1.本实用新型涉及离合摩擦片技术领域,特别是涉及一种离合摩擦片自动组料压合设备。
背景技术:
2.离合器是借助两块表面平整的离合摩擦片,经过轴向压紧和松开来进行传动力的一种机构。它的两块离合器片轴向压力愈大,所产生的摩擦力也就愈大,传递的运行也就越平稳正常,在摩托车的运行中起到至关重要的作用。
3.离合摩擦片由两片摩擦片中夹一片骨架压合而成,通常需要人工组料将摩擦片和骨架叠在一起,再放入压机中压合,人工操作效率较低,且摩擦片材质及车间内的噪音污染对操作人员的身体健康有一定影响。
技术实现要素:
4.针对上述存在的技术问题,本实用新型的目的是:提出了一种离合摩擦片自动组料压合设备,免去人工操作,实现自动组料压合功能。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种离合摩擦片自动组料压合设备,包括全自动分层组料装置和硫化压机,所述全自动分层组料装置和硫化压机之间设置有用于转移物料的机器人;
7.所述全自动分层组料装置包括排成一列的第一物料存放台、第二物料存放台和组料台,所述第一物料存放台、第二物料存放台和组料台的上方设置有轨道,所述轨道上设置有物料转移装置,所述物料转移装置在一第一电缸的驱动下沿着轨道在第一物料存放台、第二物料存放台和组料台之间往复滑动;所述物料转移装置包括上安装板、下安装板和第二电缸,所述上安装板与轨道滑动连接,所述第二电缸包括缸体和与缸体滑动连接的活塞杆,所述缸体与上安装板相连,所述活塞杆与下安装板相连,所述下安装板在第二电缸的驱动下上下滑动,所述下安装板上设置有用于吸取物料的真空吸头;
8.所述机器人的执行端设置有取料装置,所述取料装置包括取料单元,所述取料单元包括固定盘,所述固定盘上设置有主齿轮,所述主齿轮由一旋转气缸驱动转动,所述主齿轮的周围设置有若干与主齿轮啮合的副齿轮,所述副齿轮上设置有偏心的夹持块,所述夹持块包括与副齿轮固定连接的安装端和向外延伸的凸出端,所述凸出端远离安装端的一侧设置有用于托举物料的托板。
9.优选的是,所述第一物料存放台包括固定板和升降板,所述升降板相对固定板上下滑动连接,所述固定板上设置有若干圆柱筒,所述升降板上设置有可供圆柱筒通过的开口。
10.优选的是,所述圆柱筒的顶部设置有用于感应物料到位的传感器。
11.优选的是,所述固定板的下方设置有升降电机,所述升降电机的输出端设置有副升降板,所述副升降板上设置有若干第一导杆,所述第一导杆穿过固定板与升降板固定连
接。
12.优选的是,所述固定板上阵列有3*4个圆柱筒,所述组料台上对应圆柱筒阵列有3*4个组料位,所述取料装置上对应组料位阵列有3*4个取料单元,所述硫化压机上对应取料单元设置有上模和下模。
13.优选的是,所述取料装置包括安装板,所述取料单元安装于安装板上,所述安装板上设置有遮盖取料单元的旋转气缸的护罩。
14.优选的是,所述取料装置的一侧设置有雾化喷嘴,所述雾化喷嘴与一气动隔膜泵相连,用于喷涂脱模剂。
15.优选的是,所述全自动分层组料装置远离硫化压机的一侧设置有传送带装置。
16.优选的是,所述取料装置上设置有调试销,所述组料台对应调试销设置有定位孔。
17.优选的是,所述真空吸头与一气源相连,所述气源与真空吸头之间依次设置有气罐、电磁阀、真空发生器和负压检测开关。
18.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
19.本实用新型离合摩擦片自动组料压合设备通过机器人在全自动分层组料装置和硫化压机之间转移物料,实现了将制成离合摩擦片的摩擦片和骨架进行自动组料并压合的功能,自动化操作提高了离合摩擦片的制造效率和安全性,改善了工作环境;全自动分层组料装置包括排成一列的第一物料存放台、第二物料存放台和组料台,其上设置有轨道,轨道上的物料转移装置在第一物料存放台、第二物料存放台和组料台之间往复滑动,抓取第一物料存放台和第二物料存放台上的摩擦片和骨架放置到组料台上;机器人的执行端设置有取料装置,取料装置从组料台上抓取堆叠好的摩擦片和骨架放入硫化压机中压合成离合摩擦片,再将离合摩擦片转移到传送带装置上输出,高效流畅地完成了离合摩擦片的制造。
