1.本发明属于医疗器械技术领域,具体涉及为一种腹腔镜下样本组织取出装置。
背景技术:
2.腹腔镜手术作为一门新发展起来的微创方法,是未来手术方法发展的一个必然趋势;与传统手术相比,因其术后瘢痕小、且符合美学要求,使其深受患者的欢迎。目前,大部分普通外科的手术,腹腔镜手术都能完成。如阑尾切除术,胃、十二指肠溃疡穿孔修补术、疝气修补术、结肠切除术、脾切除术、肾上腺切除术,还有卵巢囊肿摘除、宫外孕、子宫切除、子宫肌瘤切除等,随着腹腔镜技术的日益完善和腹腔镜医生操作水平的提高,几乎所有的外科手术都能采用这种手术。
3.目前针对腹腔镜下体内病理组织的取样,多使用前端为锯齿状的活检钳,在闭合时易发生滑动,且通过钳体的挫动来取得小片组织,在取出体外的过程中易发生脱落,增加了医务人员的劳动量,而且如果切剪或挫取不到位,取样样本会出现小部分与病灶连接,造成牵拉出血,同时会破坏组织的完整性。
4.因此需要一种能够将取样组织进行完整的切除取出,同时能够防止在将取样组织取出体外时脱落的器械,本发明针对上述问题,提供一种腹腔镜下样本组织取出装置。
技术实现要素:
5.为了克服背景技术中提出的问题,本发明提供一种腹腔镜下样本组织取出装置。
6.一种腹腔镜下样本组织取出装置,其包括用于穿刺的外套管,操作手柄,对病灶处进行分离取出的取样结构,牵拉结构,所述操作手柄上设置外套管,操作手柄设置有内腔,取样结构设置在内腔中,并通过内腔设置的贯穿孔伸出到外套管内,取样结构通过牵拉结构在外套管内进行探出与收回,所述牵拉结构分别与取样结构和操作手柄连接;取样结构包括前端的多个取样爪及与牵拉结构连接的转芯;转芯不同方向转动实现取样爪的张合动作。
7.进一步,所述操作手柄包括操作体和手柄,操作体向人体端设置与外套管直径相同的连接孔,连接孔与操作体所设置的内腔并不相通,并且在操作体内部设置供取样结构伸入至内腔中的贯穿孔。
8.进一步,所述外套管进入人体端为尖锐端,具有穿刺的功能。
9.进一步,取样结构包括用于固定取样爪的爪盘,设置在爪盘上的取样爪,与爪盘固定连接的内套管;取样爪上设置与转芯接触的结构。
10.进一步,所述转芯第一端设置为涡杆,且涡杆并未与端点重合,所述爪盘上设置与转芯连接并辅助转芯转动的轴承,内套管与爪盘固定连接,保证在转芯转动时爪盘不会发生转动。
11.进一步,所述爪盘设置固定取样爪的固定轴一,取样爪以爪盘为圆心阵列设置在爪盘上,并通过固定轴一进行固定,取样爪上设置与转芯所设置的涡杆相匹配的扇形涡轮。
12.进一步,所述取样爪阵列设置数量为3~5个,且外切圆直径不会超过外套管内径,此设置保证爪盘带动取样爪能够在外套管内进行伸出与回缩。
13.进一步,所述取样爪上设置用于防止切取后的病理组织脱落的保护板,并设置用于取样的切割尖端,各取样爪的切割尖端接触后,各取样爪上设置的保护板形成保护空间,以此设置来防止切取后的病理组织脱落问题。
14.进一步,所述取样结构两端点的长度大于外套管的长度,并通过牵拉结构使爪盘完全脱离外套管,此设置保证取样爪的张开不会受到外套管的制约。
15.进一步,所述操作体第一端另外设置对内调管进行限位的限位槽一,内套管与限位槽一连接端设置限位滑块一,内套管与转芯作相应的前移和后退动作,且内套管不会进行旋转。
16.进一步,所述牵拉结构包括:与手柄连接的连杆一,与连接杆一活动连接的连接杆二,此设置通过连杆一和连杆二之间的联动将取样结构推出。
