1.本发明涉及一种收获机械装置及其控制方法,尤其涉及一种浆果收获机械装置及其控制方法。
背景技术:
2.在浆果的种植生产中,手工采摘作业是浆果生产中最耗时、最费力的一个环节。其中浆果果实小、产量高等特点,使得采摘收获成为一项劳动密集型工作,费时耗力。在人力成本越来越高的今天,浆果生产收获效益与人工成本密切相关,开发一套适合我国浆果收获作业机械,对农业发展有着重要意义。
技术实现要素:
3.发明目的:本发明目的是提供一种浆果收获机械装置及其控制方法,以提高收获效率。
4.技术方案:本发明包括机械本体,所述机械本体底部安装有行走装置,机械本体顶部安装有收获装置,机械本体底部安装有多个检测装置,所述的检测装置与控制系统连接,所述的收获装置内设有多个振动器,所述的振动器末端安装有振动杆,收获装置底部安装有收集袋。
5.所述的收获装置通过伸缩装置与机械本体连接。
6.所述的机械本体内安装有电源装置。
7.所述的检测装置为传感检测装置,通过检测地面定位点,确定机械本体停车位置。
8.所述的控制系统为控制平台或远程控制器,远程控制状态下,根据设定距离数据,控制行走装置行进距离,当达到设定数据时,行走装置停止前进并返回。
9.所述的控制平台安装在机械本体内。
10.所述的收获装置采用电动可张合收获装置,收获装置包括收获框,所述收获框的两端设有合页,合页上安装有电机。
11.一种浆果收获机械装置的控制方法,包括以下步骤:
12.(1)启动装置,机械本体匀速向前行走;
13.(2)安装在机械本体底部的传感检测装置通过检测地面定位点,有效检测信号用以确定行走装置停车位置以及电动可张合收获装置动作;
14.(3)若传感检测装置未检测到有效信号,行走装置继续匀速向前行走;当检测到有效信号时,行走装置减速停车,并控制电动可张合收获装置动作,收获装置在设定时间内完成相关收获机械动作后,收获装置恢复到初始静止未收获状态,行走装置取消停车,并继续向前运行。
15.所述步骤(3)具体包括以下步骤:
16.(31)传感检测装置在未检测到地面有效信号时,行走装置匀速向前行走,收获装置处于静止非工作状态,折放置于机械本体上;
17.(32)传感检测装置在检测到地面有效信号时,行走装置减速停车,收获装置通过电动伸缩杆和相关铰链,从机械本体处向上折翻,并向浆果树靠近,电机控制电动收获框张开并靠近浆果树,再通过电机合拢收获框,将浆果树收拢在收获框内;
18.(33)通过设置拍打频率和时间,控制收获框内振动杆拍打浆果树枝;
19.(34)振动杆拍打浆果树枝,将浆果从树枝上拍落,落入下端的收集袋里,当按照设定时间完成相关收获机械动作后,电机张开收获框,通过电动伸缩杆使收获框离开浆果树,并折放置于机械本体上,使收获装置恢复到初始静止未收获状态。
20.有益效果:本发明控制平台设计界面友好,收获机械相关数据状态实时显示,并可远程控制,远程控制时,设定距离数据,当行走装置行走数据达到设定数据时,行走装置停止前进并返回,有助于解放劳动力,提高生产效率,带动相关产业的发展,创造更多的就业机会,增加农民收入。
附图说明
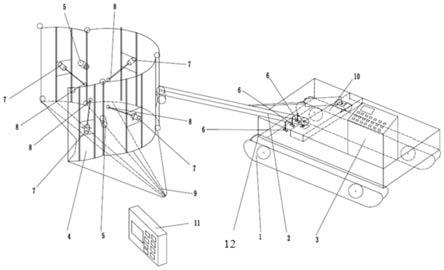
21.图1是本发明的整体结构示意图;
22.图2为本发明的控制流程图。
具体实施方式
23.下面结合附图对本发明作进一步说明。
