1.本实用新型涉及一种自动检测设备,具体是路灯照度自动检测机器人。
背景技术:
2.路灯作为城市道路重要的附属设施,是城市公共设施的重要组成部分,为人民夜间出行,改善城市人居环境发挥着重要作用。在路灯建设、维护管理工作中对其路面照度、照度均匀度、亮度等都有着明确的规定,现阶段为了检测路灯的照度、亮度都需要工作人员手持设备到路面上进行检测,这种方法工作量大,使用人员数量多,测试结果误差大,同时还存在存在一定的危险性问题。
技术实现要素:
3.针对上述现有技术存在的问题,本实用新型提供路灯照度自动检测机器人,可以自动对路灯的路面照度进行检测和计算,降低工作强度,提升工作效率,降低检测误差。
4.为了实现上述目的,本实用新型路灯照度自动检测机器人,包括自动检测机器人主机盒、照度检测探头安装基台、检测探头模组、路灯观测摄像头、路面观测摄像头、雷达模组、遮光天线板、警示灯、辅助警示灯和自动检测机器人行走部件,所述的自动检测机器人主机盒上部设有照度检测探头安装基台,照度检测探头安装基台上部设有检测探头模组,可以对路灯路面照度进行检测,检测探头模组四周的照度检测探头安装基台上部设有两个以上的路灯观测摄像头,路灯观测摄像头用于让检测探头模组,能够在自动检测机器人行走部件和自动检测机器人驱动轮组的配合下处于路灯下最佳的检测位置,并且观测灯具现状,照度检测探头安装基台前部边缘设有两个雷达模组,用于检测前方路面状态自动避障的同时采集路面宽度灯距长度的信息,自动检测机器人主机盒后侧下部凸出的平台侧边设有雷达模组,用于检测后方路面状态在后退时自动避障的同时采集路面宽度灯距长度的信息,自动检测机器人主机盒前部开凹槽安装路面观测摄像头,可以收集路面信息,在路灯观测摄像头、路面观测摄像头和雷达模组的相互配合下,可以通过收集的路灯灯距以及路面宽度信息自动规划测点位置,并根据测点信息自动规划路径后即可根据测点位置逐一检测,并自动计算平均照度以及照度均匀度,自动检测机器人主机盒后部通过凸出的平台安装两个警示灯,警示灯可以提示路面上的行人以及车辆自身所处位置防止阻碍行人或者车辆以免造成损失,自动检测机器人主机盒后部设有遮光天线板,用于接收通信信号、通过5g信号将数据传输至服务器以及定位设备信号的同时防止警示灯和辅助警示灯的光源对检测探头模组和路灯观测摄像头造成干扰,为使用者提供更详细的信息,遮光天线板后部表面设有辅助警示灯,进一步提示路面上的行人以及车辆自身所处位置防止阻碍行人或者车辆以免造成损失,自动检测机器人主机盒下部设有自动检测机器人行走部件,可以驱动路灯照度自动检测机器人按照规划的路线前进。
5.进一步的,所述的自动检测机器人主机盒内置控制机、通信装置以及电池包,提供必要的自动控制、通信以及电源供应。
6.进一步的,所述的检测探头模组配备照度检测探头和亮度检测探头,可以同时对亮度以及照度进行检测。
7.进一步的,所述的自动检测机器人行走部件配备转向电机,让路灯照度自动检测机器人可以灵活转向。
8.进一步的,所述的遮光天线板内置通信天线,用于同服务器以及遥控设备交换数据。
9.进一步的,所述的路灯观测摄像头配备多个摄像头,提升观测效率。
10.进一步的,所述的路灯观测摄像头高度低于检测探头模组一厘米以上,防止干扰检测探头模组。
11.借由上述方案,本实用新型至少具有以下优点:与常规手持检测相比,可以有效降低工作强度提升工作效率,有效保证了对路灯路面照度的数据采集、计算、传输。
附图说明
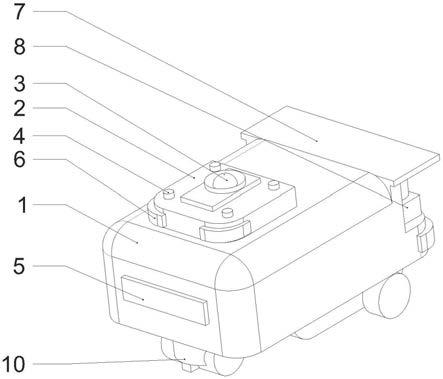
12.图1是本实用新型路灯照度自动检测机器人的立体图;
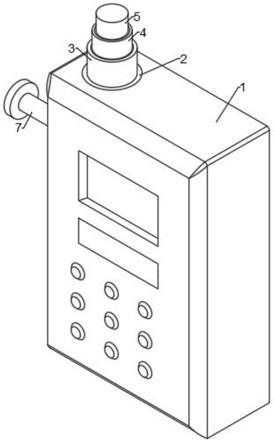
13.图2是本实用新型路灯照度自动检测机器人的侧视图;
