1.本实用新型涉及电力测量技术领域,特别涉及一种无人驾驶自动断油控制系统。
背景技术:
2.近年来,随着无人驾驶技术的不断发展,人们对无人驾驶车辆的要求越来越高。无人驾驶车辆的动力类型分为汽油、柴油和电动三种。其中,汽油动力与柴油动力是传统的动力类型,也是市面上占有率较大的动力类型。然而,使用汽油动力或柴油动力的车辆在行驶过程中都存在较小概率会发生发动机“飞车”现象,即发动机超速运转并不受控制。出现这种现象时,车辆就容易造成重大的安全事故。尤其是在无人驾驶的情况下,相比于人工驾驶缺乏驾驶员的临时反应和补救措施,存在一定的安全事故隐患。因此,无人驾驶车辆发生发动机失控等意外现象需要有相应的保障措施,以减小其出现安全事故的概率,降低无人驾驶车辆的行车风险。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种无人驾驶自动断油控制系统,为无人驾驶车辆提供保障措施,减小其出现安全事故的概率。
4.为了解决上述技术问题,本实用新型采用的技术方案为:
5.一种无人驾驶自动断油控制系统,包括控制模块、液用电磁阀以及用于与车身控制器通信的通信模块;
6.所述控制模块分别与所述液用电磁阀的阀门控制端和所述通信模块相连,所述液用电磁阀用于连通车辆的发动机供油管和油箱。
7.进一步地,所述控制模块包括控制器和电磁阀驱动电路;
8.所述控制器分别与所述通信模块和所述电磁阀驱动电路的驱动信号输入端相连,所述电磁阀驱动电路的信号输出端与所述液用电磁阀的阀门控制端相连。
9.进一步地,所述控制器为m3处理器。
10.进一步地,还包括第一接口;
11.所述电磁阀驱动电路的信号输出端通过所述第一接口与所述液用电磁阀的阀门控制端相连。
12.进一步地,所述通信模块与车身控制器的通信方式为控制器局域网络通信。
13.进一步地,还包括第二接口,所述通信模块通过所述第二接口与车身控制器通信连接。
14.进一步地,所述电磁阀驱动电路包括第一电阻、第一电容、第二电阻、三极管、二极管、继电器、外部电源和控制电源;
15.所述第一电阻的一端与所述控制器相连,所述第一电阻的另一端同时与所述第一电容的一端、所述第二电阻的一端和所述三极管的基极相连,所述三极管的集电极同时与所述二极管的正极和所述继电器的第一线圈引脚相连,所述二极管的负极同时与所述外部
电源和所述继电器的第二线圈引脚相连,所述继电器的公共触点引脚与所述控制电源相连,所述继电器的常开触点引脚与所述液用电磁阀相连;
16.所述第二电阻的另一端、所述第一电容的另一端和所述三极管的发射极均接地。
17.综上所述,本实用新型的有益效果在于:提供一种无人驾驶自动断油控制系统,在原车辆上连接油箱的发动机供油管上加装了液用电磁阀,并由控制模块进行控制。在车辆无人驾驶过程中,操作人员可依据行车数据判断车辆是否发生失控等异常并通过远程控制平台下达断油指令至车身控制器,并由车身控制器转发至控制模块。控制模块相应地控制液用电磁阀关闭,断开车辆发动机的供油来源,使得车辆因供油不足而熄火停车,减小其出现安全事故的概率,保障无人驾驶行车安全。
附图说明
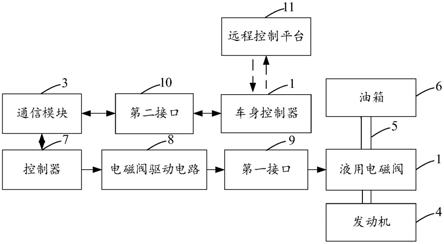
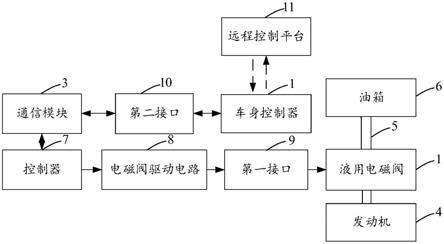
18.图1为本实用新型实施例的一种无人驾驶自动断油控制系统的系统框图;
19.图2为本实用新型实施例的一种无人驾驶自动断油控制系统的电磁阀驱动电路的电路连接示意图。
20.标号说明:
21.1、液用电磁阀;2、车身控制器;3、通信模块;4、发动机;5、发动机供油管;6、油箱;7、控制器;8、电磁阀驱动电路;9、第一接口;10、第二接口;11、远程控制平台;
