1.本实用新型涉及印刷设备技术领域,具体涉及一种高精度、高响应速度的负压正压控制系统。
背景技术:
2.在包装印刷企业,一般都配有凹印机、胶印机、模切机和烫金机等设备,这些设备上通常加装有喷墨喷码系统,这些喷墨系统一般都采用负压供墨的方式。由于这些设备的生产速度较快,一般在60m/min到250m/min不等,因此,其对于喷墨系统的负压控制要求比较高;当喷码系统生产过程中如果发生堵孔、斜喷、气泡等质量问题时,需要对有问题的喷头进行不停机压墨维护(即生产正常进行,不停机),喷头需要从负压切换到正压,执行压墨,之后再恢复到负压状态,这种操作一般至少需要10秒钟以上,而快速运行的设备在此期间生产的产品都属于不合格品,每次维护时都会过多的浪费纸张和油墨。
3.现有凹印机、胶印机、模切机和烫金机等设备加装的喷墨喷码系统的负压控制,其主要技术问题如下:
4.第一,压墨维护时,需要的时间长。由于负压发生设备一般安装于机柜内,与喷码系统的副墨盒距离一般在5
‑
10m左右,负压一般通过负压气泵和负压缓冲瓶为副墨盒提供负压,正压是通过正压泵和正压缓冲瓶为副墨盒提供正压,在压墨维护时,副墨盒的压力从负压(
‑
3到
‑
5kpa)逐渐增长到压墨需要的正压值(一般是15
‑
40kpa),需要将负压瓶和管路里的气体从负压转变为正压,压墨结束后再从正压转变到负压,完全一样的一个逆过程,这整个过程一般需要至少10秒钟的时间(负压瓶,副墨盒,管路里的空气体积越大,这个时间就越长)。如果按照生产速度180m/min计算,每秒钟走纸3米,10秒钟就是30m,这30m所对应的产品均为不合格品,如果压墨时停机,从停机开始到恢复到正常生产速度之间的产品,也是不合格品,实际不合格品会大于30m,更加不经济;
5.第二,由于负压值依靠气泵旋转和电磁阀控制大气连通,因此即使气泵有pid调整,负压控制仍然不够精准,一般在
±
0.1kpa,变化区间大,容易造成喷头状态不好,影响喷墨稳定性。如果改变pid,提升调整能力,则会导致控制精度误差加大;如果提升pid调整精度,势必加长了响应时间,导致压力变化,从而需要更长的时间来稳定。
技术实现要素:
6.本实用新型的目的是提供一种高精度、高响应速度的负压正压控制系统,以解决现有技术中存在的现有用于压墨喷码的正负压控制系统其控制效果差和响应速度慢的技术问题;本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果(正压系统包括正压瓶和正压管路,正压瓶能够储存气体,配合正压管路和正压电磁阀,用于副墨盒正压的提供和控制;正压管路上设置有过滤器,能够过滤气源中的杂质,避免杂质影响压墨维护;一级负压瓶、二级负压瓶和正压瓶分别设置有第一负压表、第二负压表和正压表,分别用于对应负压和正压的测量监控;二级负压瓶连接设置有负压辅助控制管路,其与
大气连通,当其内部负压较大时,通过负压辅助控制管路能够适当泄压,从而起到辅助负压控制的作用;二级负压瓶设置有负压传感器,负压控制能够实现自动化、智能化;负压正压控制系统包括第一支路和第二支路,通过输送气体实现负压和正压的发生;第一支路和第二支路上分别设置有第一调节阀和第二调节阀,分别用于第一支路和第二支路的流通控制;第一支路和第二支路前端均与主管路连接,主管路能够将气源提供的气体分流至第一支路和第二支路;主管路上设置有油液分离装置,有效分离气源中的水和油;压力发生装置包括负压泵和正压泵,采用两个独立的气泵,分别用于负压管路和正压管路压力的发生;压力发生装置包括工业气源和负压发生器,工业气源配合正压瓶,用于正压的控制,负压发生器为独立的气源装置,配合二级负压调整结构用于负压的控制;压力发生装置包括气泵,通过控制气泵正反转,第一调节阀和第二调节阀的启闭,实现负压和正压的发生等);详见下文阐述。