附图说明
20.下面结合附图对本实用新型技术方案作进一步说明:
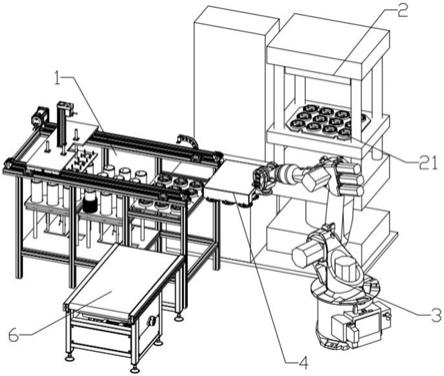
21.附图1为本实用新型离合摩擦片自动组料压合设备的立体图;
22.附图2为本实用新型离合摩擦片自动组料压合设备的全自动分层组料装置的立体图;
23.附图3为本实用新型离合摩擦片自动组料压合设备的物料转移装置及轨道的立体图;
24.附图4为本实用新型离合摩擦片自动组料压合设备的第一物料存放台和第二物料存放台的立体图;
25.附图5为本实用新型离合摩擦片自动组料压合设备的第一物料存放台和第二物料存放台的另一视角的立体图;
26.附图6为本实用新型离合摩擦片自动组料压合设备的取料单元的立体图;
27.附图7为本实用新型离合摩擦片自动组料压合设备的取料单元的立体图;
28.附图8为本实用新型离合摩擦片自动组料压合设备的取料单元省略部分结构的立体图;
29.附图9为本实用新型离合摩擦片自动组料压合设备的取料单元的立体图;
30.附图10为本实用新型离合摩擦片自动组料压合设备的取料单元的收拢时的仰视
图;
31.附图11为本实用新型离合摩擦片自动组料压合设备的取料单元的打开时的仰视图
32.附图12为本实用新型离合摩擦片自动组料压合设备的取料装置的立体图;
33.附图13为本实用新型离合摩擦片自动组料压合设备的机器人及取料装置的立体图;
34.附图14为本实用新型离合摩擦片自动组料压合设备的掉料检测的示意图;
35.附图15为本实用新型离合摩擦片自动组料压合设备的掉料检测的流程图。
36.其中:1、全自动分层组料装置;11、第一物料存放台;111、固定板;112、升降板;1121、开口;113、圆柱筒;114、传感器;115、副升降板;116、第一导杆;117、直线轴承;118、第二导杆;12、第二物料存放台;13、组料台;131、组料位;132、定位孔;14、轨道;15、物料转移装置;151、上安装板;152、下安装板;153、第二电缸;1531、缸体;1532、活塞杆;154、真空吸头;16、第一电缸;2、硫化压机;21、下模;3、机器人;4、取料装置;41、固定盘;411、安装孔;42、主齿轮;43、旋转气缸;44、副齿轮;45、夹持块;451、安装端;452、凸出端;453、托板;4531、斜面;46、螺栓;47、螺母;48、无油衬套;49、安装板;50、护罩;5、雾化喷嘴;6、传送带装置;7、调试销;9、摩擦片;10、骨架;81、气源;82、气罐;83、电磁阀;84、真空发生器;85、负压检测开关。
具体实施方式
37.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
38.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个原件上或可能同时存在居中元件。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
39.另外,还需要说明的是,本实用新型实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。以下结合具体实施例对本实用新型的实现进行详细的描述。
40.如附图1所示为本实用新型一种离合摩擦片自动组料压合设备,包括全自动分层组料装置1和硫化压机2,全自动分层组料装置1和硫化压机2之间设置有用于转移物料的机器人3。
41.如附图2所示,全自动分层组料装置1包括排成一列的第一物料存放台11、第二物料存放台12和组料台13。一片离合摩擦片由一片骨架10和两片置于骨架10两侧的摩擦片9压合而成,第一物料存放台11用于堆放骨架10,第二物料存放台12用于堆放摩擦片9,组料台13用于按顺序堆叠摩擦片9、骨架10和摩擦片9,以便后续的压合加工。
42.第一物料存放台11、第二物料存放台12和组料台13的上方安装有轨道14,轨道14上安装有物料转移装置15,物料转移装置15在一第一电缸16的驱动下沿着轨道14在第一物料存放台11、第二物料存放台12和组料台13之间往复滑动,并分别抓取摩擦片9和骨架10放置在组料台13上。
