1.本发明涉及雷达极化信息处理技术领域,具体是一种目标散射结构零极化辨识方法与装置。
背景技术:
2.极化是电磁波除幅度、频率、相位之外的另一重要属性。极化信息的获取使得对目标极化散射机理进行完整刻画成为可能,对目标散射机理解译具有重要意义。
3.目标最优极化是雷达极化问题研究的重要理论基础。对于一个具有对称完全相干的散射矩阵的目标,可以得到与其对应的五组特征极化状态:一对共极化零点、一个共极化最大值点和一个共极化鞍点、一组交叉极化最大值点、一组交叉极化鞍点以及一组交叉极化零点。共极化零点又称目标零极化,是目标最优极化的重要组成部分。目标最优极化的概念最早由kennaugh于1952年首次提出,主要针对单静态互易性条件下天线的最优极化。1970年,huynen在kennaugh理论的基础上提出了雷达目标唯象学方法,并利用poincare球和stokes矢量来表征电磁波的极化状态,提出了极化叉的概念。20世纪80年代,boerner等人将目标最优极化的概念扩展到双静态,非互易以及非相干的情况。随后,boerner、van zyl、mott和yamaguchi等人针对特征极化开展了深入研究,使得目标最优极化的理论不断完善。在此基础上,杨健等研究了特征极化状态在poincare球的几何位置关系并发展了利用kennaugh矩阵和stokes矢量求解特征极化状态的方法,提出了等功率曲线的概念。
4.目前为止,关于零极化的研究主要集中在基本概念和理论推导等方面,而零极化在目标散射结构辨识方面的应用研究相对较少。
技术实现要素:
5.本发明目的是提供一种目标散射结构零极化辨识方法与装置。本发明该方法利用零极化三维响应特征图可视化表征方法,揭示典型散射结构的零极化差异,提取零极化响应特征矢量,根据目标散射中心和典型散射结构的零极化响应特征的差异,实现目标的散射结构准确辨识。
6.为实现上述目的,本发明采用的技术方案如下:
7.一种目标散射结构的旋转域识别方法,包括:
8.基于极化雷达数据,提取目标的强散射中心及其对应的极化散射矩阵;
9.对强散射中心其极化散射矩阵进行极化旋转补偿处理;
10.基于各典型散射结构的极化散射矩阵及其对应的零极化矢量,构建各典型散射结构的零极化三维响应特征图,从中提取各典型散射结构的零极化响应特征矢量;
11.基于旋转补偿处理后的强散射中心的极化散射矩阵,构建其对应的零极化三维响应特征图,从中提取强散射中心的零极化响应特征矢量;
12.计算强散射中心的零极化响应特征矢量与各典型散射结构的零极化响应特征矢量之间的距离;
13.根据距离最小原则,找出所有典型散射结构中与强散射中心距离最近的典型散射结构,作为该强散射中心的散射结构类型。
14.另一方面,本发明提供一种目标散射结构零极化辨识装置,包括:
15.第一提取模块,用于基于极化雷达数据,提取强散射中心及其对应的极化散射矩阵;
16.极化旋转补偿模块,用于对强散射中心其极化散射矩阵进行极化旋转补偿处理;
17.第二提取模块,用于基于各典型散射结构的极化散射矩阵及其对应的零极化矢量,构建各典型散射结构的零极化三维响应特征图,从中提取各典型散射结构的零极化响应特征矢量;
18.第三提取模块,基于旋转补偿处理后的强散射中心的极化散射矩阵,构建其对应的零极化三维响应特征图,从中提取强散射中心的零极化响应特征矢量;
19.距离计算模块,用于计算强散射中心的零极化响应特征矢量与各典型散射结构的零极化响应特征矢量之间的距离;
20.结果输出模块,用于根据距离最小原则,找出所有典型散射结构中与强散射中心距离最近的典型散射结构,作为该强散射中心的散射结构类型。
