1.本实用新型涉及园林机械技术领域领域,尤其涉及一种公路绿化隔离带养护机。
背景技术:
2.为满足高速公路行车安全要求,会在道路中间设置绿化隔离带,绿化隔离带能够遮挡相反车道上车辆的灯光,从而减少因“炫目”导致的交通事故。绿化隔离带中的树木每隔一段时间需要修剪一次,以免长得过高后倒伏到高速公路上,也避免长出防护栏挤占道路,影响行车安全。现有的高速公路绿化隔离带通常是人工修剪,或者通过工程养护车开在最靠近高速防护栏的车道上通过修剪工具进行修剪,修剪速度较慢,无论是人还是工程养护车,在修剪时都需要对所在的车道进行封锁,远远的通过放置警示牌进行路段隔离,但由于高速公路车速较快,容易忽略警示牌,或由于变道未注意警示牌,或由于车辆高速行驶带起的风或自然风将警示牌吹翻吹走,导致有些高速行驶的车辆未能获得警示造成追尾及撞击事件,此类交通安全事故不在少数,每每发生都让人痛心疾首。
技术实现要素:
3.本实用新型的目的在于,提供一种公路绿化隔离带养护机,对绿化隔离带进行修剪,并且不占用车道,减少修剪及养护作业过程产生的安全问题,并有效提高修剪养护的效率。
4.为解决上述技术问题,本实用新型采用如下的技术方案:
5.一种公路绿化隔离带养护机,包括两台单侧修剪机,每台单侧修剪机包括移动小车与设置在移动小车上的修剪组件和修剪方位改动组件,移动小车自带动力,两辆移动小车均邻近绿化隔离带设置,移动小车的车身宽度不大于护栏与邻近公路实线的间距,移动小车的车身不超过邻近公路实线设置,所述修剪方位改动组件包括使修剪组件靠近或远离绿化隔离带的线性驱动件和旋转驱动件,修剪组件经两个线性驱动件驱动在水平或竖直方向移动,修剪组件经旋转驱动件驱动后转动。
6.本实用新型提供的公路绿化隔离带养护机,两台单侧修剪机组成一个完整的修剪设备,对中央绿化隔离带的上方和两侧进行组合修剪,修剪时,两辆移动小车分设在中央绿化隔离带两侧,由于移动小车的车身宽度不大于护栏与邻近公路实线的间距,移动小车的车身不超过邻近公路实线设置,因此不会占用机动车道,设置在移动小车上的所有部件均不超过邻近公路实线设置,从而使得中央绿化隔离带的修剪可以更加安全;且修剪方位改动组件的线性驱动件和旋转驱动件能够对修剪组件进行水平或竖直方向移动,从而能够控制对绿化隔离带的修剪深度,其中线性驱动件可以设置为气缸、液压缸,线性驱动件可以设置为直流电动机、异步电动机和同步电动机;通过给移动小车设置驱动组件,从而提供移动的动力,使得移动小车实现自行移动,不需要人力推动和操作,移动小车能够载着修剪组件在不占用车道的情况下对绿化隔离带进行高效安全的修剪工作;
7.所述移动小车设置有驱动移动小车移动的驱动组件,所述驱动组件设置为以下几
种形式之一:
8.所述驱动组件包括电机、变速箱、齿轮和传动轴,电机经变速箱、齿轮和传动轴驱动移动小车移动;
9.所述驱动组件包括电机、变速箱、齿轮、齿带和传动轴,电机经变速箱、齿轮、齿带和传动轴驱动移动小车移动;
10.所述驱动组件包括电机、变速箱、齿轮、链条和传动轴,电机经变速箱、齿轮、链条和传动轴驱动移动小车移动。
11.在本实用新型的一种可能的实施方式中,所述修剪组件设置为以下几种形式之一:
12.修剪组件包括固定连接的竖向切割件和横向切割件,所述竖向切割件和横向切割件经两个线性驱动件驱动在水平或竖直方向整体移动,所述竖向切割件和横向切割件经旋转驱动件驱动在水平面内整体转动;
13.修剪组件包括转动设置的竖向切割件和横向切割件,所述修剪方位改动组件包括线性驱动件和旋转驱动件,所述竖向切割件和横向切割件经两个线性驱动件驱动在水平或竖直方向整体移动,所述竖向切割件和横向切割件经旋转驱动件驱动在水平面内转动;
14.所述修剪组件包括转动设置的竖向切割件和横向切割件,所述修剪方位改动组件包括线性驱动件和旋转驱动件,所述竖向切割件和横向切割件经两个线性驱动件驱动在水平或竖直方向整体移动,所述竖向切割件和横向切割件经旋转驱动件驱动在竖直面内转动。
