1.本发明涉及医疗器械技术领域,具体涉及旋转伸缩支臂结构及手术机器人。
背景技术:
2.腹腔微创手术中操作器械本身自重较大,为了避免细菌感染,操作端与前端距离长,易造成操作者腕关节负载过大,短时间使用疲劳对手术操作影响极大。在实际使用中,会采用重力平衡装置来平衡操作器械,以缓解操作器械时操作者的疲劳。但是,现有技术中的平衡装置具有操作效率较低的缺陷。
技术实现要素:
3.因此,本发明提供一种旋转伸缩支臂结构,解决或部分解决现有技术中平衡装置具有操作效率较低的问题。
4.为达到上述目的,本发明的技术方案是这样实现的:一种旋转伸缩支臂结构,包括旋转机构、支臂壳体、锁销机构、浮动机构、限位机构和锁紧机构;旋转机构能够多维度转动;支臂壳体一端与旋转机构连接,支臂壳体内形成有安装腔,锁销机构、浮动机构和限位机构均设于安装腔内;锁销机构具有与旋转机构连接、且使旋转机构位置固定的第一锁定位置;限位机构具有第二锁定位置,在第二锁定位置时,限位机构推动锁销机构移动到第一锁定位置,且限位机构与浮动机构连接,锁定浮动机构;锁紧机构的一端伸入安装腔内与限位机构连接,用于驱动限位机构切换至第二锁定位置。
5.可选地,限位机构包括两个半环形板,半环形板相对的两端分别为板连接端和板限位端,两个半环形板的两个板连接端连接,两个板限位端相对设置且形成夹持空间,两个板限位端处于相互靠近的位置时限位机构处于第二锁定位置;锁销机构包括第一锁杆,第一锁杆位于夹持空间内,限位机构切换至第二锁定位置时,两个板限位端推动第一锁杆移动,第一锁杆移动使锁销机构移动到第一锁定位置。
6.可选地,板限位端设置朝向旋转机构的导向坡面;第一锁杆的一端为杆导向端,杆导向端呈v形,且位于两个导向坡面之间;两个板限位端相互靠近移动时,导向坡面与杆导向端接触,推动第一锁杆朝向旋转机构移动。
7.可选地,锁紧机构具有第一位置和第二位置,限位机构还具有第二解锁位置,锁紧机构从第一位置切换至第二位置时,锁紧机构驱动限位机构从第二解锁位置切换至第二锁定位置;锁销机构还包括偏压件,偏压件的一端与第一锁杆抵接,另一端与支臂壳体抵接,偏压件为第一锁杆提供远离旋转机构的偏压力;锁紧机构从第二位置切换到第一位置时,偏压件驱动第一锁杆向远离旋转机构方向移动,杆导向端推动两个板限位端相互远离,使限位机构从第二锁定位置切换至第二解锁位置。
8.可选地,偏压件为压缩弹簧,压缩弹簧套设于第一锁杆。
9.可选地,两个半环形板围成筒状腔;浮动机构包括伸缩杆;伸缩杆贯穿筒状腔,第二锁定位置时,两个半环形板抱紧伸缩杆,以锁定浮动机构。
10.可选地,半环形板为环形摩擦片。
11.可选地,半环形板形成有通道;锁紧机构包括锁止旋钮和旋转杆,旋转杆一端伸入支臂壳体内,穿过通道与半环形板连接,旋转杆另一端与锁止旋钮连接;锁止旋钮旋转带动旋转杆旋转,旋转杆旋转驱动两个板限位端相互靠近。
12.可选地,通道包括限位凹槽和限位孔,限位孔一端位于板限位端的端面处,另一端位于限位凹槽的侧壁处。
13.可选地,限位凹槽设置限位孔的侧壁形成有向侧壁内凹陷的第一凹陷部和第二凹陷部,第一凹陷部的深度大于第二凹陷部的深度;旋转杆为变截面杆,包括第一段杆和两个第二段杆,第一段杆位于两个第二段杆之间,第一段杆的直径小于第二段杆的直径,第一段杆插入限位孔内,第二段杆位于限位凹槽内,第二段杆靠近第一段杆的端部设有凸起,旋转杆旋转时凸起在第一凹陷部处和第二凹陷部处移动;凸起位于第一凹陷部内,两个板限位端相互远离,凸起位于第二凹陷部内,两个板限位端相互靠近。
14.可选地,第一凹陷部和第二凹陷部均呈扇形结构,扇形结构的中部深度大于两端的深度;凸起为与第一凹陷部适配的扇形的凸起。
15.可选地,第一凹陷部和第二凹陷部均具有两个,绕限位孔的轴线呈交错设置;凸起具有两个,两个凸起相对于旋转杆的轴线镜像设置。