21.以上各组成模块的实现方法与前面所述目标散射结构的旋转域识别方法中对应步骤的实现方法相同,在此不再赘述。
22.本发明具有的有益技术效果:
23.发明通过构建零极化三维响应特征图,提取零极化响应特征矢量,根据极化雷达目标散射中心和典型散射结构的差异,得到散射中心的散射类型识别结果,实现对极化雷达目标散射结构的辨识。本发明针对极化雷达目标散射结构辨识,识别结果较为准确,可直接对各种全极化雷达系统获得的不同目标的数据进行处理。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
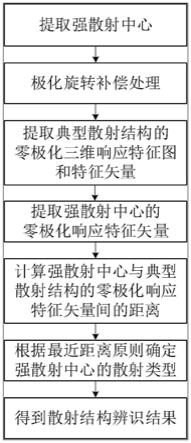
25.图1是本发明一实施例的实施流程图;
26.图2是本发明一实施例中典型散射结构的零极化三维响应特征图,其中(a)为三面体的零极化三维响应特征图,(b)为二面体的零极化三维响应特征图,(c)为圆柱体的零极化三维响应特征图,(d)为窄二面体的零极化三维响应特征图,(e)为左螺旋散射结构的零极化三维响应特征图,(f)为第一1/4波器件的零极化三维响应特征图,(g)为第二1/4波器件的零极化三维响应特征图,(h)为水平偶极子的零极化三维响应特征图,(i)为垂直偶极子的零极化三维响应特征图,(j)为右螺旋散射结构的零极化三维响应特征图;
27.图3是对比实验一所用的电磁计算数据的四种车辆模型,其中(a)为camry(中型轿车)模型,(b)为maxima(大型轿车)模型,(c)为sentra(小型轿车)模型,(d)为mazdampv(多功能旅行车)模型;
28.图4是对比实验一中对camry(中型轿车)模型分别利用cameron分解方法以及本发
明方法得到的散射结构辨识结果图,其中(a)为cameron分解方法得到的cameron分解结果,(b)为本发明方法得到的零极化散射结构辨识结果;
29.图5是对比实验一中对maxima(大型轿车)模型分别利用cameron分解方法以及本发明方法得到的散射结构辨识结果图,其中(a)为cameron分解方法得到的cameron分解结果,(b)为本发明方法得到的零极化散射结构辨识结果;
30.图6是对比实验一中对sentra(小型轿车)模型分别利用cameron分解方法以及本发明方法得到的散射结构辨识结果图,其中(a)为cameron分解方法得到的cameron分解结果,(b)为本发明方法得到的零极化散射结构辨识结果;
31.图7是对比实验一中对mazdampv(多功能旅行车)模型分别利用cameron分解方法以及本发明方法得到的散射结构辨识结果图,其中(a)为cameron分解方法得到的cameron分解结果,(b)为本发明方法得到的零极化散射结构辨识结果;
32.图8是对比实验二所用的电磁仿真数据的无人机模型以及pauli图像,其中(a)为无人机模型,(b)为pauli图像;
33.图9是对比实验二中利用cameron分解方法以及本发明方法得到的散射结构辨识结果图,其中(a)为cameron分解方法得到的cameron分解结果,(b)为本发明方法得到的零极化散射结构辨识结果;
34.本发明目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
35.为了使本公开发明的目的、技术方案和优点更加清楚明白,下面结合具体实施例,并根据附图,对本发明进一步详细说明。需要说明的是,在附图或说明书描述中,未描述的内容以及部分英文简写为所属技术领域中普通技术人员所熟知的内容。本实施例中给定的一些特定参数仅作为示范,在不同的实时方式中该值可以相应地改变为合适的值。
