技术特征:
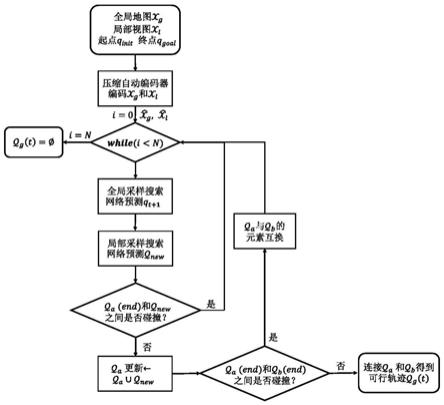
1.一种由数据驱动的采样搜索方法,用于生成无人驾驶汽车的避障安全路径,包括以下步骤:步骤s1、全局地图编码:使用压缩自动编码器来编码全局地图提取全局地图中有关障碍物及其空间状态信息的特征,输出为编码后的全局地图步骤s2、构建全局采样网络搜索预测模型:构建全局采样网络预测模型,该模型由一层输入层,十层隐藏层和一层输出层构成,输入为编码后的全局地图汽车初始位置q
init
和目标位置q
goal
,输出可能包含最优路径解的下一步关键点q
t 1
;使用a*或rrt*等近似最优方法作为专家系统生成演示轨迹指导全局采样网络进行训练;步骤s3、局部地图编码:使用压缩自动编码器来编码以汽车为中心的局部地图提取局部地图中有关障碍物信息的隐含特征,输出为编码后的局部地图步骤s4、构建局部采样网络搜索预测模型:局部采样网络预测模型基于与全局地图网络相同的网络框架,并采用相同的训练策略。输入编码后的局部地图汽车当前位置q
curr
以及局部目标位置q
′
goal
,输出局部可行路径解步骤s5、集成全局采样网络和局部采样网络:将全局采样网络预测的下一步关键点q
t 1
作为局部视图采样搜索网络的局部目标位置输入,使用局部网络预测完整的局部可行路径解全局采样网络为局部采样网络提供全局信息视角下的指导,防止局部采样网络陷入贪婪陷阱(局部最优);而局部采样网络也可以改善全局网络输出关键点的稀疏性;通过迭代循环往复,最终生成更合理、鲁棒性更好的全局可行轨迹。2.如权利要求1所述的一种由数据驱动的采样搜索方法,其特征在于:所述步骤s1包括以下步骤:步骤s1.1、建立基于编码
‑
解码架构的压缩自动编码器,该模型中的编码器f(
·
)包含四个卷积层和一个线性层,解码器g(
·
)包含一个线性层和四个反卷积层,输入为全局地图输出为压缩编码后的全局地图包含障碍物及其空间状态信息等;步骤s1.2、压缩自动编码器的训练只需要利用编码
‑
解码结构来实现无监督学习。首先生成全局地图对应的环境地图图像然后分成小批量集以优化网络的梯度下降。令θ
e
和θ
d
分别表示编码器和解码器参数,则可以使用结合正则化项的均方误差作为模型的损失函数的损失函数其中是正则项,g(f(x))表示编码
‑
解码后的重构地图信息,是重构误差:
3.如权利要求1所述的一种由数据驱动的采样搜索方法,其特征在于:所述步骤s2包括以下步骤:步骤s2.1、基于全局地图的采样搜索预测模型,包含一层输入层,十层隐藏层和一层输出层,其中输入层和每个隐藏层由一个线性层、线性整流relu模块和随机失活dropout模块组成,输出层不包含dropout模块;另外,利用了反馈机制加速网络的收敛;步骤s2.2、将编码后的全局地图初始位置q
init
和目标位置q
goal
作为全局地图网络的输入;在训练阶段,使用a*或rrt*作为专家系统生成的轨迹形成演示轨迹集,基于全局地图网络不断迭代和预测在训练集上找到使得规划路径误差最小的参数θ,并基于反向传播算法对网络参数进行估计,最终使得下列目标函数最小:其中n
p
是演示轨迹中关键点的数量,n是演示路径的总数,为网络预测的采样搜索的关键点,q
*
为演示轨迹中的关键点。4.如权利要求1所述的一种由数据驱动的采样搜索方法,其特征在于:所述步骤s3具体包括:局部地图编码采用与步骤s1相同的基于编码
‑
解码架构的压缩自动编码器,模型中的编码器f(.)也包含四个卷积层和一个线性层,解码器g(.)包含一个线性层和四个反卷积层,输入为局部地图输出为压缩编码后的局部地图包含障碍物及其空间状态信息。5.如权利要求1所述的一种由数据驱动的采样搜索方法,其特征在于:所述步骤s4包括以下步骤:步骤s4.1、基于局部地图的采样搜索预测模型在网络结构上与全局地图网络相同,训练策略也相同,但其网络输入的地图信息是以汽车为中心的局部地图编码步骤s4.2、对数据集中的全局地图信息进行下采样处理,只使用以汽车为中心的7
×
7,11
×
11,15
×
15的局部窗口地图作为压缩自动编码器的输入,并将编码后的局部地图汽车当前位置q
curr
以及局部目标位置q
′
goal
作为网络输入来进行下一步采样搜索的预测。6.如权利要求1所述的一种由数据驱动的采样搜索方法,其特征在于:所述步骤s5包括以下步骤:步骤s5.1、将编码后的全局地图汽车初始位置q
init
和目标位置q
goal
输入全局采样网络,得到合理的关键点q
t 1
;步骤s5.2、将将编码后的局部地图汽车当前位置q
curr
以及全局地图网络预测得到的关键点q
t 1
一并输入局部采样网络,通过迭代更新的机制预测局部窗口内的合理轨迹;步骤s5.3、重复s5.1和s5.2的步骤,直到网络得到合理的全局可行轨迹。7.实现权利要求1的一种由数据驱动的采样搜索方法的系统,其特征在于:包括包括存储器、处理器,以及存储在存储器上并可以在处理器上运行的计算机程序,处理器包括依次连接的全局地图编码模块、全局采样网络搜索预测模型构建模块、局部地图编码模块、局部采样网络搜索预测模型构建模块、全局采样网络和局部采样网络集成模块。
技术总结
一种由数据驱动的采样搜索方法,用于生成无人驾驶汽车的避障安全路径,包括:步骤S1、全局地图编码:步骤S2、构建全局采样网络搜索预测模型:步骤S3、局部地图编码:步骤S4、构建局部采样网络搜索预测模型:步骤S5、集成全局采样网络和局部采样网络。本发明还包括实现一种由数据驱动的采样搜索方法的系统。本发明比传统方法在复杂环境中生成轨迹的速度快几个数量级,规划路径的鲁棒性也更好。规划路径的鲁棒性也更好。规划路径的鲁棒性也更好。
技术研发人员:刘彪 金宇强 付明磊 张文安
受保护的技术使用者:浙江工业大学
技术研发日:2021.07.28
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。