7.为实现上述目的,本实用新型提供了以下技术方案:
8.本实用新型提供的一种高精度、高响应速度的负压正压控制系统,包括压力发生装置、负压系统、正压系统和控制系统,所述压力发生装置、所述负压系统和所述正压系统均与所述控制系统电连接,其中:所述压力发生装置与所述正压系统和所述负压系统相连,为所述正压系统和所述负压系统提供气源;所述负压系统包括负压管路,所述负压管路上依次设置有一级负压瓶、第一调速阀、第一电磁阀和二级负压瓶,所述负压管路的末端设置有负压电磁阀,所述负压电磁阀与副墨盒前端的调压管路相连。
9.优选地,所述正压系统包括正压瓶,所述正压管路上依次设置有过滤器和正压瓶,所述正压管路的末端设置有正压电磁阀,所述正压电磁阀与所述副墨盒前端的调压管路相连。
10.优选地,所述一级负压瓶设置有第一负压表;所述二级负压瓶设置有第二负压表;所述正压瓶设置有正压表。
11.优选地,所述二级负压瓶连接设置有负压辅助控制管路,所述负压辅助控制管路与大气连通,所述负压辅助控制管路上设置有第二调速阀和第一辅助电磁阀;所述二级负压瓶设置有负压传感器,所述负压传感器与所述控制系统电连接。
12.优选地,所述调压管路设置有压力辅助控制管路,所述压力辅助控制管路与大气连通,所述压力辅助控制管路上设置有第二辅助电磁阀。
13.优选地,所述高精度、高响应速度的负压正压控制系统包括第一支路和第二支路,其中:所述第一支路和所述第二支路上分别设置有第一调节阀和第二调节阀;所述第一支路和所述第二支路分别连通设置在所述负压系统前端和所述正压系统前端。
14.优选地,所述第一支路前端和所述第二支路前端均与主管路连接;所述主管路上设置有油液分离装置。
15.优选地,所述压力发生装置包括负压泵和正压泵,其中:所述负压泵和所述正压泵分别设置在所述第一支路和所述第二支路上。
16.优选地,所述压力发生装置包括工业气源和负压发生器,其中:所述主管路前端与所述工业气源相连;所述负压发生器设置在所述第一支路上。
17.优选地,所述压力发生装置包括气泵,所述气泵设置在所述主管路上。
18.本实用新型提供的一种高精度、高响应速度的负压正压控制系统至少具有以下有
益效果:
19.所述高精度、高响应速度的负压正压控制系统包括压力发生装置、负压系统、正压系统和控制系统,所述压力发生装置、所述负压系统和所述正压系统均与所述控制系统电连接,压力发生装置为负压系统和正压系统的负压源和正压源,控制系统用于整个系统的总控;在正常喷墨运行时,负压系统为副墨盒提供负压,在需要压墨维护时,正压系统为副墨盒提供正压。
20.所述负压系统包括负压管路,所述负压管路上依次设置有一级负压瓶、第一调速阀、第一电磁阀和二级负压瓶,第一调速阀用于一级负压瓶和二级负压瓶之间气体流速的控制,第一电磁阀用于一级负压瓶和二级负压瓶之间管路的连通控制。
21.所述负压管路的末端设置有负压电磁阀,所述负压电磁阀与副墨盒前端的调压管路连接,通过负压电磁阀闭合能够将副墨盒切换至负压状态。
22.本实用新型采用一级负压瓶和二级负压瓶相结合的二级负压调控结构,通过调整一级负压和二级负压之间的压差值,以及第一调速阀和负压电磁阀,形成负压闭环控制,相比较传统的一级负压控制,具有负压恒定、控制精准和响应迅速的特点,能够为喷墨的工业化生产提供可靠的负压控制和高效的压膜维护手段。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1是本实用新型单副墨盒单喷头负压正压控制系统结构示意图;
25.图2
‑
图4是本实用新型多副墨盒多喷头负压正压控制系统结构示意图;