36.本发明的基本思路是:提取极化雷达数据中目标的强散射中心,构建零极化三维响应特征图,提取零极化响应特征矢量。将散射中心的零极化响应特征矢量与典型散射结构进行匹配,构建距离度量准则,根据最小距离原则确定散射中心的散射结构类型,从而实现人造目标散射结构辨识。
37.具体而言,本发明针对全极化雷达的目标极化散射矩阵数据,首先提取目标的散射中心,得到散射中心的位置和极化散射矩阵。利用零极化三维响应特征图分析散射结构的差异,提取零极化响应特征矢量。构建距离度量方法,分析散射中心的零极化响应特征矢量与典型散射结构之间的差异,识别出散射中心对应的散射类型,从而实现目标散射结构的辨识。
38.图1是本发明一实施例的实施流程图,一种目标散射结构的旋转域识别方法,包括以下步骤:
39.第一步,基于极化雷达数据,提取目标的强散射中心及其对应的极化散射矩阵;
40.第二步,对强散射中心其极化散射矩阵进行极化旋转补偿处理;
41.第三步,基于各典型散射结构的极化散射矩阵及其对应的零极化矢量,构建各典型散射结构的零极化三维响应特征图,从中提取各典型散射结构的零极化响应特征矢量;
42.第四步,基于旋转补偿处理后的强散射中心的极化散射矩阵,构建其对应的零极
化三维响应特征图,从中提取强散射中心的零极化响应特征矢量;
43.第五步,计算强散射中心的零极化响应特征矢量与各典型散射结构的零极化响应特征矢量之间的距离;其中,本实施例将强散射中心的零极化响应特征矢量与典型散射结构的零极化响应特征矢量的差的二范数作为二者之间的距离。
44.第六步,根据最小距离原则,找出所有典型散射结构中与强散射中心距离最近的典型散射结构,作为该强散射中心的散射结构类型;
45.第七步,根据强散射中心对应的散射结构类型得到目标散射结构辨识的结果。
46.第一步中提取目标的强散射中心的方法不限,可以采用本技术领域中已有方法实现。在本发明一实施例中,提取强散射中心及其对应的极化散射矩阵,包括:
47.设置强散射中心之间的最小间隔d0及强散射中心数目n
s
;
48.计算极化雷达数据中各像素点的极化散射矩阵对应的总能量,选择极化散射矩阵总能量最大的像素点作为强散射中心;
49.令距离强散射中心间隔为d0的所有像素点的极化散射矩阵对应的总能量为0,选择剩余像素点中极化散射矩阵总能量最大的像素点作为下一个强散射中心,依次规律,不断寻找下一个强散射中心,直至得到n
s
个极化雷达数据中的强散射中心。
50.其中散射矩阵总能量计算如下,设散射矩阵为s,其中s
hv
是垂直极化发射、水平极化接收的后向散射系数,s
vh
是水平极化发射、垂直极化接收的后向散射系数,s
hh
是垂直极化发射,垂直极化接收的后向散射系数,s
vv
是水平极化发射,水平极化接收的后向散射系数,则散射矩阵的总能量span=|s
hh
|2 |s
hv
|2 |s
vh
|2 |s
vv
|2。
51.对强散射中心其极化散射矩阵进行极化旋转补偿处理的方法不限,可以采用本技术领域中已有方法实现。在本发明一实施例中,对强散射中心其极化散射矩阵进行极化旋转补偿处理,包括:
52.极化散射矩阵绕极化雷达视线方向进行旋转,得到极化方位角θ;
53.构建旋转矩阵r(θ)对极化散射矩阵进行旋转补偿处理,得到旋转补偿处理后的强散射中心的极化散射矩阵s0:s0=r(
‑
θ)sr(θ),其中,
54.关于典型散射结构的种类以及数量,本领域技术人员可以根据需求设定。参照图2,在本发明一优选实施例中,所选取的典型散射结构有10种,包括三面角、二面角、圆柱体、窄二面角、第一1/4波器件、第二1/4波器件、水平偶极子、垂直偶极子、左螺旋和右螺旋散射结构。其中,所述10种典型散射结构的极化散射矩阵分别为结构。其中,所述10种典型散射结构的极化散射矩阵分别为
