1.本发明涉及公路桥梁施工技术领域,尤其涉及一种钢筋笼吊挂定位装置及自由吊挂定位方法。
背景技术:
2.钢筋笼普遍应用于公路桥梁建设领域。由于钢筋笼本身具备较强稳定性和可靠性,再加上钢筋笼中浇筑混凝土,因而可达到较好的承载力和剪切力。
3.目前,虽然钢筋笼作为公路桥梁建设中的“骨架”,但其在实际安装定位方面却比较困难。这主要是因为钢筋笼通常是在钢筋预制厂制作好,再通过吊车、拖车以及专用起吊设备来吊挂至事先预制的坑基内。当前,将钢筋笼起吊至坑基的过程中,由于缺乏准确的定位,导致钢筋笼并没有较好地完成在坑基中的预埋,据此,将导致埋制的钢筋笼与地面不垂直,存在倾斜。而钢筋笼不能实现精准地达到预定位置,又将致使桥梁混凝土墩与实际存在偏差,严重影响桥身的安全和桥外观的美观。
4.目前,虽然也存在一些钢筋笼自由吊挂方法,但这些方法较为传统,并且工作效率低下,还存在钢筋笼自由吊挂定位误差较大的缺点。因此,如何实现钢筋笼自由吊挂的定位准确是当前公路桥梁建设技术领域中亟待解决的问题之一
′
技术实现要素:
5.本发明所要解决的技术问题在于提供一种钢筋笼吊挂定位装置及自由吊挂定位方法;利用该吊挂定位装置进行钢筋笼吊挂,不仅可以实现钢筋笼自由吊挂的准确定位以及钢筋笼始终与坑基表面相垂直,而且吊挂的工作效率也得到提高;同时,该装置与方法还能确保钢筋笼定位的稳定性和可靠性。
6.本发明采用以下技术方案解决上述技术问题:
7.一种钢筋笼吊挂定位装置,包括:
8.定位基座,所述定位基座为环形基座;
9.定位杆,所述定位杆垂直布置在所述环形基座的中心位置;
10.旋钮器,所述旋钮器设置在所述环形基座的上表面,且设置有多个;每个所述旋钮器分别设有朝向环形基座中心位置的旋钮螺杆与夹持圆弧板;所述旋钮器通过所述旋钮螺杆与夹持圆弧板的配合实现对所述定位杆的夹紧与释放;
11.拉杆,所述拉杆设置在所述环形基座的上方,且将每个所述旋钮器的顶端依次相连;
12.钻孔器,所述钻孔器设置在所述环形基座的下表面,用于向下钻孔。
13.作为本发明的优选方式之一,所述定位杆自所述环形基座的上方、向下延伸成型;并且,所述定位杆的最底端延伸到所述环形基座的下方,并连接有一尖头结构。
14.作为本发明的优选方式之一,所述旋钮器设置有四个;四个所述旋钮器在所述环形基座上、两两对称布置,并且,四个旋钮器的夹持圆弧板共同指向所述定位杆;其中,四个
所述夹持圆弧板分别配合在所述定位杆的外周,共同构成一个完整的定位杆夹设组件。
15.作为本发明的优选方式之一,每个所述旋钮器分别包括定位立柱、连接杆、调节杆、固定套、支撑杆、旋钮支撑杆以及所述旋钮螺杆与所述夹持圆弧板;其中,所述定位立柱垂直设置于所述环形基座的上表面,定位立柱的柱身连接有所述连接杆;所述连接杆的一端与所述定位立柱固定相连,其另一端向环形基座中心位置所在方向横向延伸,并于其延伸末端与所述旋钮支撑杆铰接;所述旋钮支撑杆的底端与所述连接杆相铰接,其上端通过轴套连接有所述旋钮螺杆;所述旋钮螺杆的杆身套接在所述轴套内,并与所述轴套螺纹连接,同时,所述旋钮螺杆上靠近环形基座中心的一端连接有所述夹持圆弧板;此外,所述连接杆的杆身还设有所述调节杆,定位立柱的柱身套接有所述固定套;所述调节杆的一端与所述连接杆相铰接,其另一端与所述固定套的外表面固定相连;同时,所述调节杆与旋钮支撑杆之间还固定连接有所述支撑杆。
16.作为本发明的优选方式之一,所述定位立柱通过螺栓固定于所述环形基座的上表面,同时,所述定位立柱的柱身通过螺栓安装固定有上、下两个连接杆;两个所述连接杆的一端分别固定在定位立柱的相应位置,其另一端则分别与一个旋钮支撑杆呈螺栓活动铰接连接;所述旋钮支撑杆的底端与对应的连接杆铰接,其上端分别焊接固定有一个轴套,所述轴套与旋钮螺杆螺纹连接;其中,所述旋钮螺杆上靠近环形基座中心的一端活动连接有所述夹持圆弧板,所述夹持圆弧板用于夹持定位杆;
