一种基于v2v通信车辆连续追尾预警方法及设备
技术领域
1.本发明涉及通信技术领域,特别涉及一种基于v2v通信车辆连续追尾预警方法及设备。
背景技术:
2.众所周知,随着道路交通基础设施的不断完善,道路上车辆的增多,车辆在高速驾驶或者路况复杂情况下驾驶时,驾驶员在视线受阻的情况下,无法得知车道邻车、远车紧急制动的情况,容易造成多车连续追尾的交通事故。
3.目前,车辆安装的驾驶辅助系统多使用雷达、摄像头等,只能获取前方、紧邻车辆的行驶状态,并不能感知前车的邻车、远车的行驶状态,有很大的空间局限性。
技术实现要素:
4.基于此,有必要设计一种能够获取远距离、多目标的车辆行驶状态,以感知前车的邻车、远车的行驶状态,降低车辆间追尾情况发生率的基于v2v通信车辆连续追尾预警方法及设备。
5.一种基于v2v通信车辆连续追尾预警方法,包括:
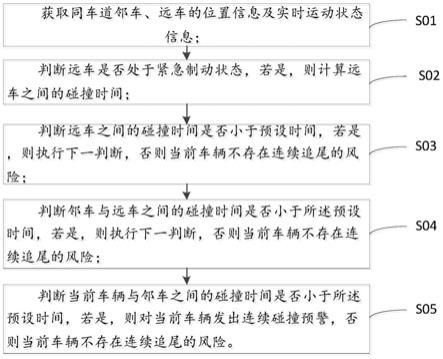
6.获取同车道邻车、远车的位置信息及实时运动状态信息;
7.判断远车是否处于紧急制动状态,若是,则计算远车之间的碰撞时间;
8.判断远车之间的碰撞时间是否小于预设时间,若是,则执行下一判断,否则当前车辆不存在连续追尾的风险;
9.判断邻车与远车之间的碰撞时间是否小于所述预设时间,若是,则执行下一判断,否则当前车辆不存在连续追尾的风险;
10.判断当前车辆与邻车之间的碰撞时间是否小于所述预设时间,若是,则对当前车辆发出连续碰撞预警,否则当前车辆不存在连续追尾的风险。
11.在其中一个实施例中,所述预设时间为2.5~3.5s之间的任一值。
12.在其中一个实施例中,所述获取同车道邻车、远车的位置信息,包括:通过所述当前车辆内的gnss定位模块得到周围车辆的位置信息,由所述当前车辆内的碰撞预警处理模块计算得到同车道邻车、远车的位置信息;
13.所述获取同车道邻车、远车的实时运动状态信息,包括:通过所述当前车辆内的v2v通信模块得到同车道邻车、远车的实时运动状态信息。
14.在其中一个实施例中,判断远车是否处于紧急制动状态包括如下步骤:
15.通过所述当前车辆内的v2v通信模块得到远车的制动信息;
16.判断所述远车是否有刹车信号,若是,则计算所述远车的制动加速度;
17.判断所述远车的制动加速度是否大于预设制动加速度,若是,则所述远车为紧急制动状态。
18.在其中一个实施例中,所述预设制动加速度为3.5m/s
2-4.0m/s2之间的任一值。
19.在其中一个实施例中,设定第一远车为rv2,第二远车为rv3,远车之间的碰撞时间为ttc
rv2-rv3
,远车之间的相对距离为s
rv2-rv3
,第二远车的制动距离为s
rv3
',第一远车的半车长为1/2l
rv2
,第二远车的半车长为1/2l
rv3
,第一远车的行车速度为v
rv2
,ttc
rv2-rv3
的计算公式如下:
20.ttc
rv2-rv3
=(s
rv2-rv3
s
rv3
'-1/2l
rv3-1/2l
rv2
)/v
rv2
。
21.在其中一个实施例中,设定邻车为rv1,邻车与远车之间的碰撞时间为ttc
rv1-rv2
,邻车与第一远车之间的相对距离为s
rv1-rv2
,第一远车的制动距离为s
rv2
',第一远车驾驶员的反应时间为t1',第一远车的制动加速度为a1,邻车的半车长为1/2l
rv1
,第一远车的半车长为1/2l
rv2
,邻车的行车速度为v
rv1
,ttc
rv1-rv2
的计算公式如下:
22.ttc
rv1-rv2
=(s
rv1-rv2
s
rv2
'-1/2l
rv2-1/2l
rv1
)/v
rv1
,其中,
23.s
rv2
'=v
rv2
*t1' v
rv22
/2v a1。
24.在其中一个实施例中,设定当前车辆为hv,当前车辆与邻车之间的碰撞时间为ttc
hv-rv1
,当前车辆与邻车之间的相对距离为s
hv-rv1
,邻车的制动距离为s
rv1
',邻车驾驶员的反应时间为t2',邻车的制动加速度为a2,当前车辆的半车长为1/2l
hv
,邻车的半车长为1/2l
rv1
,当前车辆的行车速度为v
hv
,ttc
hv-rv1
的计算公式如下:
25.ttc
hv-rv1
=(s
hv-rv1
