1.本实用新型涉及一种拐杖,具体是一种高安全性能的智能拐杖。
背景技术:
2.拐杖是一种重要的医疗康复辅助用具,分手杖、肘杖、腋杖,其中手杖主要用于轻度需要,例如老年人或登山者,手杖不属于残疾人用品,肘杖属于中度下肢残疾人用品。腋拐杖是下肢重度残疾者的必需品,多数下肢残疾人不得不终身使用腋杖。
3.目前,随着科技的进步,拐杖也逐渐智能化,但是现有的智能拐杖具有以下缺点,即地面较为光滑时,容易发生滑倒现象,严重可能导致使用者摔伤,因此亟需改善。
技术实现要素:
4.针对上述现有技术的不足,本实用新型要解决的技术问题是提供一种高安全性能的智能拐杖。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种高安全性能的智能拐杖,包括支撑杖,所述支撑杖上安装有控制终端,支撑杖的上端固定连接有扶手,所述扶手套设有防滑套,所述支撑杖的下端固定连接有支撑盒,支撑杖的中部两端套设有安装于支撑杖上且对称分布的环形气囊,所述环形气囊连通有支撑杖设置的连接气道,连接气道嵌套并固定连接有延伸至支撑盒内的出气管,出气管连接有气体发生器,气体发生器外侧贴合有安装于支撑盒内壁上的环形压力传感器,所述支撑盒的底板滑动连接有若干个活动垫块,所述活动垫块固定连接有柔性防滑垫,活动垫块与气体发生器之间设置有支撑挤压机构。
7.作为本实用新型进一步的方案:所述支撑挤压机构包括与活动垫块固定连接的挤压杆,挤压杆贯穿有与支撑盒内壁固定连接的固定支撑板,挤压杆的上端固定连接有贴合于气体发生器底部的挤压板,挤压杆的杆体贯穿并固定连接有限位板,限位板固定连接有贴合于固定支撑板底部的柔性垫,所述挤压杆位于固定支撑板与挤压板之间的杆体套设有弹性件。
8.作为本实用新型进一步的方案:所述弹性件为弹簧。
9.作为本实用新型再进一步的方案:所述支撑杖设置有通过连接气道排气的快速排气机构。
10.作为本实用新型再进一步的方案:所述快速排气机构包括使连接气道与支撑杖外连通的螺纹孔,螺纹孔螺纹连接有排气螺栓,排气螺栓的杆体设置有排气槽与螺纹孔连通,排气螺栓的杆体设有对称分布的排气孔与排气槽连通。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型结构巧妙,可以自动在将要滑倒时,快速对环形气囊充气,从而避免使用者摔伤;当使用者抓取防滑套进行使用时,柔性防滑垫接触地面,当发生滑倒现象时,只有局部的几个所述柔性防滑垫与地面保持贴合,此时其他的所述柔性防滑垫受到的压力较
小,此时柔性防滑垫通过活动垫块、挤压杆、挤压板对所述气体发生器的压力产生变化,气体发生器底部受到的压力产生了变化从而导致气体发生器产生轻微偏移,此时气体发生器对环形压力传感器的压力大小布局发生改变,达到预设值时,所述环形压力传感器通过控制终端使气体发生器开始迅速放气,气体通过出气管进入到连接气道内并进入到环形气囊内,环形气囊快速膨胀,从而对使用者进行防护,使用者在环形气囊以及支撑杖的支撑下,不会与地面发生直接碰撞解除,从而可以避免使用者受伤。
附图说明
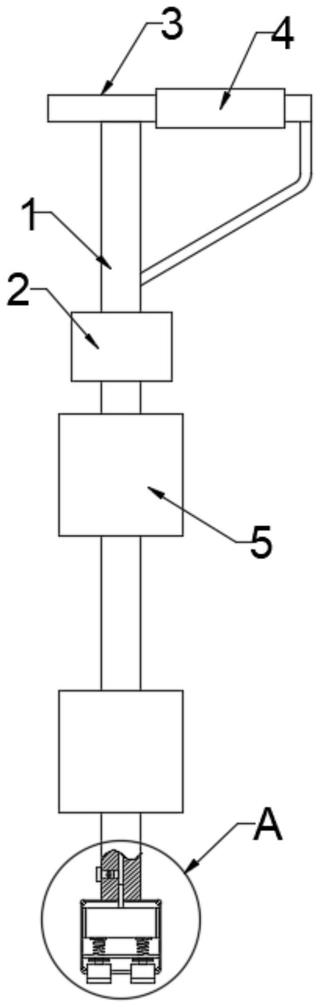
13.图1为本实用新型的结构示意图;
