技术特征:
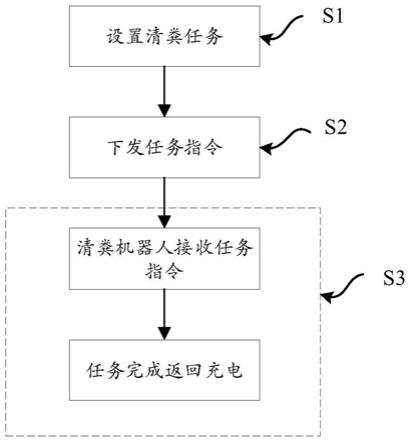
1.一种用于清粪机器人的自主导航方法,其特征在于,包括:接收清粪任务指令,所述清粪任务指令指示了需要进行清粪的一个或多个板下单元;根据所述清粪任务指令制定任务路线;按照所述任务路线行进,并在行进过程中确定是否到达一个板下单元入口处;在所述板下单元入口处,加载对应的板下单元的地图,进入板下单元的内部以执行相应的清粪操作;其中,所述地图为基于激光雷达点云数据构建的地图,每个板下单元对应一个地图。2.根据权利要求1所述的方法,其特征在于,在按照所述任务路线行进过程中,根据姿态传感器反馈的信息,判断是否经过下粪口斜坡;响应于经过下粪口斜坡,加载首部板下单元的地图;其中,所述首部板下单元为下粪口斜坡所在的板下单元。3.根据权利要求2所述的方法,其特征在于,在经过所述下粪口斜坡后,根据姿态传感器反馈的信息,判断是否经过首部板下单元与中部板下单元之间通道、或者两个中部板下单元之间的通道;响应于经过首部板下单元与中部板下单元之间通道、或者两个中部板下单元之间的通道,加载所到达的中间板下单元的地图;其中,所述中部板下单元为首部板下单元以外的板下单元。4.根据权利要求3所述的方法,其特征在于,在板下单元入口处设置初始点,以校正清粪机器人的初始位置。5.根据权利要求4所述的方法,其特征在于,在初始点附近设置引导点;响应于达到所述引导点,进入板下单元的内部。6.根据权利要求5所述的方法,其特征在于,所述引导点由人工在地图中预设。7.根据权利要求5所述的方法,其特征在于,所述引导点由清粪机器人根据初始点和定位信息确定。8.根据权利要求1
‑
7任一项所述的方法,其特征在于,所述进入板下单元的内部执行清粪操作包括:根据板下单元的内部的排粪口位置,规划清粪路径,按照所述清粪路径将粪便推进所述排粪口中。9.一种用于清粪机器人的自主导航装置,其特征在于,处理器、存储器、通信接口和通信总线,所述处理器、存储器和通信接口通过通信总线完成相互间的通信,所述处理器用于执行如权利要求1至8中任一项所述的方法。10.一种计算机存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的方法。
技术总结
本发明涉及一种用于清粪机器人的自主导航方法、装置和计算机存储介质,所述方法包括:接收清粪任务指令,所述清粪任务指令指示了需要进行清粪的一个或多个板下单元;根据所述清粪任务指令制定任务路线;按照所述任务路线行进,并在行进过程中确定是否到达一个板下单元入口处在所述板下单元入口处,加载对应的板下单元的地图,进入板下单元的内部以执行相应的清粪操作;其中,所述地图为基于激光雷达点云数据构建的地图,每个板下单元对应一个地图。本发明能够实现自动导航和清粪,从而避免了工作人员进入板下恶劣的环境中作业,同时提高了板下清粪的效率。板下清粪的效率。板下清粪的效率。
技术研发人员:张玉良 李选聪 周祖鸿 凌程祥
受保护的技术使用者:河南牧原智能科技有限公司
技术研发日:2021.08.16
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。