43.如附图3所示,物料转移装置15包括上安装板151、下安装板152和第二电缸153。上安装板151与轨道14水平滑动连接,第二电缸153包括缸体1531和与缸体1531上下滑动连接的活塞杆1532,缸体1531与上安装板151固定相连,活塞杆1532与下安装板152相连,下安装板152在第二电缸153的驱动下上下滑动。下安装板152上安装有4根竖直的第二导杆118,第二导杆118与上安装板151上下滑动连接。下安装板152上安装有用于吸取物料的真空吸头154。
44.如附图4所示,第一物料存放台11包括固定板111和升降板112,升降板112相对固定板111上下滑动连接。固定板111上按3*4阵列有12个圆柱筒113,环形的骨架10套在圆柱筒113上,待物料转移装置15从上方经过时抓取。第二物料存放台12的结构与第一物料存放台11相同,环形的摩擦片9套在第二物料存放台12上的圆柱筒113上等待取料。升降板112上开有可供圆柱筒113通过的开口1121,套在圆柱筒113上的骨架10由升降板112承载,随升降板112上下移动。固定板111的下方安装有升降电机,升降电机的输出端与副升降板115相连,副升降板115上安装有若干第一导杆116,第一导杆116穿过固定板111与升降板112固定连接,使升降板112的移动更加平稳。如附图5所示,第一导杆116与固定板111之间安装有直线轴承117,使升降板112运动更加顺畅。
45.圆柱筒113的顶部安装有用于感应物料到位的传感器114,当升降板112上升时,升降板112上承载的骨架10或摩擦片9同步向上移动,传感器114感应到最上方的骨架10或摩擦片9,传递信号使升降板112停止,物料转移装置15上的真空吸头154即吸取最上方的骨架10或摩擦片9将其转移到组料台13上。组料台13对应圆柱筒113的排列位置设置有12个组料位131。
46.如附图14所示,真空吸头154与一气源81相连,气源81与真空吸头154之间依次连接有气罐82、电磁阀83、真空发生器84和负压检测开关85,实现了掉料检测功能。气罐82用于储存气量,解决系统内短时间里可能出现的用气量大于供气量的矛盾,或在出现故障或其它突发性事件时作临时急用,负压检测开关85用于检测真空吸头154处的气压。如附图15所示,真空吸头154吸取物料时,电磁阀83通电,气源81供气,真空吸头154吸取骨架10或摩擦片9,当负压检测开关85检测到气压信号正常时物料转移装置15正常运行转移物料,当负压检测开关85检测到信号不正常时进行掉料报警,以免转移到组料台13上的骨架10或摩擦片9有缺少导致压合得到的产品无法使用,改善了设备性能,降低了产品的报废率。
47.机器人3的执行端安装有取料装置4,如附图6、附图7所示,其包括取料单元,该取料单元包括固定盘41,固定盘41的中央安装有主齿轮42,主齿轮42由一旋转气缸43驱动转动。主齿轮42位于固定盘41的一侧,旋转气缸43位于固定盘41背向主齿轮42的一侧。主齿轮41的周围安装有4个与主齿轮41啮合的副齿轮44,副齿轮44上安装有偏心的夹持块45。夹持块45包括与副齿轮44固定连接的安装端451和从安装端451向远离主齿轮42的外侧延伸的凸出端452,凸出端452远离安装端451的一侧形成有用于托举摩擦片9的托板453。主齿轮42转动时,均匀环绕在主齿轮42周围的副齿轮44同时转动,与副齿轮44固定连接的夹持块45同步旋转,夹持块45的凸出端靠近或远离主齿轮42,形成收拢或张开的效果。如附图10所示,夹持块45向内收拢时,4个夹持块45的外轮廓尺寸小于摩擦片9的内径,当主齿轮42顺时针旋转时,如附图11所示,与副齿轮44同步逆时针转动的夹持块45向外打开,夹持块45的凸出端452撑开接近摩擦片9的内侧,凸出端452上的托板453托住摩擦片9的底部,避免摩擦片
9掉落,如附图6所示。
48.安装端451和凸出端452的外轮廓面平滑连接,使夹持块45打开过程中与摩擦片9的接触过渡平缓,减少冲击。
