1.本实用新型涉及生产线上的抓取装置,尤其涉及用于预制构件生产线的机械抓手。
背景技术:
2.小型预制构件从纯人工生产转化为生产线生产是未来发展的必然趋势,在整条生产线的铺设中,对预制构件模具的抓取是必不可少的工艺流程。因此,在整条生产线上必然需要设置预制构件模具的抓取装置,以满足生产线自动生产的需求。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种用于预制构件生产线上抓取预制构件的抓取装置。
4.为了解决上述技术问题,本方案的用于预制构件生产线的机械抓手,包括支撑座,所述支撑座上设置有滑台框架,其特征在于:所述滑台框架内设置有主导轨,所述主导轨上设置有滑台,所述滑台上垂直设置有提升臂,所述提升臂可以相对滑台上下移动,所述提升臂的底端设置有抓手。
5.上述技术方案的进一步优化,所述主导轨和滑台框架之间设置有加强梁。
6.上述技术方案的进一步优化,所述抓手包括平行设置的滑行轨道,所述滑行轨道中部通过纵向固定梁固定连接,所述滑行轨道和纵向固定上侧覆盖有连接板,所述连接板固定在提升臂底端,所述滑行轨道之间还设置有纵向滑轨,所述纵向滑轨设置在纵向固定梁外侧,纵向滑轨可在滑行轨道上滑动,纵向滑轨中部连接有气缸,所述气缸的另一端固定连接有抓把。
7.上述技术方案的进一步优化,所述提升臂与滑台之间通过传动齿轮连接固定。
8.上述技术方案的进一步优化,所述支撑座由四个矩形设置的支撑腿组成。
9.本方案的用于预制构件生产线的机械抓手可以设置在预制构件生产线上的输送线上,通过抓手将预制构件模具抓取,再通过提升臂使预制构件模具脱离输送线,再通过滑台和主导轨将预制构件模具搬运至堆放垛上,自动完成对预制构件模具的搬运。
附图说明
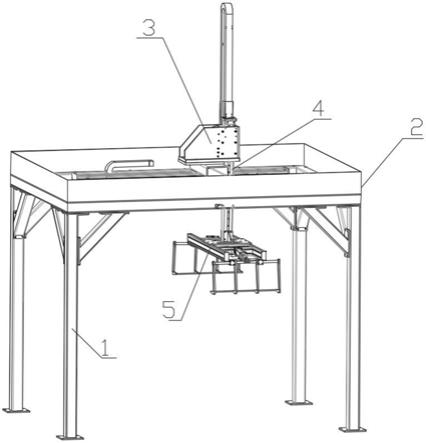
10.图1为本方案机械抓手立体结构图。
11.图2为本方案机械抓手主视结构图。
12.图3为本方案机械抓手仰视结构图。
具体实施方式
13.参见图1至3,本方案的用于预制构件生产线的机械抓手,由四个呈矩形放置的支撑腿1组成支撑座。所述支撑腿的顶部焊接有滑台框架2,支撑腿1和滑台框架2之间安装有
固定肘板11,所述滑台框架2内焊接有平行设置的主导轨21,主导轨21和滑台框架2之间通过加强梁22固定加强,加强梁22和主导轨21。所述主导轨21上安装有滑台3,滑台3可以在主导轨21上滑动。滑台3上安装有垂直设置的提升臂4,提升臂4和支撑腿1平行设置。提升臂4可以相对滑台3上下移动。提升臂的底端垂直固定有连接板41,连接板41固定在机械抓手5上。
14.机械抓手5包括平行设置滑行轨道51,所述滑行轨道51中部设置有纵向固定梁52,纵向固定梁52与滑行轨道51之间垂直焊接固定。滑行轨道51与纵向固定梁52围成的区域被连接板41覆盖固定。纵向固定梁52外侧均设置有纵向滑轨53,纵向滑轨53和纵向固定梁52平行设置,纵向滑轨53可在滑行轨道51上滑动。纵向滑轨53中部固定有气缸54,气缸54另一端安装有抓把55,抓把55下侧设有弯曲部。
15.预制构件模具的运输输送线设置在滑台框架2下方,抓把55通过纵向滑轨53调整适当的夹距,通过气缸54控制抓把55的夹持力度将预制构件模具抓起;调整提升臂4将预制构件模具拎起,再调整滑台3在主导轨21上的位置将预制构件模具搬离输送线,放置于堆放垛。如果需要将堆放垛的预制构件模具搬至输送线,采用相反的操作即可。
技术特征:
1.用于预制构件生产线的机械抓手,包括支撑座,所述支撑座上设置有滑台框架,其特征在于:所述滑台框架内设置有主导轨,所述主导轨上设置有滑台,所述滑台上垂直设置有提升臂,所述提升臂可以相对滑台上下移动,所述提升臂的底端设置有抓手。2.如权利要求1所述的用于预制构件生产线的机械抓手,其特征在于:所述主导轨和滑台框架之间设置有加强梁。3.如权利要求1所述的用于预制构件生产线的机械抓手,其特征在于:所述抓手包括平行设置的滑行轨道,所述滑行轨道中部通过纵向固定梁固定连接,所述滑行轨道和纵向固定上侧覆盖有连接板,所述连接板固定在提升臂底端,所述滑行轨道之间还设置有纵向滑轨,所述纵向滑轨设置在纵向固定梁外侧,纵向滑轨可在滑行轨道上滑动,纵向滑轨中部连接有气缸,所述气缸的另一端固定连接有抓把。4.如权利要求1所述的用于预制构件生产线的机械抓手,其特征在于:所述提升臂与滑台之间通过传动齿轮连接固定。5.如权利要求1所述的用于预制构件生产线的机械抓手,其特征在于:所述支撑座由四个矩形设置的支撑腿组成。
技术总结
本实用新型公开了用于预制构件生产线的机械抓手,包括支撑座,所述支撑座上设置有滑台框架,所述滑台框架内设置有主导轨,所述主导轨上设置有滑台,所述滑台上垂直设置有提升臂,所述提升臂可以相对滑台上下移动,所述提升臂的底端设置有抓手。该装置可以设置在预制构件生产线上的输送线上,通过抓手将预制构件模具抓取,再通过提升臂使预制构件模具脱离输送带,再通过滑台和主导轨将预制构件模具搬运至堆放垛或搬运至输送线上,自动完成对预制构件的搬运。件的搬运。件的搬运。
技术研发人员:刘培艳 刘海鹏
受保护的技术使用者:南通齐鑫电气自动化科技有限公司
技术研发日:2021.01.28
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。