1.本发明涉及雷达极化信息处理技术领域,具体是一种目标散射结构的旋转域识别方法和装置。
背景技术:
2.极化雷达通过收发一组极化状态正交的电磁波,能够获得目标的极化信息,在目标散射机理解译、特征参数反演、目标探测与识别等领域发挥着重要作用,已经成为对地观测、防空反导、气象探测、海面监测等诸多重要领域的主流传感器,得到了广泛应用。
3.极化雷达获得的目标极化信息可以由极化散射矩阵进行表征。不同极化通道间的极化相关特征,敏感于目标姿态与雷达视线的相对几何关系。对同一目标,当其相对于极化雷达视线的姿态不同时,其极化散射特性可能显著不同。这种现象给雷达极化信息处理与应用造成诸多不便,是当前极化雷达目标极化散射机理精细解译和定量应用面临的技术瓶颈之一。将特定成像几何条件下获得的极化数据在绕雷达视线方向进行旋转,将其扩展到极化旋转域进行分析,有望挖掘目标隐含的极化信息并实现目标结构识别,成为提升目标散射机理解译与应用性能的关键。因此,发展一种目标散射结构的旋转域识别方法和装置有重大价值。
技术实现要素:
4.为精细解译目标在绕雷达视线旋转域中的散射特性,本发明提供一种目标散射结构的旋转域识别方法和装置。本发明将极化相关特征在极化旋转域进行可视化处理和参数化刻画,可由此提取极化旋转域特征并有效区分雷达目标,可适用于多种用途(如对空监视、对地观测、气象探测、海面监视等)的极化雷达系统,并在空中目标分类识别、地物类别鉴别、损毁评估等领域具有应用价值。
5.为实现上述目的,本发明采用的技术方案如下:
6.一种目标散射结构的旋转域识别方法,包括:
7.极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理,计算目标旋转极化散射矩阵及其对应的极化相关方向图;
8.基于每个典型结构的理想极化散射矩阵,计算各典型结构的兼顾极化测量误差的极化散射矩阵,并将其绕极化雷达视线方向进行旋转处理,计算各典型结构的兼顾极化测量误差的旋转极化散射矩阵及其对应的广义极化相关方向图;
9.从目标极化散射矩阵对应的极化相关方向图以及各典型结构的兼顾极化测量误差的广义极化相关方向图中分别提取旋转不变特征,构建目标特征矢量以及各典型结构的特征编码矢量;
10.将目标特征矢量和各典型结构的特征编码矢量进行相似度度量,得到目标特征矢量对应的典型结构类型。
11.另一方面,本发明提供一种目标散射结构的旋转域识别装置,包括:
12.第一计算模块,用于将极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理,计算目标旋转极化散射矩阵及其对应的极化相关方向图;
13.第二计算模块,用于基于每个典型结构的理想极化散射矩阵,计算各典型结构的兼顾极化测量误差的极化散射矩阵,并将其绕极化雷达视线方向进行旋转处理,计算各典型结构的兼顾极化测量误差的旋转极化散射矩阵及其对应的广义极化相关方向图;
14.特征矢量构建模块,用于从目标极化散射矩阵对应的极化相关方向图以及各典型结构的兼顾极化测量误差的广义极化相关方向图中分别提取旋转不变特征,构建目标特征矢量以及各典型结构的特征编码矢量;
15.识别模块,用于将目标特征矢量和各典型结构的特征编码矢量进行相似度度量,得到目标特征矢量对应的典型结构类型。
16.本发明具有的有益技术效果:
17.本发明能够可视化和参数化刻画目标极化相关值在绕雷达视线旋转域中的散射特性,并通过构建极化旋转不变特征编码为后续目标结构识别等应用服务。本发明实现简单方便,可直接应用于具有不同用途的极化雷达系统获得的目标极化散射矩阵数据。本发明对于对地观测、海面监视、减灾防灾等应用领域都有重要的参考价值。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
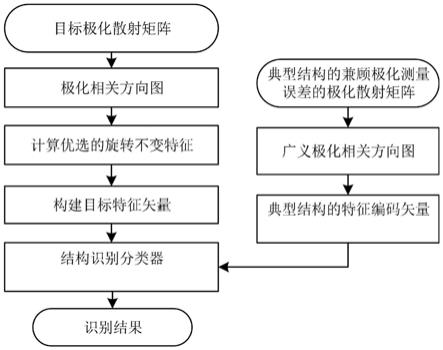