s
rv1
'-1/2l
rv1-1/2l
hv
)/v
hv
,其中,
26.s
rv1
'=v
rv1
*t2' v
rv12
/2v a2。
27.在其中一个实施例中,所述远车之间的相对距离、所述邻车与第一远车之间的相对距离及所述当前车辆与邻车之间的相对距离均通过所述当前车辆内的gnss定位模块获取。
28.一种基于v2v通信车辆连续追尾预警设备,包括:
29.gnss定位模块,用于获取周围车辆的位置信息;
30.v2v通信模块,用于获取同车道邻车、远车的实时运动状态信息;
31.碰撞预警处理模块,用于计算得到同车道邻车、远车的位置信息,还用于做出碰撞预警判断并对当前车辆发出连续碰撞预警。
32.与现有技术相比,本发明具有如下有益技术效果:
33.本发明提出了一种基于v2v通信车辆连续追尾预警方法可帮助驾驶员提前评估邻车、远车的行驶状态,针对紧急制动的情况及时做出反应,即,通过v2v通信模块能够获取远距离、多目标的车辆行驶状态,以感知前车的邻车、远车的行驶状态,减少追尾情况的发生,提高通行效率和降低安全风险。
附图说明
34.图1为本发明一实施方式的一种基于v2v通信车辆连续追尾预警方法的步骤流程图。
35.图2为本发明的非紧邻车辆紧急制动的示意图。
36.图3为本发明一实施方式的一种基于v2v通信车辆连续追尾预警设备的模块图。
37.附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的;相同或相似的标号对应相同或相似
的部件;附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。
具体实施方式
38.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征更易被本领域技术人员理解,从而对本发明的保护范围作出更为清楚的界定。
39.请参阅图1,其为本发明一实施方式的一种基于v2v通信车辆连续追尾预警方法的步骤流程图。一种基于v2v通信车辆连续追尾预警方法,包括:
40.s01:获取同车道邻车、远车的位置信息及实时运动状态信息。
41.一实施例中,所述获取同车道邻车、远车的位置信息包括:通过所述当前车辆内的gnss定位模块得到周围车辆的位置信息,由所述当前车辆内的碰撞预警处理模块计算得到同车道邻车、远车的位置信息,即,通过gnss定位模块获取得到周围车辆的位置信息,由碰撞预警处理模块计算与当前车辆hv的相对位置关系,筛选出当前车辆同车道前方的邻车及一辆远车或多辆远车,如,图2所示的当前车辆hv(host vehicle)、邻车rv1(remote vehicle)、第一远车rv2、第二远车rv3,即rv1是hv同车道前面的第一辆车,rv2是hv同车道前面的第二辆车,rv3是hv同车道前面的第三辆车,gnss定位模块的精度能够达到厘米级。所述获取同车道邻车、远车的实时运动状态信息包括:通过所述当前车辆内的v2v通信模块得到同车道邻车、远车的实时运动状态信息,即,通过v2v通信模块获取当前车辆hv同车道前方的相关车辆rv1、rv2、rv3的行驶状态及制动信号等。v2v通信模块是一种不受限于固定式基站的通信技术,为移动中的车辆提供直接的一端到另一端的无线通信。即通过v2v通信模块,车辆终端彼此直接交换无线信息,无需通过基站转发。需要说明的是,请参阅图2,在交通拥挤路况时,当前车辆hv所在车道前方有远车rv1、rv2、rv3,当rv3突然紧急制动时,rv3在rv2的可视范围内,rv2能够及时刹车避免与rv3碰撞,但相对于hv,其前方视线受到rv1和rv2的阻碍,无法及时获取rv3紧急制动的消息,且由于rv1和rv2相继制动的反应时间延迟,hv来不及反应刹车,就会导致追尾。
42.s02:判断远车是否处于紧急制动状态,若是,则计算远车之间的碰撞时间。一实施例中,通过所述当前车辆内的v2v通信模块得到远车的制动信息;判断所述远车是否有刹车信号,若是,则计算所述远车的制动加速度;判断所述远车的制动加速度是否大于预设制动加速度,若是,则所述远车为紧急制动状态。又如,所述预设制动加速度为3.5m/s2-4.0m/s2之间的任一值,优选的,所述预设制动加速度的为4.0m/s2。需要说明的是,紧急制动预警算法很多,本发明主要突出多车情况的紧急制动预警。
