技术特征:
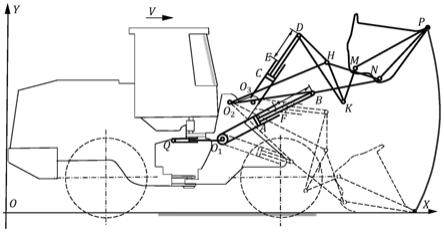
1.一种轮式装载机铲装作业轨迹采集方法,其特征在于,包括如下步骤:1)根据装载机工作装置的反转六连机构设置坐标系及各个铰接点坐标,根据装载机工作装置固定设计参数设置相对坐标;2)实时采集举升油缸位移、转斗油缸位移及车速大小和空间方位;3)将采集得到的数据预处理,并通过从初始位置装载机中心到铲斗齿尖的d
‑
h坐标系总变换矩阵,计算并显示出实时装载机工作装置的作业轨迹。2.如权利要求1所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,步骤1)中,所述根据装载机工作装置的反转六连机构设置坐标系及各个铰接点坐标,具体如下:设置装载机尾部与垂线接触的切线方向为y轴,y轴与地面的接触点为o点,地面方向为x轴,从而建立xoy轴坐标系,则装载机中心位置坐标为q(x
q
,y
q
),装载机前车架与举升油缸连接点坐标o1(x
o1
,y
o1
)、前车架与动臂连接点坐标o2(x
o2
,y
o2
)、前车架与转斗油缸连接点坐标o3(x
o3
,y
o3
)。3.如权利要求2所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,步骤1)中,所述根据装载机工作装置固定设计参数设置相对坐标,包括设置举升油缸与举升杆接触端坐标为a(x
a
,y
a
),举升杆与动臂铰接点坐标b(x
b
,y
b
),转斗油缸与转斗杆接触端坐标c(x
c
,y
c
),转斗杆与摇臂铰接点坐标d(x
d
,y
d
),转斗油缸末端坐标e(x
e
,y
e
),举升油缸末端坐标f(x
f
,y
f
);动臂与摇杆铰接点坐标,h(x
h
,y
h
),摇杆与连杆铰接点坐标k(x
k
,y
k
),连杆与铲斗铰接点坐标,m(x
m
,y
m
),摇臂与铲斗铰接点坐标n(x
n
,y
n
),铲斗的齿尖坐标p(x
p
,y
p
)。4.如权利要求1所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,步骤2)中,采集的升油缸位移和转斗油缸位移包括有举升油缸伸长量l
bf
、转斗油缸伸长量l
ed
、以及装载机中心位置q与举升油缸连接点o1沿x方向前进距离l
o1
。5.如权利要求3所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,步骤3)中,所述d
‑
h坐标系总变换矩阵包括以初始位置装载机中心q经o1到铲斗齿尖p的总变换矩阵为:阵为:
其中:c
n
代表cosθ
n
,s
n
代表sinθ
n
,θ是绕z轴的旋转角,各个关节杆件建立d
‑
h坐标系的z轴,n代表第n个θ对应的角标;α是两个相邻z轴间的角度;a是每一条公垂线的长度。6.如权利要求5所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,所述d
‑
h坐标系总变换矩阵包括以初始位置装载机中心q经o2到铲斗齿尖p的总变换矩阵,具体为:7.如权利要求5所述的一种轮式装载机铲装作业轨迹采集方法,其特征在于,所述d
‑
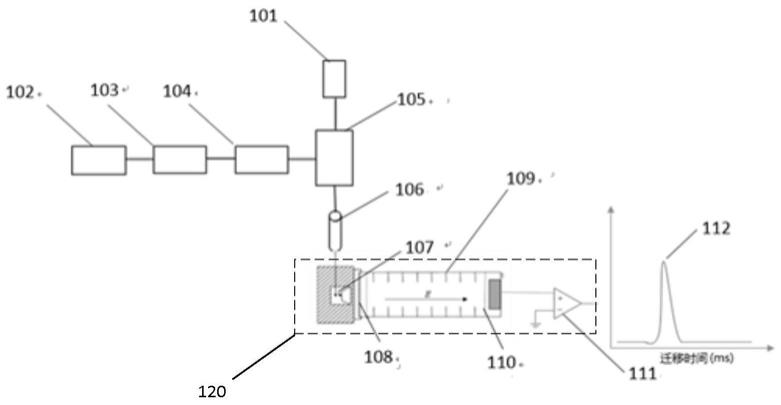
h坐标系总变换矩阵包括以初始位置装载机中心q到o3到铲斗齿尖p的总变换矩阵,具体为:8.一种轮式装载机铲装作业轨迹采集系统,其特征在于,包括数据采集装置,用于实时采集举升油缸位移、转斗油缸位移及车速大小和空间方位;中心数据处理装置,用于将采集得到的数据预处理,并通过从初始位置装载机中心到铲斗齿尖的d
‑
h坐标系总变换矩阵,计算并显示出实时装载机工作装置的作业轨迹。9.如权利要求8所述的一种轮式装载机铲装作业轨迹采集系统,其特征在于,所述数据采集装置包括车速传感器、数据采集仪、第一激光位移传感器和第二激光位移传感器;该车速传感器安装于所述装载机驾驶室外顶部以采集车速大小与空间方位;其中第一激光位移传感器安装于举升油缸以采集举升油缸位移,第二激光位移传感器安装于转斗油缸以采集转斗油缸位移;该数据采集仪与车速传感器和激光位移传感器相连,所述中心数据处理装置与数据采集仪相连。10.如权利要求8所述的一种轮式装载机铲装作业轨迹采集系统,其特征在于,所述中心数据处理装置包括矩阵参数配置模块、作业轨迹转化模块、作业轨迹可视化模块及数据库;该矩阵参数配置模块用于设置坐标系及各个铰接点坐标,根据装载机工作装置固定设计参数设置相对坐标;该作业轨迹转化模块用于将采集得到的数据预处理,并通过从初始位置装载机中心到铲斗齿尖的d
‑
h坐标系总变换矩阵,计算出实时装载机工作装置的作业
轨迹;该作业轨迹可视化模块用于实时显示装载机工作装置的作业轨迹;所述数据库用于存储采集到的数据。
技术总结
一种轮式装载机铲装作业轨迹采集方法和系统,包括如下步骤:1)根据装载机工作装置的反转六连机构设置坐标系及各个铰接点坐标,根据装载机工作装置固定设计参数设置相对坐标;2)实时采集举升油缸位移、转斗油缸位移及车速大小和空间方位;3)将采集得到的数据预处理,并通过从初始位置装载机中心到铲斗齿尖的D
技术研发人员:王少杰 殷月 侯亮 余圣锋
受保护的技术使用者:厦门大学
技术研发日:2021.08.17
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。