19.图1是本发明一实施例的实施流程图;
20.图2是本发明一实施例中典型散射结构的极化相关方向图,其中(a1)至(a7)分别代表三面角、二面角、偶极子、圆柱、窄二面角、四分之一波器件和螺旋散射体的其中(b1)至(b7)分别代表三面角、二面角、偶极子、圆柱、窄二面角、四分之一波器件和螺旋散射体的
21.图3无人机电磁仿真数据的模型和pauli图,其中(a)代表无人机电磁仿真数据的模型,(b)代表正视时无人机isar图像对应的pauli图,(c)代表斜视时无人机isar图像对应的pauli图;
22.图4无人机电磁仿真数据的识别结果对比,其中(a1)代表斜视时无人机isar图像利用cameron方法得到的无人机电磁仿真数据的识别结果;(a2)代表斜视时无人机isar图像利用本发明方法得到的无人机电磁仿真数据的识别结果;(b1)代表正视时无人机isar图像利用cameron方法得到的无人机电磁仿真数据的识别结果;(b2)代表正视时无人机isar图像利用本发明方法得到的无人机电磁仿真数据的识别结果。
23.图5l波段alos
‑
2全极化sar数据的识别结果对比,其中(a)代表原始光学图像;(b)代表利用cameron方法得到的识别结果;(c)代表利用本发明方法得到的识别结果。
24.本发明目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
25.为了使本公开发明的目的、技术方案和优点更加清楚明白,下面结合具体实施例,并根据附图,对本发明进一步详细说明。需要说明的是,在附图或说明书描述中,未描述的内容以及部分英文简写为所属技术领域中普通技术人员所熟知的内容。本实施例中给定的一些特定参数仅作为示范,在不同的实时方式中该值可以相应地改变为合适的值。
26.本发明的基本思路是:极化数据中两极化通道之间的相关特征敏感于目标姿态与雷达视线的相对几何关系。同一目标在不同姿态条件下,其极化相关特征的取值可能会发生显著变化。将特定成像几何条件下获取的极化散射矩阵绕雷达视线进行旋转处理,能够改变目标姿态与雷达视线的相对几何关系。通过遍历绕雷达视线旋转域中的每一个旋转角,能够得到旋转域中的极化相关值序列。对旋转域中的极化相关值序列进行可视化处理和参数化刻画,可以完整地描述目标极化相关值在旋转域中的变化特性,精细解译目标在极化旋转域中的散射机理。由此可实现极化旋转域特征提取和目标结构识别,进而用于物理参数反演和目标识别分类等领域。
27.图1是本发明一实施例的实施流程图,一种目标散射结构的旋转域识别方法,包括以下步骤:
28.第一步,极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理,计算目标的极化相关方向图;
29.第二步,基于每个典型结构的理想极化散射矩阵,计算各典型结构的兼顾极化测量误差的极化散射矩阵,并将其绕极化雷达视线方向进行旋转处理,计算各典型结构的兼顾极化测量误差的旋转极化散射矩阵及其对应的广义极化相关方向图;
30.第三步,从目标极化散射矩阵对应的极化相关方向图以及各典型结构的兼顾极化测量误差的广义极化相关方向图中分别提取旋转不变特征,构建目标特征矢量以及各典型结构的特征编码矢量;
31.第四步,将目标特征矢量和各典型结构的特征编码矢量进行相似度度量,得到目标特征矢量对应的典型结构类型。
32.第一步中,极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理,得到的目标旋转极化散射矩阵,为:
[0033][0034]
其中θ为旋转角,θ∈[
‑
π,π];旋转矩阵上标t为转置处理,s为目标极化散射矩阵,h和v代表任意两种不同的极化通道,s
hh
为在h极化发射和h极化接收条件下获取的复后向散射系数;s
vh
为在v极化发射和h极化接收条件下获取的复后向散射系数;s