24.如图1所示,本发明包括机械本体12、行走装置1、伸缩装置、控制系统、收获装置4、传感检测装置6,机械本体12底部安装有行走装置1,机械本体12顶部安装有收获装置4,机械本体12底部安装有多个传感检测装置6,传感检测装置6与控制系统连接。控制系统采用控制平台3或远程控制器11,控制平台3安装在机械本体12上,通过控制平台3或远程控制器11启动本发明的装置。收获装置4采用电动可张合收获装置,通过伸缩装置安装在机械本体12顶部,伸缩装置包括电动伸缩杆2,当传感检测装置6采集到有效信号时,行走装置1减速停车,收获装置4通过电动伸缩杆2从机械本体12处向上、前折翻,并向浆果树靠近。
25.收获装置4包括收获框,收获框两端安装有合页,合页上安装有电机5,通过电机5控制收获框张合,将浆果树收拢在收获框内。收获框上间隔设有多个振动器7,振动器7末端安装有振动杆8,收获框底部安装有收集袋9,用于收集浆果。通过设置拍打频率和时间,控制收获框内的振动杆8拍打浆果树枝,浆果从树枝上拍落,落入下端的收集袋9里。当按照设定时间完成相关收获机械动作后,电机5张开收获框,电动伸缩杆使收获框离开浆果树,并折放置于机械本体12上,使收获装置4恢复到初始静止未收获状态。
26.传感检测装置6包括多个传感器,通过检测地面定位点,用以确定机械本体12停车位置以及电动可张合收获装置动作,在未检测到地面有效检测信号时,行走装置1根据设置速度匀速向前运动,收获装置4处于静止非工作状态,折放置于机械本体12上;当传感检测装置6采集到有效信号时,行走装置1减速停车,控制电动可张合收获装置向浆果树靠近,电机5使电动收获框张开并收拢浆果树,可调频振动杆8拍打浆果树枝,实现将浆果从树枝上拍落,落入下端收集袋9里。
27.收获装置4在设定时间内完成相关收获机械动作后,收获装置4恢复到初始静止未收获状态;行走装置1取消停车,并继续向前运行,当传感检测装置6再次采集到有效信号
时,行走装置1再次减速停车,控制电动可张合收获装置4向浆果树靠近,电机5使电动收获框张开并收拢浆果树,可调频振动杆拍打浆果树枝,实现将浆果从树枝上拍落,落入下端收集袋里。远程控制时,设定距离数据,当行走装置行走数据达到设定数据时,行走装置1停止前进并返回。
28.本发明的控制方法包括以下步骤:
29.(1)控制平台或远程控制器启动装置,机械本体匀速向前行走;
30.(2)安装在机械本体底部的传感检测装置通过检测地面定位点,有效检测信号用以确定机械本体停车位置以及电动可张合收获装置动作;
31.(3)当安装在底部的传感器检测装置未检测到有效信号时,行走装置继续匀速向前行走;当检测到有效信号时,行走装置减速停车,并控制电动可张合收获装置动作,收获装置在设定时间内完成相关收获机械动作后,收获装置恢复到初始静止未收获状态;行走装置取消停车,并继续向前运行。远程控制时,设定距离数据,当行走装置行走数据达到设定数据时,行走装置停止前进并返回,具体包括以下步骤:
32.(31)传感检测装置在未检测到地面有效检测信号时,行走装置匀速向前行走,收获装置处于静止非工作状态,折放置于机械本体上;
33.(32)传感检测装置在检测到有效信号时,行走装置减速停车,收获装置通过电动伸缩杆和相关铰链,从机械本体处向上、前折翻,并向浆果树靠近,电机控制电动收获框张开并靠近浆果树,再通过张合电机合拢收获框,将浆果树收拢在收获框内;
34.(33)通过设置拍打频率和时间,控制收获框内振动杆拍打浆果树枝;
35.(34)振动杆拍打浆果树枝,浆果从树枝上拍落,落入下端的收集袋里,当按照设定时间完成相关收获机械动作后,张合电机张开收获框,通过电动伸缩杆使收获框离开浆果树,并折放置于机械本体上,使收获装置恢复到初始静止未收获状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。