其中所述10种典型散射结构对应的零极化矢量有14个,分别为:
[0055][0055][0055][0055][0056]
图2为典型散射结构的零极化三维响应特征图。从这些典型散射结构的三维响应特征图可以看到,散射结构的极化响应均只在零极化所在的位置达到最小值,呈现“凹口状”,凹口最低点接近于零,远小于其他位置的极化响应,且凹口较窄。不同散射结构的凹口出现的位置具有显著的差异。其中,水平偶极子的零极化极化比为∞,且在0的位置响应最强,因此在图示的平面区域内,零极化响应呈下降趋势。垂直偶极子和水平偶极子的极化响应特征相反,零极化位于极化比等于0的位置。左螺旋和右螺旋散射结构的零极化分别与三面角的两个零极化对应,但是螺旋散射结构在未归一化之前本身的强度稍高于三面角。
[0057]
关于提取各典型散射结构的零极化响应特征矢量的方法,本领域技术人员可以采用本技术领域中已有方法实现。在本发明一优选实施例中,采用的提取各典型散射结构的零极化响应特征矢量的方法,包括:
[0058]
设复极化比平面的任一点ρ=re(ρ) j
·
im(ρ),其中re(ρ)∈[
‑
3,3],im(ρ)∈[
‑
3,3];构建复极化比ρ对应的极化矢量h,
[0059]
对于第m个典型散射结构,其对应的共极化响应特征p(ρ)=|h
t
s
m
h|2,其中s
m
(m=1,2,...10)为第m个典型散射结构的极化散射矩阵;
[0060]
在三维坐标系中,绘制第m个典型散射结构的零极化三维响应特征图,零极化三维响应特征图上任一点的坐标为(re(ρ),im(ρ),p(ρ));
[0061]
提取第m个典型散射结构的极化散射矩阵s
m
在各零极化矢量h
n
(n=1,2,...14)处的极化响应p
m,n
,并组合成第m个典型散射结构的零极化响应特征矢量u
m
=[p
m,1
,p
m,2
,...,p
m,14
]。
[0062]
关于提取强散射中心的零极化响应特征矢量的方法,本领域技术人员可以采用本技术领域中已有方法实现。在本发明一优选实施例中,采用与提取各典型散射结构的零极化响应特征矢量相同的方法实现,具体包括:
[0063]
设复极化比平面的任一点ρ=re(ρ) j im(ρ),其中re(ρ)∈[
‑
3,3],im(ρ)∈[
‑
3,
3];构建复极化比ρ对应的极化矢量h,
[0064]
计算第k个强散射中心其对应的共极化响应特征p
′
(ρ)=|h
t
s0h|2,其中s0为旋转补偿处理后的第k个强散射中心的极化散射矩阵;
[0065]
三维坐标系中,绘制第k个强散射中心的零极化三维响应特征图,零极化三维响应特征图上任一点的坐标为(re(ρ),im(ρ),p
′
(ρ));
[0066]
提取旋转补偿处理后的第k个强散射中心的极化散射矩阵s0在各零极化矢量h
n
(n=1,2,...14)处的极化响应p
k,n
,并组合成强散射中心的零极化响应特征矢量v
k
(k=1,2,...,n
s
),则v
k
=[p
k,1
,p
k,2
,...,p
k,14
]。
[0067]
图3为电磁仿真数据用到的车辆模型。数据为美国空军实验室(afrl)公布的cvdomes电磁仿真数据,包括了10种常见的车辆,涵盖了轿车、suv、货卡车、旅行车、厢货车等多种类型。本实验选取其中具有代表性的4种车辆数据进行分析,分别是camry(中型轿车)、maxima(大型轿车)、sentra(小型轿车)和mazdampv(多功能旅行车)。cvdomes数据的主要仿真参数如表1。
[0068]