43.s03:判断远车之间的碰撞时间是否小于预设时间,若是,则执行下一判断,否则当前车辆不存在连续追尾的风险。
44.一实施例中,设定第一远车为rv2,第二远车为rv3,远车之间的碰撞时间为ttc rv2-rv3,远车之间的相对距离为s rv2-rv3,第二远车的制动距离为s rv3',第一远车的半车长为1/2l rv2,第二远车的半车长为1/2l rv3,第一远车的行车速度为vrv2,ttc rv2-rv3的计算公式如下:ttc rv2-rv3=(s rv2-rv3 s rv3'-1/2l rv3-1/2l rv2)/vrv2,又如,所述预设时间为2.5~3.5s之间的任一值,优选的,所述预设时间为3s,若ttc rv2-rv3<3s,则认为rv2和rv3有碰撞风险,需要进一步计算rv1和rv2是否有碰撞风险;否则,对于hv不存在连续追尾的风险。
45.s04:判断邻车与远车之间的碰撞时间是否小于所述预设时间,若是,则执行下一判断,否则当前车辆不存在连续追尾的风险。
46.一实施例中,设定邻车为rv1,邻车与远车之间的碰撞时间为ttc rv1-rv2,邻车与第一远车之间的相对距离为s rv1-rv2,第一远车的制动距离为s rv2',第一远车驾驶员的反应时间为t1',第一远车的制动加速度为a1,邻车的半车长为1/2l rv1,第一远车的半车长为1/2l rv2,邻车的行车速度为vrv1,ttc rv1-rv2的计算公式如下:ttc rv1-rv2=(s rv1-rv2 s rv2'-1/2lrv2-1/2l rv1)/vrv1,其中,s rv2'=vrv2*t1' vrv22/2v a1。又如,rv2和rv3有碰撞风险,需要判断rv1和rv2是否有碰撞风险,此时需假设rv2在得知rv3紧急制动的情况下采取了减速措施,若ttc rv1-rv2<3s,rv1和rv2有碰撞风险,则需要进一步判断rv1和hv是否有碰撞风险,否则对于hv不存在追尾的碰撞风险。
47.s05:判断当前车辆与邻车之间的碰撞时间是否小于所述预设时间,若是,则对当前车辆发出连续碰撞预警,否则当前车辆不存在连续追尾的风险。
48.一实施例中,设定当前车辆为hv,当前车辆与邻车之间的碰撞时间为ttc hv-rv1,当前车辆与邻车之间的相对距离为shv-rv1,邻车的制动距离为srv1',邻车驾驶员的反应时间为t2',邻车的制动加速度为a2,当前车辆的半车长为1/2lhv,邻车的半车长为1/2l rv1,当前车辆的行车速度为vhv,ttc hv-rv1的计算公式如下:ttc hv-rv1=(shv-rv1 s rv1'-1/2l rv1-1/2l hv)/vhv,其中,s rv1'=vrv1*t2' vrv12/2v a2。若rv1和rv2有碰撞风险,rv1可能才需制动措施,需计算rv1和hv是否存在碰撞风险,若ttc hv-rv1<3s,则rv1和hv存在碰撞风险,即存在hv、rv1、rv2、rv3连续追尾的风险,需要对hv做出碰撞预警。
49.一实施例中,所述远车之间的相对距离、所述邻车与第一远车之间的相对距离及所述当前车辆与邻车之间的相对距离均通过所述当前车辆内的gnss定位模块获取。
50.请参阅图3,本发明还包括了一种基于v2v通信车辆连续追尾预警设备10包括:gnss定位模块100,用于获取周围车辆的位置信息;v2v通信模块200,用于获取同车道邻车、远车的实时运动状态信息;及碰撞预警处理模块300,用于计算得到同车道邻车、远车的位置信息,还用于做出碰撞预警判断并对当前车辆发出连续碰撞预警。
51.与现有技术相比,本发明具有如下有益技术效果:
52.本发明提出了一种基于v2v通信车辆连续追尾预警方法可帮助驾驶员提前评估邻车、远车的行驶状态,针对紧急制动的情况及时做出反应,即,通过v2v通信模块能够获取远距离、多目标的车辆行驶状态,以感知前车的邻车、远车的行驶状态,减少追尾情况的发生,提高通行效率和降低安全风险。
53.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。