hv
为在h极化发射和v极化接收条件下获取的复后向散射系数;s
vv
为在v极化发射和v极化接收条件下获取的复后向散射系数。
[0035]
极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理目标旋转极化散射矩阵s(θ)的各元素在旋转域中的表达式为:
[0036]
s
hh
(θ)=s
hh
cos2θ s
hv
cosθsinθ s
vh
cosθsinθ s
vv
sin2θ
[0037]
s
hv
(θ)=
‑
s
hh
cosθsinθ s
hv
cos2θ
‑
s
vh
sin2θ s
vv
cosθsinθ
[0038]
s
vh
(θ)=
‑
s
hh
cosθsinθ
‑
s
hv
sin2θ s
vh
cos2θ s
vv
cosθsinθ
[0039]
s
vv
(θ)=s
hh
sin2θ
‑
s
hv
cosθsinθ
‑
s
vh
cosθsinθ s
vv
cos2θ
[0040]
将旋转域中的旋转角θ进行离散化处理,得到离散化的旋转角序列θ
i
,n的取值根据实际情况确定。
[0041]
计算旋转角序列θ
i
对应的极化相关特征序列,得到极化旋转域中任意两极化通道s1和s2的极化相关方向图
[0042][0043]
在满足s
hv
=s
vh
互易性条件下,可推导出3个极化相关方向图,即即和由于存在以下等价关系因此有两个独立的极化相关方向图,即:
[0044][0045][0046]
其中,
·
为集合平均处理,
·
为取绝对值处理,上标*为共轭处理。
[0047]
将旋转角序列θ
i
及其对应的极化相关特征序列在极坐标系中进行表示,即得到极化旋转域中极化相关特征的可视化图。极化旋转域中极化相关特征的可视化图表征了极化雷达目标在绕雷达视线旋转域中的散射特性。
[0048]
为便于利用极化相关方向图,提取原始极化相关特征值、极化相关特征最大值、极化相关特征最小值、极化相关度、极化相关起伏度、极化相关对比度、极化相关反熵、最大化旋转角、最小化旋转角、极化相关宽度对其进行参数化刻画,具体如下:
[0049]
(1)原始极化相关特征值为:
[0050][0051]
(2)极化相关特征最大值为:
[0052][0053]
(3)极化相关特征最小值为:
[0054][0055]
(4)极化相关度为:
[0056][0057]
(5)极化相关起伏度为:
[0058][0059]
(6)极化相关对比度为:
[0060][0061]
(7)极化相关反熵为:
[0062][0063]
(8)最大化旋转角为:
[0064][0065]
(9)最小化旋转角为:
[0066][0067]
(10)极化相关宽度为:
[0068][0069]
其中,max{
·
}为求序列的最大值;min{
·
}为求序列的最小值;mean{
·
}为求序列的均值;std{
·
}为求序列的标准差。
[0070]
第二步中,关于典型散射结构的种类以及数量,本领域技术人员可以根据需求设定。参照图2,在本发明一优选实施例中,所选取的典型散射结构有7种,包括三面角、二面角、偶极子、圆柱、窄二面角、四分之一波器件和螺旋散射体。各典型结构的理想极化散射矩阵和对应的极化相关方向图如下表所示。
[0071][0072][0073]
理论上,三面角结构具有绕雷达视线的旋转不变特性,共极化相关方向图为圆状。相比之下,二面角具有明显的方向性效应,呈周期性变化。上述差异是由二者不同的散射机理导致的。不同典型结构具有不同的极化旋转域特性,这为区分它们提供了理论依据。
[0074]
由于极化雷达是多通道系统,在实际测量过程中通常会受到交叉耦合、通道不平衡等非理想因素的影响,从而影响目标结构解译。此外,极化校准后系统仍会存在测量误差。考虑到极化隔离度和极化通道不平衡因素,第k个典型结构的兼顾极化测量误差的极化