17.进一步,所述手柄设置连接腔,并在连接腔内设置固定轴二,连杆一通过固定轴二进行连接,连杆一长度大于连杆二的长度。
18.进一步,所述操作体的内腔中设置滑动块,滑动块后端连接连杆二;通过连杆一和连杆二之间的联动将滑动块推出。
19.进一步,滑动内设置转芯延长段,并设置辅助转芯转动的圆柱轴,转芯延长段设置转动手柄;且滑动块与转芯不发生相对位置移动只发生相对转动。
20.进一步,所述操作体内腔设置限位槽二,并在滑动块两侧设置限位滑块二,此设置保证在转动转芯时,滑动块不会发生转动。
21.或者,滑动块内设置一减速电机,减速电机带动转芯转动,且通过牵拉结构将滑动块前推,并在在手柄底部设置供电接口。
22.进一步,所述操作体上设置中央控制模块,并在手柄上设置电机的操控按钮。
23.使用时,通过供电接口为器械进行供电,先使用具有穿刺功能的外套管,刺入患者体内,到达病灶处上方后,按压牵拉结构,通过连杆一和连杆二将取样结构前端的爪盘完全推出至外套管外,启动电机并使控制电机正转,使取样爪张开,靠近病灶,按电机反转按钮,取样爪对病灶处进行取样,取样完成后,各个取样爪尖端相接触,形成保护空间,防止样本的脱落,在通过将连杆一向后牵拉,将取样结构收回至外套管内,完成体内病灶处的取样。
24.本发明的有益效果:(1)、通过设置具有穿刺功能的外套管减少了穿刺和取样器械进入患者体内的次数,减轻了患者的治疗过程中的痛苦;(2)、通过设置取样结构,实现将病灶处的样本进行完整的取样,且不会出现取样不彻底,在取出时造成牵拉出血,同时,取样结构可以再取样后自动形成保护样本的空间,避免了取出时样本掉落问题。
附图说明
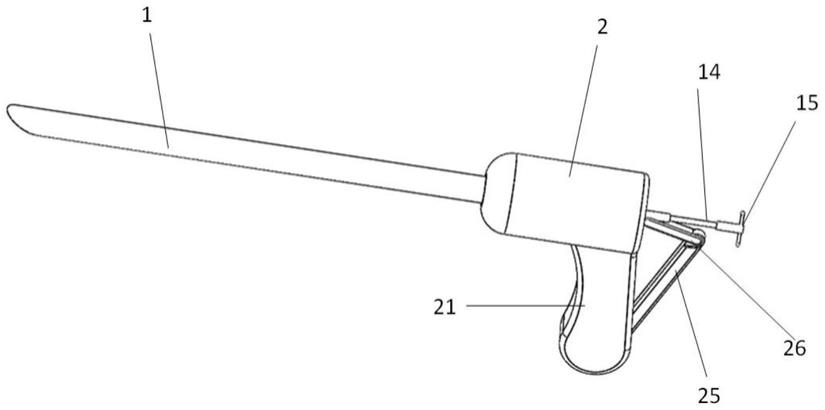
25.图1为本发明整体结构示意图;
26.图2为本发明取样爪伸出后示意图;
27.图3为本发明操作体剖视示意图;
28.图4为本发明整体结构剖视示意图;
29.图5为本发明爪盘示意图;
30.图6为本发明取样爪示意图;
31.图7为本发明取样爪右上视角示意图;
32.图8为本发明电动驱动示意图;
33.图9为本发明电动驱动取样爪伸出后示意图;
34.图10为本发明操作体上表面剖视示意图;
35.图11为本发明操作体前视示意图;
36.图12为本发明电机驱动示意图;
37.图中,1、外套管;11、内套管;12、爪盘;121、涡杆;122、轴承;13、取样爪;131、保护板;14、转芯;15、转动手柄;2、操作体;21、手柄;22、内腔;23、滑动块;24、限位槽二;25、连杆一;26、连杆二;27、连接腔;3、减速电机;31、供电接口;32、中央控制模块;33、操控按钮。
具体实施方式
38.以下通过特定的具体实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.实施例1
40.一种腹腔镜下样本组织取出装置,其包括用于穿刺的外套管1,操作手柄21,对病灶处进行分离取出的取样结构,牵拉结构,所述操作手柄21上设置外套管1,操作手柄21设置有内腔22,取样结构设置在内腔22中,并通过内腔22设置的贯穿孔伸出到外套管1内,取样结构通过牵拉结构在外套管1内进行探出与收回,所述牵拉结构分别与取样结构和操作手柄21连接;取样结构包括前端的多个取样爪13及与牵拉结构连接的转芯14;转芯14不同方向转动实现取样爪13的张合动作。
41.实施例2