14.图2为本实用新型的a部分结构示意图;
15.图3为本实用新型的排气螺栓的三维示意图。
16.图中:支撑杖1、控制终端2、扶手3、防滑套4、环形气囊5、支撑盒6、活动垫块7、柔性防滑垫8、挤压杆9、固定支撑板10、限位板11、柔性垫12、挤压板13、弹性件14、气体发生器15、环形压力传感器16、出气管17、连接气道18、排气螺栓19、螺纹孔20、排气槽21、排气孔22。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.实施例1
19.请参阅图1
‑
3,一种高安全性能的智能拐杖,包括支撑杖1,所述支撑杖1上安装有控制终端2,支撑杖1的上端固定连接有扶手3,所述扶手3套设有防滑套4,所述支撑杖1的下端固定连接有支撑盒6,支撑杖1的中部两端套设有安装于支撑杖1上且对称分布的环形气囊5,所述环形气囊5连通有支撑杖1设置的连接气道18,连接气道18嵌套并固定连接有延伸至支撑盒6内的出气管17,出气管17连接有气体发生器15,气体发生器15外侧贴合有安装于支撑盒6内壁上的环形压力传感器16,所述支撑盒6的底板滑动连接有若干个活动垫块7,所述活动垫块7固定连接有柔性防滑垫8,活动垫块7与气体发生器15之间设置有支撑挤压机构,所述支撑挤压机构包括与活动垫块7固定连接的挤压杆9,挤压杆9贯穿有与支撑盒6内壁固定连接的固定支撑板10,挤压杆9的上端固定连接有贴合于气体发生器15底部的挤压板13,挤压杆9的杆体贯穿并固定连接有限位板11,限位板11固定连接有贴合于固定支撑板10底部的柔性垫12,所述挤压杆9位于固定支撑板10与挤压板13之间的杆体套设有弹性件14,所述弹性件14优选为弹簧。
20.综上所述,当使用者抓取防滑套4进行使用时,柔性防滑垫8接触地面,当发生滑倒现象时,只有局部的几个所述柔性防滑垫8与地面保持贴合,此时其他的所述柔性防滑垫8受到的压力较小,此时柔性防滑垫8通过活动垫块7、挤压杆9、挤压板13对所述气体发生器15的压力产生变化,气体发生器15底部受到的压力产生了变化从而导致气体发生器15产生轻微偏移,此时气体发生器15对环形压力传感器16的压力大小布局发生改变,达到预设值
时,所述环形压力传感器16通过控制终端2使气体发生器15开始迅速放气,气体通过出气管17进入到连接气道18内并进入到环形气囊5内,环形气囊5快速膨胀,从而对使用者进行防护,使用者在环形气囊5以及支撑杖1的支撑下,不会与地面发生直接碰撞解除,从而可以避免使用者受伤。
21.实施例2
22.本实施例在实施例1的基础上进行拓展,所述支撑杖1设置有通过连接气道18排气的快速排气机构,所述快速排气机构包括使连接气道18与支撑杖1外连通的螺纹孔20,螺纹孔20螺纹连接有排气螺栓19,排气螺栓19的杆体设置有排气槽21与螺纹孔20连通,排气螺栓19的杆体设有对称分布的排气孔22与排气槽21连通,当需要对气囊排气时,只需要通过旋转排气螺栓19从而使排气孔22暴露于支撑杖1外,即可快速排气。
23.有必要进行说明的是,本申请技术方案的用电部件,如动力机构等均与外部控制器连接,所述的外部控制器为现有技术,本申请技术方案未对其进行改进,因而不需要公开外部控制器的具体型号、电路结构等,不影响本申请技术方案的完整性。