15.通过本实用新型的上述可能的实施方式,修剪组件设置为竖向切割件和横向切割件可以对绿化隔离带两侧及上方进行修剪,修剪组件的竖向切割件和横向切割件工作时呈“l”形设置,其中竖向切割件和横向切割件的设置形式为电机带动带刃刀片旋转,也可以是电机带动齿轮及带刃链条进行旋转,带刃链条的样式参考电锯;其中竖向切割件被两个垂直设置的线性驱动件驱动实现水平及竖直方向的移动,当横向切割件与竖向切割件固定连接时,则横向切割件同竖向切割件一起被两个垂直设置的线性驱动件驱动实现水平及竖直方向的移动;当横向切割件与竖向切割件转动设置,其中横向切割件在水平面内转动设置的话,横向切割件能够以水平面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,避免碰撞,使得对绿化隔离带的修剪更加安全;当横向切割件与竖向切割件转动设置,其中横向切割件在竖直面内转动设置的话,横向切割件能够以竖直面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,通常从“l”形转动为上下竖直且平行分布,避免碰撞障碍物,使得对绿化隔离带的修剪更加安全,相对于横向切割件水平转动避让的情况,能够更近的将横向切割件恢复成横向切割状态,更快的恢复避让之后的修剪。
16.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有限位导向组件,限位导向组件设置为以下几种形式之一:
17.所述限位导向组件包括限位导向轮,两组限位导向轮夹设在护栏横栏的内外两侧;
18.所述限位导向组件包括限位滑槽,所述限位滑槽以护栏横栏为轨;
19.所述限位导向组件包括距离传感器,距离传感器感应与护栏的间距;
20.所述限位导向组件包括gps导航,通过gps导航规划行进路线。
21.通过本实用新型的上述可能的实施方式,修剪机在移动修剪的过程中如果偏离修剪轨道,越过邻近的公路实线,则有可能和高速行驶的车辆发生碰撞,造成恶劣的交通事故,因此设置限位导向组件,保证移动小车沿着绿化隔离带侧面进行移动能够大幅提高移动小车的定向行驶能力,减少交通事故发生,提高移动修剪的安全性;其中通过设置两组限位导向轮夹设在护栏横栏的内外两侧或设置限位滑槽以护栏横栏为轨,都能够使移动小车行驶时以护栏为标准行驶,且由于导向轮或限位滑槽在水平方向的限位作用,也大幅提高了移动小车的安全行驶性能;其中,除了硬件类的限位导向组件外,还可使用距离传感器、gps导航、雷达、电子围栏等形式限制移动小车行驶在相邻的公路实线内。
22.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有割草组件,所述割草组件包括切割刀具和设置于移动小车处的伸缩件,所述切割刀具经伸缩件伸缩对绿化隔离带底部进行修剪。
23.通过本实用新型的上述可能的实施方式,割草组件设置为切割刀具和伸缩件,伸缩件的固定端与移动小车固定连接,移动端与切割刀具连接,伸缩件的设置形式可以为多级伸缩臂(参见吊机的伸缩臂),切割刀具为通过电机带动旋转的带刃刀片(如切割机、割草机的刀片),割草组件能够对绿化隔离带的下侧进行修剪,减少下侧植物和草向公路伸出,是对绿化隔离带上侧及两侧修剪后的补充修剪,能够减少因下侧植物和草伸向公路阻碍交通产生的交通事故,从而提高了行车安全;其中,针对割草组件割下的草,设有用于收集断草及枝叶的的收集装置,收集装置与收集组件的技术特征相同,同样设置引风机、外扩形收集口、收集管、收集箱、出风口和至少一层过滤网,但收集装置的外扩形收集口吸力范围覆盖切割刀具修剪处;另也可以是在原有收集组件的基础上,在收集箱上额外设置一个收集管和吸力范围覆盖切割刀具的外扩形收集口,即时进行断草和枝叶收集,避免人工二次清扫,能够减少断草、枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低对行驶车辆的影响和行驶车辆发生事故的概率。
24.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有收集组件,所述收集组件包括引风机、外扩形收集口、收集管、收集箱、出风口和至少一层过滤网,所述外扩形收集口设置在竖向收割件侧面,所述收集管和出风口均连通设置在收集箱上,所述引风机和过滤网均设置于收集箱内,风顺次穿过外扩形收集口、收集管、收集箱、过滤网和出风口。