16.可选地,旋转机构包括旋转壳体和万向球,旋转壳体与支臂壳体连接,旋转壳体内形成有球形内腔;万向球设于球形内腔中,万向球一端的部分伸出旋转壳体用于与外部连接,万向球另一端设置有多个插接凹槽,插接凹槽适于锁销机构插入,以固定万向球。
17.可选地,插接凹槽为尖点槽。
18.可选地,锁销机构包括依次连接的第一锁杆、第二锁杆和第三锁杆:第一锁杆与限位机构连接,第一锁杆与支臂壳体的中线平行;第二锁杆弯折设置;第三锁杆位于支臂壳体的中线处,第三锁杆的端部适于插入插接凹槽内。
19.可选地,浮动机构还包括平衡件,平衡件与支臂壳体连接;伸缩杆包括相对设置的杆悬挂端和杆连接端,杆悬挂端伸出支臂壳体用于悬挂手术器械,杆连接端用于与平衡件连接,平衡件用于平衡手术器械的重力。
20.可选地,平衡件为恒力弹簧,恒力弹簧的横截面呈螺旋状结构,恒力弹簧的内圈通过第一安装轴与支臂壳体连接,恒力弹簧的外圈端部与杆连接端连接。
21.本发明的旋转伸缩支臂结构,为可以绕旋转机构自由摆动,同时能够悬吊手术器械的结构,应用于腹腔微创手术中,对手术器械的重力平衡,在转动的同时平衡悬吊手术器械,减轻手术过程中操作者的腕部负载,提高手术的稳定性。旋转伸缩支臂结构在操作时,锁紧机构驱动限位机构切换至第二锁定位置,限位机构能够推动锁销机构移动与旋转机构连接,进而固定旋转机构,限位机构还与浮动机构连接,锁定浮动机构,也即,限位机构能够同时固定旋转机构和锁定浮动机构,锁紧机构的一次动作即可实现任一位置对旋转和悬吊两个自由度锁定,具有操作效率高的优点。
22.本发明的另一目的在于提出一种手术机器人,以解决或部分解决现有手术机器人的平衡装置具有操作效率较低的问题。
23.为达到上述目的,本发明的技术方案是这样实现的:一种手术机器人,包括机座和上述的旋转伸缩支臂结构,旋转伸缩支臂结构与机
座连接。
24.手术机器人与上述的旋转伸缩支臂结构相对于现有技术所具有的优势相同,在此不再赘述。
25.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
26.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.图1为本发明的旋转伸缩支臂结构的结构示意图;图2为图1中a部分放大图的结构示意图;图3为本发明的旋转伸缩支臂结构过支臂壳体中线剖视图的结构示意图;图4为本发明的旋转伸缩支臂结构俯视图的结构示意图;图5为本发明的两个半环形板的结构示意图。
28.附图标记说明:231
‑
万向球;2311
‑
旋转壳体;2312
‑
插接凹槽;232
‑
支臂壳体;2321
‑
第一限位部;2322
‑
第二限位部;2330
‑
伸缩杆;2331
‑
杆悬挂端;2332
‑
平衡件;2333
‑
第一安装轴;2334
‑
第二安装轴;2335
‑
杆连接端;2340
‑
第一锁杆;2341
‑
偏压件;2342
‑
第二锁杆;2343
‑
第三锁杆;2344
‑
杆导向端;2345
‑
杆限位部;2350
‑
半环形板;2351
‑
导向坡面;2352
‑
限位凹槽;2353
‑
第一凹陷部;2354
‑
第二凹陷部;2355
‑
限位孔;2356
‑
板连接端;2357
‑
板限位端;2360
‑
锁止旋钮;2361
‑
旋转杆;2362
‑
第一段杆;2363
‑
第二段杆;2364
‑
凸起。
具体实施方式
29.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.现有技术中的平衡装置,采用旋钮锁定万向支臂。万向支臂具有旋转和悬吊平衡的两个运动,需要分别对万向支臂的旋转和悬吊平衡进行锁定,操作效率较低。且只能实现
对手术器械固定点位的支撑,需要操作手术器械解锁时,平衡装置在解锁状态下失去对手术器械的悬吊平衡功能,对缓解手术器械操作者的疲劳效果较差。