表1 cvdomes数据主要参数
[0069][0070]
图4~7中是上述四种车辆的散射结构辨识结果。由于叠掩现象的存在,车辆目标由两圈轮廓组成,其中外轮廓主要是由于车顶反射的回波先到达雷达接收端,在成像结果中相对于车轮所在的内轮廓更加靠近外侧。在散射结构辨识结果中,四种车辆的外轮廓均正确识别为三面角/平板。而内轮廓的散射结构相对复杂,不同车辆的差异较大。对于车辆目标camry,内轮廓主要散射结构为车身和地面形成的二面角和窄二面角结构,车身反光镜和车窗等位置形成了偶极子以及圆柱体等散射结构,零极化散射结构辨识结果和cameron分解结果基本相似,二者的主要差异位于车身前侧车灯位置,零极化散射结构辨识方法能够正确将其识别为圆柱体结构,并且与下侧的圆柱体结构相对称,如图4中红色椭圆标注位置。maxima车辆目标车型与camry相似,零极化散射结构辨识结果与cameron分解结果的差异也主要存在于车身前侧位置。对于车辆目标sentra,两种散射结构辨识结果几乎相同,两者差异主要位于前后两侧车窗的位置,如图6所示,零极化散射结构辨识方法的结果对称性更强,并且其识别结果更加接近实际散射结构类型。相比于前三种小型轿车,mazdampv车辆目标尺寸更大,车身后侧与小轿车具有显著差异,从散射结构辨识结果来看,cameron分解结果中车身后侧主要为圆柱体和偶极子,而在零极化散射结构辨识中,两侧对称位置的偶极子被识别为窄二面角结构。在车身前侧,cameron分解中与二面角结构对应位置出现了螺旋散射结构,在零极化散射结构辨识中正确识别为二面角结构。综上,零极化散射结构辨识方法能够准确识别车辆目标中大部分散射中心的散射结构,并且相对于cameron分解,识别结果具有更强的对称性,更符合散射中心的实际散射类型。
[0071]
图8为对比实验二中所用的电磁仿真数据的无人机模型和pauli图像。本实验采用了一个全金属无人机模型的电磁计算数据。无人机模型如图8(a)所示。电磁仿真的中心频率为10ghz,带宽为4ghz,仰角设置为0
°
,方位角为0
°
,即正对无人机机头方向入射。pauli合
成图如图8(b)所示。可以看到无人机的散射主要由一个个单独的强散射点组成。
[0072]
图9分别为上述无人机模型电磁仿真数据的的散射结构辨识结果。可以看到两种方法对机翼和机头的解译结果基本相似,机翼均为圆柱体散射结构,机头由圆柱体和窄二面角组成。两种方法的主要差异位于机身和机翼的连接处以及机翼下方的挂载,如图9(a)中红色椭圆标注的位置。从cameron分解结果中可以看到,机翼与机身的连接处有一个散射中心被解译成四分之一波器件,而在零极化散射结构辨识结果中解译为窄二面角,与右侧对称位置的散射中心散射机理相同,并且更接近机翼与机身连接处的实际散射类型。除上述位置之外,两种结果在尾翼处也存在差异。尾翼处主要由偶极子,窄二面角和圆柱体等结构组成,cameron分解中存在部分四分之一波器件等复杂散射机理,而零极化散射结构辨识结果中不存在复杂结构,且左右两侧对称性更强。零极化散射结构辨识的结果具有与cameron分解结果性能相当,主要散射结构均能够正确解译,并且在部分明显结构处具有显著优于cameron分解的性能。
[0073]
以上包含了本发明优选实施例的说明,这是为了详细说明本发明的技术特征,并不是想要将发明内容限制在实施例所描述的具体形式中,依据本发明内容主旨进行的其他修改和变型也受本专利保护。本发明内容的主旨是由权利要求书所界定,而非由实施例的具体描述所界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。