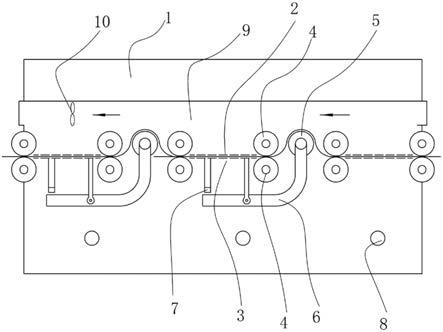
26.图5是本实用新型实施例2结构示意图;
27.图6是本实用新型多副墨盒多喷头负压正压控制系统控制状态示意图。
28.图7是本实用新型实施例3结构示意图;
29.图8是本实用新型实施例4结构示意图。
30.附图标记
31.1、负压系统;101、负压发生器;102、负压管路;103、第一电磁阀;104、第二调速阀;105、第一辅助电磁阀;106、负压传感器;107、第二负压表;108、负压辅助控制管路;109、二级负压瓶;110、第一调速阀;111、第一负压表;112、负压电磁阀;113、一级负压瓶;114、负压泵;115、气泵;2、正压系统;201、正压瓶;202、正压电磁阀;203、正压管路;204、正压表;205、正压泵;3、控制系统;4、调压管路;41、压力辅助控制管路;42、第二辅助电磁阀;5、主管路;51、油液分离装置;52、第一支路;53、第一调节阀;54、过滤器;55、第二支路;56、第二调节阀;6、副墨盒;7、喷头。
具体实施方式
32.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部
的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
33.实施例1:
34.本实用新型提供了一种高精度、高响应速度的负压正压控制系统,如图1
‑
图3所示,所述高精度、高响应速度的负压正压控制系统包括压力发生装置、负压系统1、正压系统2和控制系统3,负压系统1和正压系统2均与控制系统3电连接。
35.负压系统1包括负压管路102,负压管路102上依次设置有一级负压瓶113、第一调速阀110、第一电磁阀103和二级负压瓶109,负压管路102的末端设置有负压电磁阀112,负压电磁阀112与副墨盒6前端的调压管路4相连。
36.在正常喷墨进行时,控制系统3控制正压系统2关闭,控制第一调速阀110、第一电磁阀103以及负压电磁阀112打开,一级负压瓶113和二级负压瓶109相互配合为副墨盒6提供稳定的负压。
37.在需要压墨维护时,控制系统3控制负压系统1关闭,控制正压系统2开启,正压系统2为副墨盒6提供正压,从而实现压墨功能。
38.在上述负压控制的过程中,一级负压瓶113和二级负压瓶109形成二级负压调整结构,通过调整一级负压瓶113和二级负压瓶109之间的压差值,以及第一调速阀110和第一电磁阀103,形成一高精度、高响应速度的负压闭环控制。
39.现有的一级负压控制,其控制精度和响应速度通常相互矛盾,不可兼得;现有的一级负压控制,其如果负压值过大,则需要将负压和大气相连,若空气流速过快,则会导致负压值过多的超过限定值,若流速过小,达到限定值的时间则过长。而本实用新型所采用的二级负压调整结构,则能够解决该问题,所述二级负压调整结构通过调整一级负压瓶113和二级负压瓶109之间的压差来提高负压控制的精度,并且,负压电磁阀112其启闭频率要求在50hz以上,可以实现高速启闭,能够同时满足高精度和高响应的要求。
40.实施例2
41.实施例2建立在实施例1的基础上:
42.如图4所示,正压系统2包括正压管路203,正压管路203上设置有正压瓶201,正压瓶201通过提前储存气体,使其始终保持一定的正压,便于后续的压膜维护,能够有效缩短压墨出墨时间。
43.正压管路203上位于正压瓶201的上游位置设置有过滤器54,用于气源中杂质的过滤,避免后续影响压墨。
44.正压管路203的末端设置有正压电磁阀202,正压电磁阀202与副墨盒6前端的调压管路4相连;正压电磁阀202其启闭频率要求在50hz以上,配合负压电磁阀112,能够实现正压与负压的快速切换。