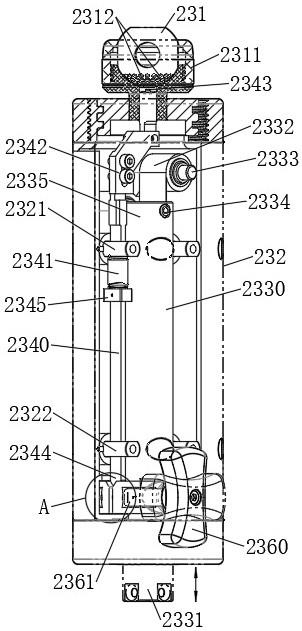
32.如图1至图5所示,本发明实施例提供一种旋转伸缩支臂结构,包括旋转机构、支臂壳体232、锁销机构、浮动机构、限位机构和锁紧机构,旋转机构能够多维度转动;支臂壳体232一端与旋转机构连接,支臂壳体232内形成有安装腔,锁销机构、浮动机构和限位机构均设于安装腔内;锁销机构具有与旋转机构连接、且使旋转机构位置固定的第一锁定位置;限位机构具有第二锁定位置,在第二锁定位置时,限位机构推动锁销机构移动到第一锁定位置,且限位机构与浮动机构连接,锁定浮动机构;锁紧机构的一端伸入安装腔内与限位机构连接,用于驱动限位机构切换至第二锁定位置。
33.具体而言,支臂壳体232一端与旋转机构连接,支臂壳体232能够通过旋转机构实现转动。
34.锁销机构处于第一锁定位置时,锁销机构与旋转机构连接,使旋转机构的位置固定。
35.浮动机构具有悬吊平衡功能,用于悬吊手术器械并平衡手术器械的重量,使操作者在操作手术器械时不用承担手术器械的重量,因此,浮动机构能够缓解操作者的疲劳。
36.本发明实施例中的旋转伸缩支臂结构中,旋转机构能够多维度转动,支臂壳体232一端与旋转机构连接,操作者转动支臂壳体232时,支臂壳体232可以随旋转机构摆动,浮动机构具有悬吊平衡功能,因此,旋转伸缩支臂结构应用于腹腔微创手术中,旋转伸缩支臂结构在摆动的同时悬吊平衡手术器械,满足手术器械操作角度需求并减轻手术过程中操作者的腕部负载,提高手术的稳定性。旋转伸缩支臂结构在操作时,锁紧机构驱动限位机构切换至第二锁定位置时,限位机构能够推动锁销机构移动与旋转机构连接,进而固定旋转机构,限位机构还与浮动机构连接,锁定浮动机构,也即,限位机构能够同时固定旋转机构和锁定浮动机构,锁紧机构的一次动作即可实现任一位置对旋转和悬吊两个自由度锁定,具有操作效率高的优点。
37.如图1、图2、图3和图5所示,在一实施例中,限位机构包括两个半环形板2350,半环形板2350相对的两端分别为板连接端2356和板限位端2357,两个半环形板2350的两个板连接端2356连接,两个板限位端2357相对设置且形成夹持空间,两个板限位端2357处于相互靠近的位置时限位机构处于第二锁定位置;锁销机构包括第一锁杆2340,第一锁杆2340位于夹持空间内,限位机构切换至第二锁定位置时,两个板限位端2357推动第一锁杆2340移动,第一锁杆2340移动使锁销机构移动到第一锁定位置。
38.如图2和图5所示,在一实施例中,板限位端2357设置朝向旋转机构的导向坡面2351;第一锁杆2340的一端为杆导向端2344,杆导向端2344呈v形,且位于两个导向坡面2351之间;两个板限位端2357相互靠近移动时,导向坡面2351与杆导向端2344接触,推动第一锁杆2340朝向旋转机构移动。
39.如图2所示,两个板限位端2357相互靠近移动时,两个导向坡面2351相向移动,两个导向坡面2351之间的距离缩短过程中,导向坡面2351会为杆导向端2344施加向上的推力,该推力使得杆导向端2344向上移动,也即推动第一锁杆2340朝向旋转机构移动。
40.如图1和图3所示,在一实施例中,锁紧机构具有第一位置和第二位置,限位机构还具有第二解锁位置,锁紧机构从第一位置切换至第二位置时,锁紧机构驱动限位机构从第
二解锁位置切换至第二锁定位置;锁销机构还包括偏压件2341,偏压件2341的一端与第一锁杆2340抵接,另一端与支臂壳体232抵接,偏压件2341为第一锁杆2340提供远离旋转机构的偏压力;锁紧机构从第二位置切换到第一位置时,偏压件2341驱动第一锁杆2340向远离旋转机构方向移动,杆导向端2344推动两个板限位端2357相互远离,使限位机构从第二锁定位置切换至第二解锁位置。
