选的,例如当装载或者卸载洗碗机830时,或者当洗碗机830正在执行洗碗循环时。用户界面124上的按钮可构造为暂停和重新开始清空模式。当机器人100未对接时,清空模式可由机器人100上的控制器128锁定,以防止清空模式的不小心开始。
120.当机器人100的回收罐118清空时,可使洗碗机泵840自动地断电。例如,回收罐118可设置有液面传感器,当回收罐118空了和清空完成时,液面传感器与对接站810上的控制器或者洗碗机830通信。
121.应指出,虽然将举例说明的实施例的洗碗机830示出为经由垃圾处理装置852排出,但是这并不是系统800的所有实施例中都需要的,在其他实例中,排水管道842可排放至另一管道,例如直接排放到水池850的排水管或者集污器854。还应指出,系统800可包括气隙(未示出),以防止液体回流到洗碗机830中。
122.虽然将系统800示出为带有具有用于机器人100的对接站810的洗碗机830,但是应理解,这里示出的任何实施例的系统可具有用于设置于另一器具上的机器人100的对接站。除了洗碗机830以外的器具的一些非限制性实例包括电冰箱、洗衣机、加湿器,和干衣机。
123.在这里描述的代表性的对接站10、210、310、410、510、810中,当机器人100在对接站10、210、310、410、510、810中对接时,机器人100上的流体耦接件和对接站10、210、310、410、510、810匹配,以引导机器人100和对接站10、210、310、410、510、810之间的液体。例如,这里描述的代表性的对接站10、210、310的液体供应系统包括对接站的壳体上的供水耦接件,其构造为与机器人100上的对应的水接收器耦接件132匹配或者以其他方式耦接,并且这里描述的代表性的对接站410、510、810的处理系统包括对接站的壳体上的废物接收器耦接件,其构造为与机器人100上的对应的废物处理耦接件136匹配或者以其他方式耦接。图15至图16示出了可用于这里描述的流体耦接件的流体耦接组件的一些非限制性实施例。
124.在图15中,流体耦接组件900包括构造为与对应的凹耦接件910匹配或者以其他方式耦接的凸耦接件920。凹耦接件910包括通常关闭的止回阀930。当凸耦接件920由凹耦接件910接收并例如通过泵(其可包括液体供应系统的填充泵或者处理系统的处理泵)施加负压时,止回阀930打开并且液体可流过匹配的耦接件910、920。止回阀930可以是单向止回阀,例如鸭嘴阀。
125.可选地,在凸耦接件920和凹耦接件910之间的界面设置密封件932,以防止液体从流体耦接组件900泄漏。由泵940施加的负压还会增强凸耦接件920和凹耦接件910之前的密封件932。
126.根据流体耦接组件900是用于对接站的液体供应系统还是处理系统,可在对接站10(图1)上或者在机器人100上设置凹接收器或者凹耦接件910。通常,在提供液体的单元上设置凹接收器910,并在接收液体的单元上设置凸接收器或者凸耦接件920,即,包括泵的单元。例如,在液体流体耦接组件900用于液体供应系统(例如系统8)的情况中,凹耦接件910可位于对接站10上,并且凸耦接件920可位于机器人100上。在液体流体耦接组件900用于处理系统(例如系统409)的情况中,凹耦接件910可位于机器人100上,并且凸耦接件920可位于对接站410上。
127.在图16中,流体耦接组件1000包括凸耦接件1020,其构造为与对应的凹耦接件1010匹配或者以其他方式耦接。凸耦接件1020包括通常关闭的装有弹簧的阀1050。当凸耦
接件1020由凹耦接件1010接收时,装有弹簧的阀1050由设置于凹耦接件1010上的机械阀致动器1060打开,并且液体可流过匹配的耦接件1010、1020。阀致动器1060可限定通过凹耦接件1010的流体流道的一部分。通过此流体耦接组件1000,可在对接站上或者在机器人上设置凹接收器或者凹耦接件1010,并且可在另一个对接站上或者在机器人上设置凸接收器或者凸耦接件1020,不管哪个单元提供液体而哪个单元接收液体。
128.参考图17至图20,可在马桶、洗碗机或者其他家用器具中构造在本发明的任何实施例中公开的对接站,或者将对接站改造为现有的马桶、洗碗机,或者其他家用器具。可将用于与本实施例的系统一起使用的机器人100设计为混合在用户的家的浴室或者厨房中。转到图17,例如,机器人100可包括为了整体外观而与马桶或者洗碗机或者对接站周围的橱柜的区域匹配的装饰件1120或者装饰板。在举例说明的实例中,机器人100和对接站1110可构造为与洗碗机1100的踢脚1112或者底部匹配。在另一实例中,对于用于洗碗机的改造的对接站,可提供售后工具包,其中,用户将踢脚1112从其洗碗机1100切除并将其应用于机器人100。其他工具包可与一系列层压板一起提供,以匹配或者对比对接站1110周围的橱柜。另选的实例可使用于机器人真空100的对接站10包含在设备立柱、灯桌,或者家中的其他家具中,以用于当不使用时隐藏机器人。