42.参考图1—图4及图10,在实施例1的基础上对操作手柄21进行设置,操作手柄21包括操作体2和手柄21,操作体2向人体端设置与外套管1直径相同的连接孔,连接孔与操作体2所设置的内腔22并不相通,并且在操作体2内部设置供取样结构伸入至内腔22中的贯穿孔。
43.实施例3
44.参考图5—图7在实施例2的基础上对取样结构进行设置,外套管1进入人体端为尖锐端,具有穿刺的功能。
45.取样结构包括用于固定取样爪13的爪盘12,设置在爪盘12上的取样爪13,与爪盘12固定连接的内套管11;取样爪13上设置与转芯14接触的结构。
46.转芯14第一端设置为涡杆121,且涡杆121并未与端点重合,所述爪盘12上设置与转芯14连接并辅助转芯14转动的轴承122,内套管11与爪盘12固定连接,保证在转芯14转动时爪盘12不会发生转动。
47.爪盘12设置固定取样爪13的固定轴一,取样爪13以爪盘12为圆心阵列设置在爪盘
12上,并通过固定轴一进行固定,取样爪13上设置与转芯14所设置的涡杆121相匹配的扇形涡轮。
48.取样爪13阵列设置数量为3~5个,且外切圆直径不会超过外套管1内径,此设置保证爪盘12带动取样爪13能够在外套管1内进行伸出与回缩。
49.取样爪13上设置用于防止切取后的病理组织脱落的保护板131,并设置用于取样的切割尖端,各取样爪13的切割尖端接触后,各取样爪13上设置的保护板131形成保护空间,以此设置来防止切取后的病理组织脱落问题。
50.取样结构两端点的长度大于外套管1的长度,并通过牵拉结构使爪盘12完全脱离外套管1,此设置保证取样爪13的张开不会受到外套管1的制约。
51.操作体2第一端另外设置对内调管进行限位的限位槽一,内套管11与限位槽一连接端设置限位滑块一,内套管11与转芯14作相应的前移和后退动作,且内套管11不会进行旋转。
52.实施例4
53.参考图1—图3,在实施例3的基础上对牵拉结构进行设置,牵拉结构包括:与手柄21连接的连杆一25,与连接杆一活动连接的连接杆二,此设置通过连杆一25和连杆二26之间的联动将取样结构推出。
54.手柄21设置连接腔27,并在连接腔27内设置固定轴二,连杆一25通过固定轴二进行连接,连杆一25长度大于连杆二26的长度。
55.操作体2的内腔22中设置滑动块23,滑动块23后端连接连杆二26;通过连杆一25和连杆二26之间的联动将滑动块23推出。
56.滑动内设置转芯14延长段,并设置辅助转芯14转动的圆柱轴,转芯14延长段设置转动手柄15;且滑动块23与转芯14不发生相对位置移动只发生相对转动。
57.操作体2内腔22设置限位槽二24,并在滑动块23两侧设置限位滑块二,此设置保证在转动转芯14时,滑动块23不会发生转动。
58.实施例5
59.参考图8—图12,在实施例1的基础上对取样结构使用电机驱动设置,滑动块23内设置一减速电机3,减速电机3带动转芯14转动,并在在手柄21底部设置供电接口31。
60.操作体2上设置中央控制模块32,并在手柄21上设置电机的操控按钮33。
61.上述实施例的说明只是用于理解本发明。应当指出,对于本领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进,这些改进也将落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。