45.作为可选地实施方式,如图3所示,一级负压瓶113设置有第一负压表111,能够实时显示一级负压瓶113的负压值,其量程为
‑
10kpa~
‑
20kpa。
46.二级负压瓶109设置有第二负压表107,能够实时显示二级负压瓶109的负压值。
47.如图4所示,正压瓶201设置有正压表204,能够实时显示正压瓶201的正压值,其量程为0kpa~100kpa。
48.作为可选地实施方式,正压瓶201设置有正压传感器,正压瓶201的上游位置设置
有第二电磁阀,所述正压传感器和所述第二电磁阀与控制系统3电连接,能够实现正压瓶201内部压力的自动控制。
49.当所述正压传感器检测到正压瓶201内部的压力降低时,控制系统3控制气源补充至正压瓶201内,使其始终恒定在一定的正压范围内,用于后续的压墨维护。
50.作为可选地实施方式,如图3所示,二级负压瓶109连接设置有负压辅助控制管路108,负压辅助控制管路108与大气连通,负压辅助控制管路108上设置有第二调速阀104和第一辅助电磁阀105。
51.二级负压瓶109设置有负压传感器106,负压传感器106与控制系统3电连接。
52.在负压控制的过程中,控制系统3根据负压传感器106的输入值与设定的负压值差,控制第一电磁阀103和第一辅助电磁阀105高速切换,从而保持二级负压瓶109的负压在设定值左右波动,使其恒定在设定的精度范围内,与此同时,负压电磁阀112为打开状态,副墨盒6产生负压,在不考虑压损的情况下,副墨盒6液面的负压与二级负压瓶109的负压一致,维持在恒定状态。
53.例如,将二级负压瓶109的负压值设定为
‑
5kpa,当检测到二级负压瓶109的负压为
‑
4.9kpa时,控制系统3控制第一电磁阀103打开,由于一级负压瓶113内的负压为
‑
10kpa(
‑
10kpa~
‑
20kpa),则二级负压瓶109的负压将从
‑
4.9kpa逐渐增长,当二级负压瓶109的负压超过
‑
5kpa时,控制系统3控制第一电磁阀103关闭,第一辅助电磁阀105打开,二级负压瓶109与大气连通,二级负压瓶109负压降低,从而使二级负压瓶109的负压始终恒定在
‑
5kpa左右波动。在此过程中,通过设定第一调速阀110和第二调速阀104的开度,可以进一步改变压力调整的响应速度,再结合第一电磁阀103和第一辅助电磁阀105的启闭频率,能够有效实现压力值的精准调节。
54.作为可选地实施方式,负压系统1前端设置第三电磁阀,一级负压瓶113上安装第二负压传感器,所述第三电磁阀以及所述第二负压传感器均与控制系统3电连接。
55.当一级负压瓶113达到其设定值时,控制系统3控制所述第三电磁阀关闭,能够有效节省气源消耗;
56.当一级负压瓶113低于其设定值时,控制系统3控制所述第三电磁阀打开,加大负压。
57.一级负压瓶113和二级负压瓶109均为压力稳定装置,其容积可以从500ml
‑
5l不等,其具体容积取决于实际需要,容积越大,控制越平稳;优选地,一级负压瓶113的压力为二级负压瓶109压力的2~3倍。
58.作为可选地实施方式,如图2所示,所述高精度、高响应速度的负压正压控制系统包括第一支路52和第二支路55,第一支路52连通设置在负压系统1前端,第一支路52上设置有第一调节阀53。
59.第二支路55连通设置在正压系统2前端,第二支路55上设置有第二调节阀56。
60.第一调节阀53和第二调节阀56设置为手动阀或者电控阀。
61.作为可选地实施方式,如图4所示,调压管路4设置有压力辅助控制管路41,压力辅助控制管路41与大气连通,压力辅助控制管路41上设置有第二辅助电磁阀42,第二辅助电磁阀42和压力辅助控制管路41用于副墨盒6的泄压。