129.可在家用器具1100的下前侧设置对接站1110,其可包括门1114,使得深度清洁机器人100可前往家用器具1100并与对接站1110对接。家用器具可包括,但不限于,洗碗机、电冰箱、洗衣机、加湿器或者干衣机。为了说明性目的,将家用器具1100示出为洗碗机,并在洗碗机的门1114下方设置对接站。
130.深度清洁机器人100设置有与对接站周围的器具的区域匹配的装饰件(trim piece,剪切件)1120。例如,装饰件1120可与器具面板、烤架、踢脚1112或者其他部件的材料、颜色和表面匹配。装饰件1120可另外地或者另选地与对接站1110的形状匹配,使得当机器人100与对接站1110对接时,如图18所示,通过匹配的或者对比的材料、颜色和表面,装饰件1120可与器具(appliance,器具)1100匹配或者连接以得到无缝的或者接近无缝的视觉外观。
131.制造商可对深度清洁机器人100提供装饰件1120,或者可提供售后工具包,以使用户选择合适的装饰件1120并将其应用于机器人100。在一个非限制性实例中,深度清洁机器人100可具有整体d形状,带有扁平的壁。可在机器人100的扁平的壁上设置装饰件1120。
132.在图19至图20中,在包括至少一个橱柜1200的家用橱柜的下前侧设置对接站1210(其可以是根据任何这里描述的实施例的对接站),使得深度清洁机器人100可前往橱柜1200并与对接站1210对接。家用橱柜包括,但不限于,浴室、厨房、洗衣房或者沾泥物品寄存室中的橱柜。为了说明性目的,在橱柜1200的踢脚1212中,在橱柜1200的抽屉1214下方设置对接站1210;另选位置包括门下方、橱柜1200的门或者抽屉1214中,橱柜1200的侧壁1216中。
133.深度清洁机器人100可设置有与对接站1210周围的橱柜1200的区域匹配的装饰件1220。例如,装饰件1220可与橱柜踢脚1212、抽屉1214或者侧壁1216的材料、颜色和表面匹配。装饰件1220可另外地或者另选地与对接站1210的形状匹配,使得当机器人100与对接站1210对接时,如图20所示,装饰件1220可与橱柜1200匹配或者连接,以通过匹配的或者对比的材料、颜色和表面,得到无缝的或者接近无缝的视觉外观。
134.制造商可对深度清洁机器人提供装饰件1220,或者可提供售后工具包以使用户选择合适的装饰件1220并将其应用于机器人100。其他工具包可与一系列装饰件面板一起提供,以匹配橱柜1200或者与其形成对比。在一个非限制性实例中,深度清洁机器人100可具有整体d形状,带有扁平的壁。可在机器人100的扁平的壁上设置装饰件1220。
135.具有产生于这里描述的设备的各种特征的本发明的若干优点。例如,上述发明的实施例提供自主式深度清洁机器人的自动填充和清空。目前可用的深度清洁器必须由用户手动地填充和清空,如果清洁比水箱容量大的区域,那么在清洁操作过程中有时不止一次。在这里的实施例中公开的自动供应和处理系统提供清洁操作的长期自动化,其包括清空和再填充操作的自动化,这将不需要与用户相互作用或者甚至不需要用户存在而允许清洁继续。
136.本发明的一些实施例的另一优点是,系统平衡已经在大多数家庭和其他建筑物中发现的现有基础设施,并使用马桶来供应清洗液,以从深度清洁机器人疏散废物,和/或对深度清洁机器人的电池再充电。
137.本发明的一些实施例的又一优点是,系统平衡已经在大多数家庭和其他建筑物中发现的现有基础设施,并使用洗碗机来从深度清洁机器人排出废物。
138.进一步指出,可在马桶、洗碗机或者其他家用器具中构造在本发明的任何实施例中公开的对接站,或者将其改造为现有的马桶、洗碗机,或者其他家用器具。用户试图以有限的成功找到隐藏其自主式清洁器的位置。自主式清洁器及其充电站需要可接近所清洁的空间。此组合通常不好看且跨过麻烦。本发明的一方面对当不使用且占据通常不利用的空间时至少部分地隐藏机器人提供了解决方案。
139.虽然这里举例说明的各种实施例示出了一种自主式或者机器人清洁器,但是诸如供应和处理对接站的本发明的方面可在其他类型的具有液体供应和提取系统的地板清洁器上使用,包括非自主式清洁器。更进一步,本发明的方面也可在除了深度清洁器以外的表面清洁设备上使用,例如构造为输送蒸汽而不是液体的设备。
140.在尚未描述的程度来说,这里公开的各种实施例的不同的特征和结构可根据需要彼此组合地使用。一个特征可能未在图示所有实施例中并不意味着解释为其不能用在说明的所有实施例中,而是为了描述简洁而这样做。因此,可根据需要混合并匹配不同实施例的各种特征,以形成新的实施例,不管是否明确地描述了新的实施例。
141.虽然已经结合本发明的一些具体实施例具体地描述了本发明,但是应理解,这是通过例证来进行的,不是限制性的。在不脱离在所附权利要求中定义的本发明的实质的情况下,对于以上公开内容和附图的范围,合理的变化和修改是可能的。因此,与这里公开的实施例相关的具体尺寸和其他物理特征并不被认为是限制性的,除非权利要求明确地提到不是这样。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。