24.对上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
技术特征:
1.一种高安全性能的智能拐杖,包括支撑杖(1),其特征在于,所述支撑杖(1)上安装有控制终端(2),支撑杖(1)的上端固定连接有扶手(3),所述扶手(3)套设有防滑套(4),所述支撑杖(1)的下端固定连接有支撑盒(6),支撑杖(1)的中部两端套设有安装于支撑杖(1)上且对称分布的环形气囊(5),所述环形气囊(5)连通有支撑杖(1)设置的连接气道(18),连接气道(18)嵌套并固定连接有延伸至支撑盒(6)内的出气管(17),出气管(17)连接有气体发生器(15),气体发生器(15)外侧贴合有安装于支撑盒(6)内壁上的环形压力传感器(16),所述支撑盒(6)的底板滑动连接有若干个活动垫块(7),所述活动垫块(7)固定连接有柔性防滑垫(8),活动垫块(7)与气体发生器(15)之间设置有支撑挤压机构。2.根据权利要求1所述的一种高安全性能的智能拐杖,其特征在于,所述支撑挤压机构包括与活动垫块(7)固定连接的挤压杆(9),挤压杆(9)贯穿有与支撑盒(6)内壁固定连接的固定支撑板(10),挤压杆(9)的上端固定连接有贴合于气体发生器(15)底部的挤压板(13),挤压杆(9)的杆体贯穿并固定连接有限位板(11),限位板(11)固定连接有贴合于固定支撑板(10)底部的柔性垫(12),所述挤压杆(9)位于固定支撑板(10)与挤压板(13)之间的杆体套设有弹性件(14)。3.根据权利要求2所述的一种高安全性能的智能拐杖,其特征在于,所述弹性件(14)为弹簧。4.根据权利要求1所述的一种高安全性能的智能拐杖,其特征在于,所述支撑杖(1)设置有通过连接气道(18)排气的快速排气机构。5.根据权利要求4所述的一种高安全性能的智能拐杖,其特征在于,所述快速排气机构包括使连接气道(18)与支撑杖(1)外连通的螺纹孔(20),螺纹孔(20)螺纹连接有排气螺栓(19),排气螺栓(19)的杆体设置有排气槽(21)与螺纹孔(20)连通,排气螺栓(19)的杆体设有对称分布的排气孔(22)与排气槽(21)连通。
技术总结
本实用新型涉及一种拐杖,公开了一种高安全性能的智能拐杖,包括支撑杖,所述支撑杖上安装有控制终端,支撑杖的上端固定连接有扶手,支撑杖的下端固定连接有支撑盒,支撑杖的中部两端套设有安装于支撑杖上且对称分布的环形气囊,所述环形气囊连通有支撑杖设置的柔性防滑垫,柔性防滑垫嵌套并固定连接有延伸至支撑盒内的出气管,出气管连接有气体发生器,气体发生器外侧贴合有安装于挤压杆内壁上的环形压力传感器,所述支撑盒的底板滑动连接有若干个活动垫块,所述活动垫块固定连接有柔性防滑垫,活动垫块与气体发生器之间设置有支撑挤压机构。本实用新型结构巧妙,可以自动在将要滑倒时,快速对环形气囊充气,从而避免使用者摔伤。者摔伤。者摔伤。
技术研发人员:张学燕 高玮
受保护的技术使用者:泰山职业技术学院
技术研发日:2021.01.28
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。