49.如附图9所示,托板453的上表面上形成有向远离凸出端452的方向向下倾斜的斜面4531,使托板453的边缘更薄。未被抓取的摩擦片9大量堆叠成柱状,斜面4531的设置使得托板453可以更轻易插入上下两片摩擦片9的间隙中使其分离,便于抓取摩擦片9,避免过度紧绷将摩擦片9撑变形,也可以提高摩擦片9抓取的精确度,一次只抓取一片摩擦片9。
50.如附图8所示,固定盘41上对应副齿轮44开设有安装孔411,螺栓46从下方穿过副齿轮44并穿过安装孔411和螺母47锁紧将副齿轮44安装在固定盘41上。副齿轮44与螺栓46之间安装有无油衬套48,使副齿轮44转动更加顺畅。副齿轮44的下端形成有外轮廓呈圆形的连接部441,夹持块45的安装端451与连接部441过盈配合或通过其他连接方式将夹持块45固定在副齿轮44上。
51.如附图12所示,取料装置4还包括安装板49,取料单元阵列安装于安装板49上,便于同时抓取多片摩擦片9,提高工作效率。安装板49上设置有遮盖取料单元的旋转气缸43的护罩50,避免灰尘进入。机器人3移动取料装置4从全自动分层组料装置1的组料台13上抓取物料,取料装置4上对应组料位131阵列有3*4个取料单元,硫化压机2上对应取料单元安装有上模和下模21,机器人3将抓取的物料置于下模21上进行压合。取料装置4上安装有调试销7,组料台13对应调试销7开有定位孔132。取料装置4由机器人3移动到组料台13上方并向下移动时调试销7插入定位孔132中,使取料位置更加精准,避免抓取过程产生偏移出错。机器人3为库卡六轴机器人。取料装置4的一侧安装有雾化喷嘴5,雾化喷嘴5与一气动隔膜泵相连,用于喷涂脱模剂。
52.全自动分层组料装置1远离硫化压机2的一侧安装有传送带装置6,用于转移压合完成的离合摩擦片。
53.工作时,第一物料存放台11上放置有12摞数量相等的骨架10,第二物料存放台12上放置有12摞数量相等的摩擦片9,骨架10和摩擦片9分别套设在圆柱筒113上,并分别由下方的升降板112承载;物料转移装置15在第一电缸16的驱动下沿着轨道14移动到第二物料存放台12上方,下安装板152在第二电缸153的驱动下向下移动靠近摩擦片9,下安装板152上的真空吸头154吸取最上方的摩擦片9,物料转移装置15向组料台13移动,将吸取的12片摩擦片9放置到对应的12个组料位131上;接着物料转移装置15移动到第一物料存放台11上方,吸取12片骨架10放置到组料台13上;第二物料存放台12最上方的摩擦片9被取走后升降板112向上移动,当传感器114感应到摩擦片9向上移动至圆柱筒113顶部时升降板112静止,使摩擦片9位于便于真空吸头154吸取的位置,物料转移装置15再次吸取12片摩擦片9置于组料台13上,此时,每个组料位131上从上至下依次堆叠有一片摩擦片9、一片骨架10和一片摩擦片9,离合摩擦片的组料完成。接着机器人3移动取料装置4来到组料台13的上方,旋转气缸43驱动主齿轮42顺时针旋转,与主齿轮42啮合的副齿轮44逆时针转动,与副齿轮44固定连接的夹持块45向外打开,夹持块45的凸出端452撑开接近摩擦片9的内侧,凸出端452上的托板453托住堆叠在一起的摩擦片9和骨架10的底部,抓取组合的物料;机器人3将取料装置4移动到硫化压机2处,在取料装置4在下模21上方移动的过程中,取料装置4侧面的雾化喷嘴5向下模21喷出脱模剂,便于压合完成后进行脱模;取料装置4的主齿轮42逆时针转动
时,夹持块45向内收拢,摩擦片9和骨架10落下至下模21上,取料装置4退出,硫化压机2将摩擦片9、骨架10和摩擦片9压合成离合摩擦片,机器人3将离合摩擦片取走置于传送带装置6上转移至他处。
54.本实施例离合摩擦片自动组料压合设备实现了将制成离合摩擦片的摩擦片和骨架进行自动组料并压合的功能,自动化操作提高了离合摩擦片的制造效率和安全性,改善了工作环境,高效流畅地完成了离合摩擦片的制造。
55.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。