散射矩阵,为:
[0075][0076]
其中,δ为极化隔离度,a为极化通道幅度和相位不平衡,n为系统噪声,为简化讨论,认为噪声是可以忽略的。为第k个典型结构的理想极化散射矩阵,h和v代表任意两种不同的极化通道,为第k个典型结构在h极化发射和h极化接收条件下获取的复后向散射系数;为第k个典型结构在v极化发射和h极化接收条件下获取的复后向散射系数;为第k个典型结构在h极化发射和v极化接收条件下获取的复后向散射系数;为第k个典型结构在v极化发射和v极化接收条件下获取的复后向散射系数。
[0077]
第k个典型结构的兼顾极化测量误差的旋转极化散射矩阵,为:
[0078][0079]
其中θ为旋转角,θ∈[
‑
π,π];旋转矩阵上标t为转置处理;
[0080]
旋转极化散射矩阵m
k
(θ)的各元素在旋转域中的表达式为:
[0081][0082][0083][0084][0085]
将旋转域中的旋转角θ进行离散化处理,得到离散化的旋转角序列θ
i
,计算旋转角序列θ
i
对应的极化相关特征序列,得到极化旋转域中旋转极化散射矩阵m
k
(θ)对应的广义极化相关方向图,表征为:
[0086][0087][0088]
极化测量误差会影响典型结构的极化相关方向图。对于一个确定的极化雷达系统,极化隔离度和极化通道不平衡参数是已知的。同样的可以从广义极化相关方向图中提取极化旋转域极化相关特征,包括原始极化相关特征值、极化相关特征最大值、极化相关特征最小值、极化相关度、极化相关起伏度、极化相关对比度、极化相关反熵、最大化旋转角、最小化旋转角、极化相关宽度。
[0089]
本发明第三步中从目标极化散射矩阵对应的极化相关方向图以及各典型结构的
兼顾极化测量误差的广义极化相关方向图中提取旋转不变特征用于构建目标特征矢量以及各典型结构的特征编码矢量。在极化旋转域极化相关特征中,有7个旋转不变特征,包括极化相关特征最大值、极化相关特征最小值、极化相关度、极化相关起伏度、极化相关对比度、极化相关反熵和极化相关宽度。本领域技术人员可以根据现有知识从中选择多个旋转不变特征用于构建目标特征矢量以及各典型结构的特征编码矢量。
[0090]
在本发明一实施例中,利用上述7个旋转不变特征,以“类间距最大化”为准则,进行特征优选。选择出使得每两类的类间距最大的特征,对所选特征进行累积。分别将范围
‑
40db~
‑
5db(间隔0.1db)的极化隔离度,范围0db~5db(间隔0.1db)的幅度不平衡和范围0
°
~30
°
(间隔0.1
°
)的相位不平衡添加到每个典型结构的理想极化散射矩阵,构建样本数据集。这七个典型结构可以形成21对结构。特征选择结果下表所示,括号中的数字表示特征被选中的次数。
[0091][0092]
最后,优选出极化相关度极化相关起伏度极化相关宽度极化相关最小值极化相关反熵这5个极化旋转不变特征用于构建构建目标特征矢量以及各典型结构的特征编码矢量。即在本发明一实施例的第三步中,从目标极化散射矩阵对应的极化相关方向图以及各典型结构的兼顾极化测量误差的广义极化相关方向图中分别提取极化相关度极化相关起伏度极化相关宽度极化相关最小值极化相关反熵这5个极化旋转不变特征构建目标特征矢量w以及各典型结构的特征编码矢量v
k
:
[0093][0094]
其中计算极化相关度极化相关起伏度极化相关宽度极化相关最小值极化相关反熵的公式如前述(1)至(10)中所示,在此不再赘述。
[0095]
每个典型结构对应的特征矢量定义为特征编码矢量。可以得到不同测量误差下的特征编码矢量。例如,一具体实施例中,得到的极化隔离度为
‑
40db的特征编码矢量为:
[0096][0097]
其中,v
k
为第k类典型结构的特征编码矢量,k=1,2,3,4,5,6,7分别代表三面角、二面角、偶极子、圆柱、窄二面角、四分之一波器件和螺旋散射体。