22.c1、第一电容;
23.d1、二极管;
24.j1、继电器;
25.q1、三极管;
26.r1、第一电阻;r2、第二电阻;
27.vcc、外部电源;v1、控制电源。
具体实施方式
28.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
29.请参照图1和图2,一种无人驾驶自动断油控制系统,包括控制模块、液用电磁阀1以及用于与车身控制器2通信的通信模块3;
30.所述控制模块分别与所述液用电磁阀1的阀门控制端和所述通信模块3相连,所述液用电磁阀1用于连通车辆的发动机供油管5和油箱6。
31.从上述描述可知,本实用新型的有益效果在于:提供一种无人驾驶自动断油控制系统,在原车辆上连接油箱6的发动机供油管5上加装了液用电磁阀1,并由控制模块进行控制。在车辆无人驾驶过程中,操作人员可依据行车数据判断车辆是否发生失控等异常并通过远程控制平台11下达断油指令至车身控制器 2,并由车身控制器2转发至控制模块。控制模块相应地控制液用电磁阀1关闭,断开车辆发动机4的供油来源,使得车辆因供油不足而熄火停车,减小其出现安全事故的概率,保障无人驾驶行车安全。
32.进一步地,所述控制模块包括控制器7和电磁阀驱动电路8;
33.所述控制器7分别与所述通信模块3和所述电磁阀驱动电路8的驱动信号输入端相
连,所述电磁阀驱动电路8的信号输出端与所述液用电磁阀1的阀门控制端相连。
34.从上述描述可知,控制模块中对应为液用电磁阀1配设了电磁阀驱动电路8,并由控制器7来进行驱动控制,实现自动化控制油箱6的断油和供油。
35.进一步地,所述控制器7为m3处理器。
36.从上述描述可知,控制器7采用32为的m3处理器内核,其功耗低,性能优良。
37.进一步地,还包括第一接口9;
38.所述电磁阀驱动电路8的信号输出端通过所述第一接口9与所述液用电磁阀1的阀门控制端相连。
39.从上述描述可知,电磁阀驱动电路8与液用电磁阀1之间才有接口设计连接,结构简单,拆装方便。
40.进一步地,所述通信模块3与车身控制器2的通信方式为控制器7局域网络通信。
41.从上述描述可知,控制模块接入到车身控制器2上的整车控制器7局域网络之中,与车身控制器2进行数据交互,进而便于远程控制平台11对其进行控制。
42.进一步地,还包括第二接口10,所述通信模块3通过所述第二接口10与车身控制器2通信连接。通信模块3与车身控制器2通过控制器7局域网络通信。
43.从上述描述可知,通信模块3和车身控制器2之间也是采用接口设计。使用时,车身控制器2上的控制器7局域网络总线上引出一条分支接入到第二接口10上即可,接线简单方便。
44.进一步地,所述电磁阀驱动电路8包括第一电阻r1、第一电容c1、第二电阻r2、三极管q1、二极管d1、继电器j1、外部电源vcc和控制电源v1;
45.所述第一电阻r1的一端与所述控制器7相连,所述第一电阻r1的另一端同时与所述第一电容c1的一端、所述第二电阻r2的一端和所述三极管q1的基极相连,所述三极管q1的集电极同时与所述二极管d1的正极和所述继电器 j1的第一线圈引脚相连,所述二极管d1的负极同时与所述外部电源vcc和所述继电器j1的第二线圈引脚相连,所述继电器j1的公共触点引脚与所述控制电源v1相连,所述继电器j1的常开触点引脚与所述液用电磁阀1相连;
46.所述第二电阻r2的另一端、所述第一电容c1的另一端和所述三极管q1 的发射极均接地。
47.从上述描述可知,上述为电磁阀驱动电路8的具体电路连接关系,通过三极管q1组成的开关电路控制继电器j1通断,从而完成对液用电磁阀1的自动化控制。
48.请参照图1,本实用新型的实施例一为:
49.一种无人驾驶自动断油控制系统,如图1所示,包括控制模块、液用电磁阀1、通信模块3、第一接口9和第二接口10。控制模块包括控制器7和电磁阀驱动电路8。其中,控制器7分别与通信模块3和电磁阀驱动电路8的驱动信号输入端相连,电磁阀驱动电路8的信号输出端与液用电磁阀1的阀门控制端相连。液用电磁阀1用于连通车辆的发动机供油管5和油箱6。控制器7使用的是 m3处理器。在其他等他实施例中,控制器7也可以是其他系列的数据处理器。电磁阀驱动电路8的信号输出端通过第一接口9与液用电磁阀1的阀门控制端相连。通信模块3通过第二接口10与车身控制器2通信连接。优选地,液用电磁阀1可以是常闭型dn8高压电磁阀。控制器7可选用stm32f103单片机。
50.本实施例的一个具体断油过程为:
51.无人驾驶车辆行驶过程中,操控人员可借助行车数据来判断车辆是否发生失控。在认为车辆发生失控后,操控人员在远程控制平台11下达断油指令至车身控制器2上,并由车身控制器2转发至控制器7上。控制模块在接到指令后,驱动电磁阀驱动电路8使液用电磁阀1关闭。由于液用电磁阀1关闭,油箱6 的油就无法通过供油管运输至发动机4内。这样一来,发动机4很快就会因为供油不足而无法转动;车辆就会自动熄火停车,以此有效地降低车辆因失控而造成安全事故的风险。并且,只要液用电磁阀1未打开,控制器7断电也依旧不会使得车辆发动机4的供油恢复。
52.此外,本实施例的一个安装过程为:
53.首先,在原车辆的油箱6和发动机4的之间的供油管上接入一个液用电磁阀1,使得供油管内的油必须穿过液用电磁阀1上的通路才能够进入发动机4;然后,将液用电磁阀1的阀门控制端接入第一接口9上,使得液用电磁阀1的阀门控制端与电磁阀驱动电路8相连通,形成控制回路;最后,将车身控制器2 的控制器7局域网络通信总线引出分支接入第二接口10之中,使得控制模块接入到整车的控制器7局域网络之中。到此,无人驾驶自动断油控制系统便安装完成,其接线简单,无需变动原车辆上的设备,适用于一般的车辆进行断油控制改装。
54.在本实施例中,如图2所示,电磁阀驱动电路8包括第一电阻r1、第一电容c1、第二电阻r2、三极管q1、二极管d1、继电器j1、外部电源vcc和控制电源v1。其中,第一电阻r1的一端与控制器7相连,第一电阻r1的另一端同时与第一电容c1的一端、第二电阻r2的一端和三极管q1的基极相连,三极管q1的集电极同时与二极管d1的正极和继电器j1的第一线圈引脚相连,二极管d1的负极同时与外部电源vcc和继电器j1的第二线圈引脚相连,继电器 j1的公共触点引脚与控制电源v1相连,继电器j1的常开触点引脚与液用电磁阀1相连;第二电阻r2的另一端、第一电容c1的另一端和三极管q1的发射极均接地。
55.应当知晓的是,本实施例和以下实施例的改进主要在于对车辆的发动机4 和油箱6之间加入了包括液用电磁阀1在内的控制系统,至于远程控制平台11 下达指令、控制模块驱动控制液用电磁阀1的方法,通过现有的计算方法和编程设计即可实现,在本实施例不进行赘述。
56.综上所述,本实用新型公开了一种提供一种无人驾驶自动断油控制系统,在原车辆上连接油箱的发动机供油管上加装了液用电磁阀,并由控制模块进行控制。在车辆无人驾驶过程中,操作人员可依据行车数据判断车辆是否发生失控等异常并通过远程控制平台下达断油指令至车身控制器,并由车身控制器转发至控制模块。控制模块相应地控制液用电磁阀关闭,断开车辆发动机的供油来源,使得车辆因供油不足而熄火停车,减小其出现安全事故的概率,保障无人驾驶行车安全。
57.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。