14.图中:1、自动检测机器人主机盒,2、照度检测探头安装基台,3、检测探头模组,4、路灯观测摄像头,5、路面观测摄像头,6、雷达模组,7、遮光天线板,8、警示灯,9、辅助警示灯,10、自动检测机器人行走部件,11、自动检测机器人驱动轮组。
具体实施方式
15.下面结合附图对本实用新型作进一步说明。
16.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
17.如图1和图2所示,本路灯照度自动检测机器人,包括自动检测机器人主机盒1、照度检测探头安装基台2、检测探头模组3、路灯观测摄像头4、路面观测摄像头5、雷达模组6、遮光天线板7、警示灯8、辅助警示灯9和自动检测机器人行走部件10,所述的自动检测机器人主机盒1上部设有照度检测探头安装基台2,照度检测探头安装基台2上部设有检测探头模组3,可以对路灯路面照度进行检测,检测探头模组3四周的照度检测探头安装基台2上部设有两个以上的路灯观测摄像头4,路灯观测摄像头4用于让检测探头模组3可以在自动检测机器人行走部件10和自动检测机器人驱动轮组11的配合下处于路灯下最佳的检测位置,并且观测灯具现状,照度检测探头安装基台2前部边缘设有两个雷达模组6,用于检测前方路面状态自动避障的同时采集路面宽度灯距长度的信息,自动检测机器人主机盒1后侧下部凸出的平台侧边设有雷达模组6,用于检测后方路面状态在后退时自动避障的同时采集路面宽度灯距长度的信息,自动检测机器人主机盒1前部开凹槽安装路面观测摄像头5,可以收集路面信息,在路灯观测摄像头4、路面观测摄像头5和雷达模组6的相互配合下,可以通过收集的路灯灯距以及路面宽度信息自动规划测点位置,并根据测点信息自动规划路径
后即可根据测点位置逐一检测,并自动计算平均照度以及照度均匀度,自动检测机器人主机盒1后部通过凸出的平台安装两个警示灯8,警示灯8可以提示路面上的行人以及车辆自身所处位置防止阻碍行人或者车辆以免造成损失,自动检测机器人主机盒1后部设有遮光天线板7,用于接收通信信号、通过5g信号将数据传输至服务器以及定位设备信号的同时,防止警示灯8和辅助警示灯9的光源对检测探头模组3和路灯观测摄像头4造成干扰,为使用者提供更详细的信息,遮光天线板7后部表面设有辅助警示灯9,进一步提示路面上的行人以及车辆自身所处位置防止阻碍行人或者车辆以免造成损失,自动检测机器人主机盒1下部设有自动检测机器人行走部件10,可以驱动路灯照度自动检测机器人按照规划的路线前进。
18.所述的自动检测机器人主机盒1内置控制机、通信装置以及电池包,提供必要的自动控制、通信以及电源供应。
19.所述的路灯观测摄像头4配备多个摄像头,提升观测效率。
20.所述的自动检测机器人行走部件10配备转向电机,让路灯照度自动检测机器人可以灵活转向。
21.所述的遮光天线板7内置通信天线,用于同服务器以及遥控设备交换数据。
22.所述的路灯观测摄像头4配备多个摄像头,提升观测效率。
23.所述的路灯观测摄像头4高度低于检测探头模组3一厘米以上,防止干扰检测探头模组3。
24.使用时将路灯照度自动检测机器人设置好,充电后由工作人员携带至需要检测的路段,放下设备后工作人员即可通过遥控器控制设备运行,自动测量灯距和路面宽度并根据数据规划测点,对测点检测路面照度,设备收集的数据即可通过5g信号上传至服务器。
25.有益效果:因为设备采用了高度自动化的底盘和内置控制器,设备只需少量人工干预即可保证任务正常执行,因此可以有效降低工作强度提升工作效率,降低工作强度,提升工作效率,降低检测误差,有效保证了对路灯照度、亮度的数据采集。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。