62.压墨时喷头7喷孔为正压,墨水被压出喷头7喷孔;当压墨结束时,喷头7喷孔切换
到负压,若切换过快,会导致喷头7喷孔压差变大,有可能将喷孔周围的气泡吸入到喷孔中,导致喷孔无法正常工作;而通过第二辅助电磁阀42和压力辅助控制管路41,控制系统3可以精密控制泄压的速度,确保喷孔周围气泡不会被吸入,同时,还能监督负压恢复的时间不会过长而增加压墨维护时长。
63.本实用新型通过在副墨盒6前端设置正压电磁阀202、负压电磁阀112和第二辅助电磁阀42,实现正负压切换和泄压,由于正压电磁阀202、负压电磁阀112和第二辅助电磁阀42均设置在靠近副墨盒6的位置,因此最大限度地限定了需要正负压切换的气体容积,进一步缩短了正负压切换的响应时间。
64.可选地,压力辅助控制管路41上设置有第三调速阀,用于泄压速度的控制,进一步增加精准控制副墨盒6压力变化的响应性能,实现喷头7的进一步精准控制。
65.作为可选地实施方式,参考图1和图2,副墨盒6的数量为一个以上,负压电磁阀112和正压电磁阀202数量与副墨盒6的数量相同。
66.所有副墨盒6前端均设置有调压管路4,所有调压管路4与负压系统1连接,所有调压管路4与正压系统2连接。
67.当所述高精度、高响应速度的负压正压控制系统控制多路副墨盒6和喷头7时,无论副墨盒6及相应调压管路4数量的多少,其相互之间均不影响,在每一路单独做压墨维护时,均能始终保持一样的响应速度,并且不会影响其他路的负压控制,整体系统满足工业生产所要求的稳定性和高效率。
68.作为可选地实施方式,控制系统3包括控制模块,所述高精度、高响应速度的负压正压控制系统其电控阀、传感器等电器元件均与所述控制模块电连接。
69.作为可选地实施方式,如图3所示,第一支路52前端和第二支路55的前端均与主管路5连接,主管路5上设置有油液分离装置51,油液分离装置51设置为油液分离三联件,能够去除气源中的水和油。
70.以图2为例,参考图6:
71.当系统运行后,一级负压瓶113前端的第一调节阀53开启,负压发生器101工作,一级负压瓶113维持在基本稳定的负压值,二级负压瓶109维持一个精度较高的负压值;正压瓶201维持一个基本稳定的正压。
72.在正常喷墨运行时,两个负压电磁阀112保持在打开状态,为副墨盒6提供稳定的负压。
73.在需要压墨维护时,控制系统3关闭两个负压电磁阀112,并打开两个正压电磁阀202,将正压瓶201的正压引入副墨盒6,从而为喷头7提供正压,实现压墨功能。
74.当压墨结束后,控制系统3关闭两个正压电磁阀202,并打开两个第二辅助电磁阀42,将副墨盒6内的压力释放至大气,待释放完毕后,关闭两个第二辅助电磁阀42,打开两个负压电磁阀112,为副墨盒6提供负压支持。
75.实施例3
76.实施例3与实施例1的不同点在于:
77.如图7所示,第一支路52前端和第二支路55前端勿需设置主管路5.
78.所述压力发生装置包括负压泵114和正压泵205,
79.负压泵114和正压泵205分别设置在第一支路52和第二支路55上。
80.实施例4
81.实施例4与实施例1的不同点在于:
82.如图8所示,所述压力发生装置设置为气泵115,气泵115上设置在主管路5上,主管路5上设置有三通阀,其一端连接有通气管。
83.在正常喷墨运行时,第一调节阀53打开,第二调节阀56关闭,气泵115反转,所述通气管出气,系统输出负压。
84.在需要压墨维护时,第一调节阀53关闭,第二调节阀56打开,气泵115正转,所述通气管进气,系统输出正压。
85.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。