41.锁紧机构从第一位置切换至第二位置时,锁紧机构驱动限位机构从第二解锁位置切换至第二锁定位置,限位机构同时固定旋转机构和锁定浮动机构。锁紧机构从第二位置切换到第一位置时,锁紧机构不驱动限位机构动作,此时,偏压件2341的偏压力驱动第一锁杆2340向远离旋转机构方向移动,杆导向端2344位于两个导向坡面2351之间,杆导向端2344通过推动导向坡面2351使两个板限位端2357相互远离,使限位机构从第二锁定位置切换至第二解锁位置,限位机构同时解锁对旋转机构和锁定浮动机构锁定,旋转机构和浮动机构恢复自由状态。
42.如图1和图3所示,在一实施例中,偏压件2341为压缩弹簧,压缩弹簧套设于第一锁杆2340。
43.如图1和图3所示,支臂壳体232内设置第一限位部2321,第一限位部2321形成有第一限位通道,第一锁杆2340贯穿第一限位通道设置。第一锁杆2340上形成有杆限位部2345,压缩弹簧套设于第一锁杆2340上,压缩弹簧一端与第一限位部2321抵接,另一端与杆限位部2345抵接。偏压件2341为压缩弹簧,具有结构稳定可靠,安装简单的优点。
44.支臂壳体232内还设置第二限位部2322,第二限位部2322形成有第二限位通道,第一锁杆2340贯穿第二限位通道设置。第一限位部2321和第二限位部2322共同限制第一锁杆2340的移动轨迹,使得第一锁杆2340按照规定的方向移动。
45.如图5所示,在一实施例中,两个半环形板2350围成筒状腔;浮动机构包括伸缩杆2330;伸缩杆2330贯穿筒状腔,第二锁定位置时,两个半环形板2350抱紧伸缩杆2330,以锁定浮动机构。
46.如图5所示,半环形板2350的两个板连接端2356铰接,两个板限位端2357相对设置并具有相向移动的空间。第二锁定位置时,两个板限位端2357相向移动,两个半环形板2350围成的筒状腔横截面积缩小,能够抱紧伸缩杆2330,以锁定浮动机构。第二解锁位置时,两个板限位端2357相远离移动,两个半环形板2350围成的筒状腔横截面积增大,松开伸缩杆2330,以解锁浮动机构。使用两个半环形板2350抱紧伸缩杆2330以锁定浮动机构的结构,具有的结构简单,成本低且稳定性好的优点。
47.在一实施例中,半环形板2350为环形摩擦片。
48.环形摩擦片抱紧伸缩杆2330后,环形摩擦片和伸缩杆2330之间具有较大的摩檫力,进而确保在抱紧伸缩杆2330后伸缩杆2330不会沿着筒状腔轴线移动,保证对浮动机构的锁定效果。
49.如图1、图2和图5所示,在一实施例中,半环形板2350形成有通道;锁紧机构包括锁止旋钮2360和旋转杆2361,旋转杆2361一端伸入支臂壳体232内,穿过通道与半环形板2350连接,旋转杆2361另一端与锁止旋钮2360连接;锁止旋钮2360旋转带动旋转杆2361旋转,旋转杆2361旋转驱动两个板限位端2357相互靠近。
50.锁止旋钮2360旋转带动旋转杆2361旋转,旋转杆2361旋转驱动两个板限位端2357
相互靠近,当两个板限位端2357相互靠近时,两个板限位端2357推动第一锁杆2340使锁销机构移动到第一锁定位置,锁销机构锁定旋转机构,同时两个半环形板2350抱紧伸缩杆2330,以锁定浮动机构。也即,旋转锁止旋钮2360即可实现对旋转和悬吊两个自由度锁定,具有操作效率高的优点。
51.如图1、图2和图5所示,在一实施例中,通道包括限位凹槽2352和限位孔2355,限位孔2355一端位于板限位端2357的端面处,另一端位于限位凹槽2352的侧壁处。
52.限位孔2355一端位于板限位端2357的端面处时,限位孔2355距离板连接端2356的距离最远,根据杠杆原理,旋转锁止旋钮2360所需力最小,减少操作者旋转锁止旋钮2360用力。