25.通过本实用新型的上述可能的实施方式,设置收集组件能够将修剪后的枝叶进行收集,减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率;其中,具体通过引风机提供吸力,将经修剪组件修剪后的枝叶顺次从外扩形收集口、收集管吸到收集箱中,通过过滤网截留住。
26.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有粉碎组件,所述粉碎组件包括设置在收集箱内的至少一个粉碎刀具。
27.通过本实用新型的上述可能的实施方式,通过在收集箱中设置粉碎刀具,从而能够将收集到收集箱中的枝叶进行粉碎处理,为了粉碎的更彻底,可设置多把粉碎刀具,粉碎刀具可采用豆浆机的刀头,并经电机带动转动,收集箱中枝叶粉碎后占得位置更小,收集的更多,并且配合施肥组件,能够将粉碎后的枝叶作为植物肥输送到绿化隔离带下方,即时进行枝叶处理,避免人工二次清扫,使得绿化隔离带内的植物营养好,长得致密,减少因植物
稀疏挡不住对面道路灯光引起的交通事故,也减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率。
28.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有施肥组件,所述施肥组件包括排风机和连通设置在收集箱处的排风口,排风机将收集箱内的枝叶从排风口排出。
29.通过本实用新型的上述可能的实施方式,能够将粉碎后的枝叶作为植物肥输送到绿化隔离带下方,即时进行枝叶处理,避免人工二次清扫,使得绿化隔离带内的植物营养好,长得致密,减少因植物稀疏挡不住对面道路灯光引起的交通事故,也减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率。
30.在本实用新型的一种可能的实施方式中,所述伸缩件的设置形式为多级伸缩臂或多级旋转臂。
31.通过本实用新型的上述可能的实施方式,伸缩件的设置形式为多级伸缩臂(参见吊机的伸缩臂),也可以是多级旋转臂(参见工业机器人的多级旋转手臂)多级旋转臂的旋转关节处采用舵机或电机等回转驱动件带动转动。
32.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有避让组件,避让组件包括图像采集模块、数据分析模块和控制模块,图像采集模块可设置为工业相机或摄像头,不断对绿化隔离带前方拍摄,拍摄到的图像由数据分析模块对比识别是否存在障碍物,控制模块与单侧修剪机所有可控的元器件连接,数据分析模块和控制模块可设置为单片机、plc控制器,控制模块根据数据分析模块的分析结果控制线性驱动件或旋转驱动件带动竖向切割件或横向切割件动作,实现障碍物的避让。
33.通过本实用新型的上述可能的实施方式,避让组件的存在可以判断横向切割件和竖向切割件的前方是否有障碍物,从而实现横向切割件和竖向切割件的避让;其中竖向切割件被两个垂直设置的线性驱动件驱动实现水平及竖直方向的移动,当横向切割件与竖向切割件固定连接时,则横向切割件同竖向切割件一起被两个垂直设置的线性驱动件驱动实现水平及竖直方向的移动;当横向切割件与竖向切割件转动设置,其中横向切割件在水平面内转动设置的话,横向切割件能够以水平面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,避免碰撞,使得对绿化隔离带的修剪更加安全;当横向切割件与竖向切割件转动设置,其中横向切割件在竖直面内转动设置的话,横向切割件能够以竖直面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,通常从“l”形转动为上下平行分布,避免碰撞障碍物,使得对绿化隔离带的修剪更加安全,相对于横向切割件水平转动避让的情况,能够更近的将横向切割件恢复成横向切割状态,更快的恢复避让之后的修剪;其中,避让组件控制横向切割件和竖向切割件进行避让操作时,横向切割件和竖向切割件均不超过邻近公路实线设置。