[0098]
通过特征编码矢量可以区分7类典型结构。第四步中,将目标特征矢量与各典型结构的特征编码矢量进行相似性度量,选取相距最近的理论值,其对应的结构类型即为目标的结构类型:
[0099][0100]
其中,w为测量得到的目标特征矢量,d则指示了使距离最小的特征编码矢量所对应的典型结构。
[0101]
图3为无人机电磁仿真数据的模型和pauli图。其中(a)为无人机为全金属模型。仿真中心频率10ghz,带宽4ghz,俯仰角0
°
。图3中的(b)和(c)分别为方位角0
°
和45
°
时,即正视和斜视时无人机isar图像对应的pauli图。
[0102]
图4为无人机电磁仿真数据的识别结果对比图,其中(a1)代表斜视时无人机isar图像利用cameron方法得到的无人机电磁仿真数据的识别结果;(a2)代表斜视时无人机isar图像利用本发明方法得到的无人机电磁仿真数据的识别结果;(b1)代表正视时无人机isar图像利用cameron方法得到的无人机电磁仿真数据的识别结果;(b2)代表正视时无人机isar图像利用本发明方法得到的无人机电磁仿真数据的识别结果。雷达图像中的散射中心表现为具有局部峰值强度的像素,因此将图像中各能量强点作为独立散射中心。在正视图中,机翼和机身交接处的4个散射中心对应的是窄二面角结构,而cameron方法将其中一个散射中心判定为四分之一波器件。这是不符合无人机整体的对称性。在斜视图中,红色标注区域为无人机天线部分,应为偶极子结构。本发明散射类型判别结果基本与实际结构相符合,这验证了本发明在目标结构的识别上具有较高精度。
[0103]
图5为l波段alos
‑
2全极化sar数据的识别结果对比图。该数据集于2018年8月21日在旧金山地区获得,数据的标称分辨率为5.1m
×
4.3m(距离向
×
方位向)。选取一个含有舰船目标的区域,数据大小为50
×
120像素,光学图像如图5中的(a)所示,分别利用cameron分解方法与本发明得到的识别结果如图5中的(b)和图5中的(c)所示。舰船的尾部和侧面主要由偶次散射机理组成,对应于二面角和窄二面角结构。甲板上有圆柱结构,同时一些局部结构为四分之一波器件。红色椭圆标记的区域应分别为平板结构和圆柱结构。与cameron分解相比,本发明更能准确地识别出目标的结构类型。对比实验进一步验证了旋转域方法可有效应用于雷达目标识别。
[0104]
本发明一实施例提供一种目标散射结构的旋转域识别装置,包括:
[0105]
第一计算模块,用于将极化雷达获得的目标极化散射矩阵绕极化雷达视线方向进行旋转处理,计算目标旋转极化散射矩阵及其对应的极化相关方向图;
[0106]
第二计算模块,用于基于每个典型结构的理想极化散射矩阵,计算各典型结构的兼顾极化测量误差的极化散射矩阵,并将其绕极化雷达视线方向进行旋转处理,计算各典型结构的兼顾极化测量误差的旋转极化散射矩阵及其对应的广义极化相关方向图;
[0107]
特征矢量构建模块,用于从目标极化散射矩阵对应的极化相关方向图以及各典型结构的兼顾极化测量误差的广义极化相关方向图中分别提取旋转不变特征,构建目标特征矢量以及各典型结构的特征编码矢量;
[0108]
识别模块,用于将目标特征矢量和各典型结构的特征编码矢量进行相似度度量,得到目标特征矢量对应的典型结构类型。
[0109]
以上各组成模块的实现方法与前面所述目标散射结构的旋转域识别方法中对应步骤的实现方法相同,在此不再赘述。
[0110]
以上包含了本发明优选实施例的说明,这是为了详细说明本发明的技术特征,并不是想要将发明内容限制在实施例所描述的具体形式中,依据本发明内容主旨进行的其他修改和变型也受本专利保护。本发明内容的主旨是由权利要求书所界定,而非由实施例的具体描述所界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。