53.如图1、图2和图5所示,在一实施例中,限位凹槽2352设置限位孔2355的侧壁形成有向侧壁内凹陷的第一凹陷部2353和第二凹陷部2354,第一凹陷部2353的深度大于第二凹陷部2354的深度;旋转杆2361为变截面杆,包括第一段杆2362和两个第二段杆2363,第一段杆2362位于两个第二段杆2363之间,第一段杆2362的直径小于第二段杆2363的直径,第一段杆2362插入限位孔2355内,第二段杆2363位于限位凹槽2352内,第二段杆2363靠近第一段杆2362的端部设有凸起2364,旋转杆2361旋转时凸起2364在第一凹陷部2353处和第二凹陷部2354处移动;凸起2364位于第一凹陷部2353内,两个板限位端2357相互远离,凸起2364位于第二凹陷部2354内,两个板限位端2357相互靠近。
54.两个板限位端2357相互靠近时,限位机构处于第二锁定位置;两个板限位端2357相互远离时,限位机构处于第二解锁位置。旋转锁止旋钮2360使旋转杆2361旋转,凸起2364通过在第一凹陷部2353处和第二凹陷部2354处移动的方式来控制两个板限位端2357之间的距离,使得限位机构在第二解锁位置和第二锁定位置之间切换,结构和原理简单,且结构相对稳定。
55.如图1、图2和图5所示,在一实施例中,第一凹陷部2353和第二凹陷部2354均呈扇形结构,扇形结构的中部深度大于两端的深度;凸起2364为与第一凹陷部2353适配的扇形的凸起。
56.由于扇形结构具有中部深度大于两端深度的特点,扇形的凸起位于第一凹陷部2353和第二凹陷部2354内后,不会轻易从第一凹陷部2353和第二凹陷部2354内脱出,结构具有更加稳定的优点。
57.如图1、图2和图5所示,在一实施例中,第一凹陷部2353和第二凹陷部2354均具有两个,绕限位孔2355的轴线呈交错设置;凸起2364具有两个,两个凸起2364相对于旋转杆2361的轴线镜像设置。
58.第一凹陷部2353、第二凹陷部2354和凸起2364的设置方式,锁止旋钮2360旋转90度即可从第一凹陷部2353处移动到第二凹陷部2354处,或是从第二凹陷部2354处移动到第一凹陷部2353处,限位机构实现第二解锁位置和第二锁定位置之间切换,实现对旋转和悬吊两个自由度锁定,具有操作效率高的优点。
59.如图1和图3所示,在一实施例中,旋转机构包括旋转壳体2311和万向球231,旋转壳体2311与支臂壳体232连接,旋转壳体2311内形成有球形内腔;万向球231设于球形内腔中,万向球231一端的部分伸出旋转壳体2311用于与外部连接,万向球231另一端设置有多个插接凹槽2312,插接凹槽2312适于锁销机构插入,以固定万向球231。
60.如图1和图3所示,万向球231的上端与固定台架等结构连接,万向球231的下端设置插接凹槽2312,旋转壳体2311转动带动支臂壳体232绕万向球231的球心转动,实现支臂壳体232一定角度范围内的摆动,该摆动范围为以万向球231球心为顶点的锥形区域。当支臂壳体232处于需要的角度后,锁销机构插入插接凹槽2312内,锁销机构与万向球231位置相对固定,旋转壳体2311与万向球231的相对位置固定,锁定万向球231。锁销机构插入插接凹槽2312内,以锁定万向球231的方式为对万向球231的硬锁定,具有较高的可靠性和承载能力。同时,旋转壳体2311和万向球231连接呈球铰结构,具有转动顺滑,可自由转动的优点。
61.如图3所示,旋转壳体2311包括位于上侧的上壳体和位于下侧的下壳体,上壳体和下壳体螺接共同围成球形内腔。下壳体与支臂壳体232固定连接。下壳体的中部形成有通道,该通道供锁销机构移动。
62.如图1和图3所示,在一实施例中,插接凹槽2312为尖点槽。
63.插接凹槽2312的排布方式,例如呈阵列排布,即具有多个横排和多个纵排,其中横排和纵排均为万向球231表面的弧线。