34.在本实用新型的一种可能的实施方式中,每台单侧修剪机还设有远程控制组件,所述远程控制组件包括远程显示控制一体器和两个传递信号的无线信号收发器,无线信号收发器和图像采集模块、数据分析模块和控制模块、远程显示控制一体器信号连接,远程显示控制一体器接收无线信号收发器传来的图像采集模块的画面数据,操作人员通过远程显示控制一体器发送操作信号给无线信号收发器,无线信号收发器将操作指令传递给控制模
块,控制模块根据操作指令控制相应的可控的元器件进行动作。
35.通过本实用新型的上述可能的实施方式,如此设置的目的是实现远程无人操控,远程无人操控由于不需要人员在现场作业,因此出现交通事故造成人员伤亡的概率被降到极低;其中无线信号收发器可以为蓝牙信号好收发器、wifi信号好收发器、无线电信号好收发器、移动网络信号好收发器等,其中远程显示控制一体器可以看作是具有信号输入设备及显示设备的装置,如显示器配鼠标键盘,如有必要加上电脑主机等处理器,其中可控的元器件是指前述提到的:带动力的移动小车、竖向切割件、修剪方位改动组件、线性驱动件、旋转驱动件、伸缩件、切割刀具、引风机、粉碎刀具、排风机、水泵等提到的电动、气动的可控元器件。
附图说明
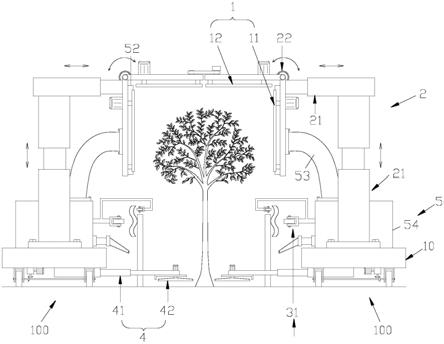
36.图1是本发明其中一种切割刀具设置的结构示意图;
37.图2是本发明另一种切割刀具设置的结构示意图;
38.图3是本发明另一种切割刀具设置的结构示意图;
39.图4是图3中横向切割件规避障碍物的状态图;
40.图5是收集箱处的示意图;
41.图6是避让组件和远程控制组件的连接示意图。
42.附图标记的含义:100、单侧修剪机;10、移动小车;1、修剪组件;11、竖向切割件;12、横向切割件;2、修剪方位改动组件;21、线性驱动件;22、旋转驱动件;3、限位导向组件;31、限位导向轮;32、限位滑槽;4、割草组件;41、伸缩件;42、切割刀具;5、收集组件;51、引风机;52、外扩形收集口;53、收集管;54、收集箱;55、出风口;56、过滤网;6、粉碎组件;61、粉碎刀具;7、施肥组件;71、排风机;72、排风口;8、避让组件;81、图像采集模块;82、数据分析模块;83、控制模块;9、远程控制组件;91、远程显示控制一体器;92、无线信号收发器。
43.下面结合附图和具体实施方式对本实用新型作进一步的说明。
具体实施方式
44.一种公路绿化隔离带养护机,如图1至图6所示,包括两台单侧修剪机100,每台单侧修剪机100包括移动小车10与设置在移动小车10上的修剪组件1和修剪方位改动组件2,移动小车10自带动力,两辆移动小车10均邻近绿化隔离带设置,移动小车10的车身宽度不大于护栏与邻近公路实线的间距,移动小车10的车身不超过邻近公路实线设置,修剪方位改动组件2包括使修剪组件1靠近或远离绿化隔离带的线性驱动件21和旋转驱动件22,修剪组件1经两个线性驱动件21驱动在水平或竖直方向移动,修剪组件1经旋转驱动件22驱动后转动。
45.本实施例提供的公路绿化隔离带养护机,两台单侧修剪机100组成一个完整的修剪设备,对中央绿化隔离带的上方和两侧进行组合修剪,修剪时,两辆移动小车10分设在中央绿化隔离带两侧,由于移动小车10的车身宽度不大于护栏与邻近公路实线的间距,移动小车10的车身不超过邻近公路实线设置,因此不会占用机动车道,设置在移动小车上的所有部件均不超过邻近公路实线设置,从而使得中央绿化隔离带的修剪可以更加安全;且修剪方位改动组件2的线性驱动件21和旋转驱动件22能够对修剪组件1进行水平或竖直方向
移动,从而能够控制对绿化隔离带的修剪深度,其中线性驱动件21可以设置为气缸、液压缸,线性驱动件21可以设置为直流电动机、异步电动机和同步电动机;通过给移动小车10设置驱动组件,从而提供移动的动力,使得移动小车10实现自行移动,不需要人力推动和操作,移动小车10能够载着修剪组件1在不占用车道的情况下对绿化隔离带进行高效安全的修剪工作;
46.移动小车10设置有驱动移动小车10移动的驱动组件,驱动组件设置为以下几种形式之一:
47.驱动组件包括电机、变速箱、齿轮和传动轴,电机经变速箱、齿轮和传动轴驱动移动小车10移动;
48.驱动组件包括电机、变速箱、齿轮、齿带和传动轴,电机经变速箱、齿轮、齿带和传动轴驱动移动小车10移动;
49.驱动组件包括电机、变速箱、齿轮、链条和传动轴,电机经变速箱、齿轮、链条和传动轴驱动移动小车10移动。
50.在本实施例的一种可能的实施方式中,修剪组件1设置为以下几种形式之一:
51.如图1所示,修剪组件1包括固定连接的竖向切割件11和横向切割件12,竖向切割件11和横向切割件12经两个线性驱动件21驱动在水平或竖直方向整体移动,竖向切割件11和横向切割件12经旋转驱动件22驱动在水平面内整体转动;
52.如图2所示,修剪组件1包括转动设置的竖向切割件11和横向切割件12,修剪方位改动组件2包括线性驱动件21和旋转驱动件22,竖向切割件11和横向切割件12经两个线性驱动件21驱动在水平或竖直方向整体移动,竖向切割件11和横向切割件12经旋转驱动件22驱动在水平面内转动;
53.如图3和图4所示,修剪组件1包括转动设置的竖向切割件11和横向切割件12,修剪方位改动组件2包括线性驱动件21和旋转驱动件22,竖向切割件11和横向切割件12经两个线性驱动件21驱动在水平或竖直方向整体移动,竖向切割件11和横向切割件12经旋转驱动件22驱动在竖直面内转动。
54.通过本实施例的上述可能的实施方式,修剪组件1设置为竖向切割件11和横向切割件12可以对绿化隔离带两侧及上方进行修剪,修剪组件1的竖向切割件11和横向切割件12工作时呈“l”形设置,其中竖向切割件11和横向切割件12的设置形式为电机带动带刃刀片旋转,也可以是电机带动齿轮及带刃链条进行旋转,带刃链条的样式参考电锯;其中竖向切割件11被两个垂直设置的线性驱动件21驱动实现水平及竖直方向的移动,当横向切割件12与竖向切割件11固定连接时,则横向切割件12同竖向切割件11一起被两个垂直设置的线性驱动件21驱动实现水平及竖直方向的移动;
55.当横向切割件12与竖向切割件11转动设置,其中横向切割件12在水平面内转动设置的话,横向切割件12能够以水平面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,避免碰撞,使得对绿化隔离带的修剪更加安全;
56.当横向切割件12与竖向切割件11转动设置,其中横向切割件12在竖直面内转动设置的话,横向切割件12能够以竖直面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,通常从“l”形转动为上下竖直且平行分布,避免碰撞障碍物,使得对绿化隔离带的修剪更加安全,相对于横向切割件12水平转动避让的情况,能够更近的将横向切割件12
恢复成横向切割状态,更快的恢复避让之后的修剪。
57.在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有限位导向组件3,限位导向组件3设置为以下几种形式之一:
58.限位导向组件3包括限位导向轮31,两组限位导向轮31夹设在护栏横栏的内外两侧;
59.限位导向组件3包括限位滑槽32,限位滑槽32以护栏横栏为轨;
60.限位导向组件3包括距离传感器,距离传感器感应与护栏的间距;
61.限位导向组件3包括gps导航,通过gps导航规划行进路线。
62.当通过限位导向轮和限位滑槽进行限位导向,为方便与护栏横栏的滑动连接,可采用线性驱动件对限位导向轮和限位滑槽进行升降。
63.通过本实施例的上述可能的实施方式,修剪机在移动修剪的过程中如果偏离修剪轨道,越过邻近的公路实线,则有可能和高速行驶的车辆发生碰撞,造成恶劣的交通事故,因此设置限位导向组件3,保证移动小车10沿着绿化隔离带侧面进行移动能够大幅提高移动小车10的定向行驶能力,减少交通事故发生,提高移动修剪的安全性;其中通过设置两组限位导向轮31夹设在护栏横栏的内外两侧或设置限位滑槽32以护栏横栏为轨,都能够使移动小车10行驶时以护栏为标准行驶,且由于导向轮或限位滑槽32在水平方向的限位作用,也大幅提高了移动小车10的安全行驶性能;其中,除了硬件类的限位导向组件3外,还可使用距离传感器、gps导航、雷达、电子围栏等形式限制移动小车10行驶在相邻的公路实线内。