64.可以理解的是,在实际应用中,插接凹槽2312的排布方式可以根据使用需求设置,本发明实施例对此不做限定。
65.如图1和图3所示,在一实施例中,锁销机构包括依次连接的第一锁杆2340、第二锁杆2342和第三锁杆2343:第一锁杆2340与限位机构连接,第一锁杆2340与支臂壳体232的中线平行;第二锁杆2342弯折设置;第三锁杆2343位于支臂壳体232的中线处,第三锁杆2343的端部适于插入插接凹槽2312内。
66.第一锁杆2340和第二锁杆2342的移动轨迹为与支臂壳体232的中线平行,第三锁杆2343移动轨迹为与支臂壳体232的中线重合。第一锁杆2340受到朝向旋转机构的推动后,第一锁杆2340推动第二锁杆2342和第三锁杆2343朝向旋转机构移动,第三锁杆2343的端部插入到插接凹槽2312内,阻止万向球231的转动,从而锁定旋转机构。
67.如图1和图3所示,在一实施例中,浮动机构还包括平衡件2332,平衡件2332与支臂壳体232连接;伸缩杆2330包括相对设置的杆悬挂端2331和杆连接端2335,杆悬挂端2331伸出支臂壳体232用于悬挂手术器械,杆连接端2335用于与平衡件2332连接,平衡件2332用于平衡手术器械的重力。
68.如图1和图3所示,在一实施例中,平衡件2332为恒力弹簧,恒力弹簧的横截面呈螺旋状结构,恒力弹簧的内圈通过第一安装轴2333与支臂壳体232连接,恒力弹簧的外圈端部形成为筒状结构,恒力弹簧的外圈端部与杆连接端2335通过第二安装轴2334连接。其中,第一安装轴2333和第二安装轴2334均为垂直于支臂壳体232的中线设置,伸缩杆2330的中线与支臂壳体232的中线重合。
69.如图1所示,伸缩杆2330可沿着支臂壳体232的中线上下往复移动,恒力弹簧在受到伸缩杆2330拉力后可以绕第一安装轴2333自由转动,实现恒力弹簧平衡手术器械的重力功能。
70.旋转伸缩支臂结构在使用时,将手术器械与伸缩杆2330的杆悬挂端2331连接,伸缩杆2330受到手术器械重力的作用向下拉伸,恒力弹簧平衡手术器械的重力。转动支臂壳体232到需求的角度后,将锁止旋钮2360转动90度,锁止旋钮2360带动旋转杆2361旋转90
度,凸起2364从第一凹陷部2353移动到第二凹陷部2354内,两个板限位端2357相互靠近,导向坡面2351推动第一锁杆2340朝向旋转机构移动,第三锁杆2343的端部插入到万向球231的插接凹槽2312内,限制万向球231的转动,实现对旋转机构的锁定;同时两个板限位端2357相互靠近时,筒状腔收缩,两个半环形板2350抱紧伸缩杆2330,限制伸缩杆2330的伸缩移动,实现对浮动机构的锁定。
71.在需要转动支臂壳体232时,将锁止旋钮2360再转动90度,锁止旋钮2360带动旋转杆2361旋转90度,凸起2364从第二凹陷部2354移动到第一凹陷部2353内,偏压件2341驱动第一锁杆2340向远离旋转机构方向移动,第三锁杆2343的端部从万向球231的插接凹槽2312内移出,万向球231恢复自由转动,实现对旋转机构的解锁;第一锁杆2340向远离旋转机构方向移动过程中杆导向端2344推动两个板限位端2357相互远离,筒状腔增大,两个半环形板2350松开伸缩杆2330,伸缩杆2330恢复伸缩移动,实现对浮动机构的解锁。
72.本发明一实施例还公开了一种手术机器人,包括机座和上述实施例的旋转伸缩支臂结构,旋转伸缩支臂结构的旋转机构与机座连接,具体为旋转机构的万向球231上端与机座连接。
73.旋转伸缩支臂结构具有上述实施例中的优点,使得手术机器人满足操作者的使用需求,并具有操作效率高的优点。
74.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。