64.在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有割草组件4,割草组件4包括切割刀具42和设置于移动小车10处的伸缩件41,切割刀具42经伸缩件41伸缩对绿化隔离带底部进行修剪。
65.通过本实施例的上述可能的实施方式,割草组件4设置为切割刀具42和伸缩件41,伸缩件41的固定端与移动小车10固定连接,移动端与切割刀具42连接,伸缩件41的设置形式可以为多级伸缩臂(参见吊机的伸缩臂),切割刀具42为通过电机带动旋转的带刃刀片(如切割机、割草机的刀片),割草组件4能够对绿化隔离带的下侧进行修剪,减少下侧植物和草向公路伸出,是对绿化隔离带上侧及两侧修剪后的补充修剪,能够减少因下侧植物和草伸向公路阻碍交通产生的交通事故,从而提高了行车安全;其中,针对割草组件4割下的草,设有用于收集断草及枝叶的的收集装置,收集装置与收集组件5的技术特征相同,同样设置引风机、外扩形收集口、收集管、收集箱、出风口和至少一层过滤网,但收集装置的外扩形收集口吸力范围覆盖切割刀具42修剪处;另也可以是在原有收集组件5的基础上,在收集箱54上额外设置一个收集管53和吸力范围覆盖切割刀具的外扩形收集口52,即时进行断草和枝叶收集,避免人工二次清扫,能够减少断草、枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低对行驶车辆的影响和行驶车辆发生事故的概率。
66.如图5所示,在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有收集组件5,收集组件5包括引风机51、外扩形收集口52、收集管53、收集箱54、出风口55和至少一层过滤网56,外扩形收集口52设置在竖向收割件侧面,收集管53和出风口55均连通设置在收集箱54上,引风机51和过滤网56均设置于收集箱54内,风顺次穿过外扩形收集口52、收集管53、收集箱54、过滤网56和出风口55。
67.通过本实施例的上述可能的实施方式,设置收集组件5能够将修剪后的枝叶进行
收集,减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率;其中,具体通过引风机51提供吸力,将经修剪组件1修剪后的枝叶顺次从外扩形收集口52、收集管53吸到收集箱54中,通过过滤网56截留住。
68.在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有粉碎组件6,粉碎组件6包括设置在收集箱54内的至少一个粉碎刀具61。
69.通过本实施例的上述可能的实施方式,通过在收集箱54中设置粉碎刀具61,从而能够将收集到收集箱54中的枝叶进行粉碎处理,为了粉碎的更彻底,可设置多把粉碎刀具61,粉碎刀具61可采用豆浆机的刀头,并经电机带动转动,收集箱54中枝叶粉碎后占得位置更小,收集的更多,并且配合施肥组件7,能够将粉碎后的枝叶作为植物肥输送到绿化隔离带下方,即时进行枝叶处理,避免人工二次清扫,使得绿化隔离带内的植物营养好,长得致密,减少因植物稀疏挡不住对面道路灯光引起的交通事故,也减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率。
70.在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有施肥组件7,施肥组件7包括排风机71和连通设置在收集箱54处的排风口72,排风机71将收集箱54内的枝叶从排风口72排出。
71.通过本实施例的上述可能的实施方式,能够将粉碎后的枝叶作为植物肥输送到绿化隔离带下方,即时进行枝叶处理,避免人工二次清扫,使得绿化隔离带内的植物营养好,长得致密,减少因植物稀疏挡不住对面道路灯光引起的交通事故,也减少枝叶因大风、车辆高速行驶产生的气流刮到公路上,降低影响车辆行驶甚至造成行驶车辆发生事故的概率,收集组件5、粉碎组件6和施肥组件7的配合使用,使得养护工作效率大幅提升,减少了二次清扫及养护的作业。
72.在本实施例的一种可能的实施方式中,伸缩件41的设置形式为多级伸缩臂或多级旋转臂。
73.通过本实施例的上述可能的实施方式,伸缩件41的设置形式为多级伸缩臂(参见吊机的伸缩臂),也可以是多级旋转臂(参见工业机器人的多级旋转手臂)多级旋转臂的旋转关节处采用舵机或电机等回转驱动件带动转动。
74.如图6所示,在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有避让组件8,避让组件8包括图像采集模块81、数据分析模块82和控制模块83,图像采集模块81可设置为工业相机或摄像头,不断对绿化隔离带前方拍摄,拍摄到的图像由数据分析模块82对比识别是否存在障碍物,控制模块83与单侧修剪机100所有可控的元器件连接,数据分析模块82和控制模块83可设置为单片机、plc控制器,控制模块83根据数据分析模块82的分析结果控制线性驱动件21或旋转驱动件22带动竖向切割件11或横向切割件12动作,实现障碍物的避让。
75.通过本实施例的上述可能的实施方式,避让组件8的存在可以判断横向切割件12和竖向切割件11的前方是否有障碍物,从而实现横向切割件12和竖向切割件11的避让;其中竖向切割件11被两个垂直设置的线性驱动件21驱动实现水平及竖直方向的移动,当横向切割件12与竖向切割件11固定连接时,则横向切割件12同竖向切割件11一起被两个垂直设置的线性驱动件21驱动实现水平及竖直方向的移动;当横向切割件12与竖向切割件11转动设置,其中横向切割件12在水平面内转动设置的话,横向切割件12能够以水平面内转动的
形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,避免碰撞,使得对绿化隔离带的修剪更加安全;当横向切割件12与竖向切割件11转动设置,其中横向切割件12在竖直面内转动设置的话,横向切割件12能够以竖直面内转动的形式躲避绿化隔离带中如灯柱、标志牌之类的障碍物,通常从“l”形转动为上下平行分布,避免碰撞障碍物,使得对绿化隔离带的修剪更加安全,相对于横向切割件12水平转动避让的情况,能够更近的将横向切割件12恢复成横向切割状态,更快的恢复避让之后的修剪;其中,避让组件8控制横向切割件12和竖向切割件11进行避让操作时,横向切割件12和竖向切割件11均不超过邻近公路实线设置。
76.在本实施例的一种可能的实施方式中,每台单侧修剪机100还设有远程控制组件9,远程控制组件9包括远程显示控制一体器91和两个传递信号的无线信号收发器92,无线信号收发器92和图像采集模块81、数据分析模块82和控制模块83、远程显示控制一体器91信号连接,远程显示控制一体器91接收无线信号收发器92传来的图像采集模块81的画面数据,操作人员通过远程显示控制一体器91发送操作信号给无线信号收发器92,无线信号收发器92将操作指令传递给控制模块83,控制模块83根据操作指令控制相应的可控的元器件进行动作。
77.通过本实施例的上述可能的实施方式,如此设置的目的是实现远程无人操控,远程无人操控由于不需要人员在现场作业,因此出现交通事故造成人员伤亡的概率被降到极低;其中无线信号收发器92可以为蓝牙信号好收发器、wifi信号好收发器、无线电信号好收发器、移动网络信号好收发器等,其中远程显示控制一体器91可以看作是具有信号输入设备及显示设备的装置,如显示器配鼠标键盘,如有必要加上电脑主机等处理器,其中可控的元器件是指前述提到的:带动力的移动小车10、竖向切割件11、修剪方位改动组件2、线性驱动件21、旋转驱动件22、伸缩件41、切割刀具42、引风机51、粉碎刀具61、排风机71、水泵等提到的电动、气动的可控元器件。
78.两台单侧修剪机100的两个竖向切割件11处还设置有卡扣,从而使两台单侧修剪机相对连接。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。