17.此外,所述定位立柱上每个连接杆的上方位置还分别套接连接有一个固定套,每个连接杆的杆身则分别通过螺栓铰接连接有一个所述调节杆;其中,所述调节杆的一端与所述连接杆通过螺栓限位铰接,其另一端与固定套的外表面焊接固定;同时,所述调节杆与旋钮支撑杆之间还焊接固定连接有一个所述支撑杆。
18.作为本发明的优选方式之一,所述固定套与定位立柱之间呈滑动连接,并且,滑动限位于所述拉杆与定位立柱上对应的两个螺栓之间。
19.作为本发明的优选方式之一,每个所述旋钮螺杆上远离环形基座中心的一端还分别设置有一个旋转操作把手;在所述旋转操作把手的旋转动作下,所述旋钮螺杆带动所述夹持圆弧板靠近或远离所述环形基座的中心位置,以夹紧或释放所述定位杆。
20.作为本发明的优选方式之一,所述夹持圆弧板位于旋钮螺杆的一端,且与所述旋钮螺杆一端呈活动旋转连接。
21.作为本发明的优选方式之一,所述拉杆的设置个数与旋钮器相同,并且,所述拉杆与旋钮器之间呈套筒连接;
22.所述钻孔器设置有三个,且通过螺栓安装固定在所述环形基座上。
23.一种钢筋笼的自由吊挂定位方法,采用上述的钢筋笼吊挂定位装置;所述钢筋笼的自由吊挂定位方法具体包括如下步骤:
24.s1、吊挂场地整理并填筑作业平台:
25.清除软土与杂物,平整场地,并夯打密实,使基坑平台高出地面15~25cm;整理后的作业平台为钢筋笼直径的1.5~1.7倍;
26.s2、吊挂前的预定位:
27.将钢筋笼吊挂定位装置放置在整理后的场地上,且定位杆指向预定埋设钢筋笼的几何中心位置,且定位杆下端进入整理后的作业平台10~20cm深;
28.启动钢筋笼吊挂定位装置上的三工位钻孔器,将整理后的作业平台向下深钻三个固定基坑,固定基坑的直径为d;
29.s3、钻钢筋笼几何中心孔以及固定基坑浇筑混凝土:
30.将s2步骤中的钢筋笼吊挂定位装置挪走(挪到下一个定位点,以此循环下去),再用回转式钻机钻钢筋笼几何中心孔;然后,对固定基坑浇筑混凝土,直至到达到s2步骤中计算的固定基坑直径尺寸;
31.s4、吊挂定位装置复位:
32.将钢筋笼吊挂定位装置复位,并使装置的钻孔器均置于相应的固定基坑中,再检查定位杆是否位于钢筋笼几何中心;检查并确认定位杆的确位于钢筋笼几何中心后,通过旋转扭动钢筋笼吊挂定位装置上的各个旋钮螺杆,将各夹持圆弧板围成的直径调节成“略大于钢筋笼直径”的状态;最后,将定位杆从钢筋笼吊挂定位装置上拆卸下来;
33.s5、钢筋笼自由吊挂:
34.用吊车将事先预制好的钢筋笼竖直吊起,并拖至钢筋笼吊挂定位装置中;接着,再分别扭紧钢筋笼吊挂定位装置上的各个旋钮器,使各夹持圆弧板紧密夹设在钢筋笼四周;待向钢筋笼中浇筑混凝土后,拆解钢筋笼吊挂定位装置,即实现钢筋笼的自由吊挂。
35.作为本发明的优选方式之一,所述s2步骤中,固定基坑的直径d通过下列公式进行计算:
36.公式成立:
[0037][0038][0039][0040][0041][0042]
式中,g
‑
钢筋笼的重量;d
‑
固定基坑的直径;μ
‑
固定基坑与三工位钻孔器摩擦系数;δh
‑
固定基坑的深度;a
‑‑
固定基坑的截面积;[σ]
‑
许用剪切力;σ
‑
剪切力。
[0043]
本发明相比现有技术的优点在于:
[0044]
(1)本发明通过钢筋笼吊挂定位装置来定位钢筋笼的几何中心,钢筋笼定位的位置比较精确,不易跑偏;
[0045]
(2)本发明采用钢筋笼吊挂定位装置来实现钢筋笼的自由吊挂,吊挂定位装置中的旋钮器对钢筋笼夹持牢靠,能够将钢筋笼始终与整理后的工作平台呈垂直状态,吊挂定位比较容易实现,并且工作效率也得到提高;
[0046]
(3)本发明钢筋笼吊挂定位装置中的旋钮器采用上下两排并呈对称布置,两点呈一线对夹方式,对钢筋笼的夹持较为牢靠;同时,三工位钻孔器采用三点控制一面的原理,进一步实现钢筋笼自由吊挂的稳定性和可靠性;
[0047]
(4)本发明旋钮器结构中,连接杆的一端与定位立柱固连,另一端与旋钮支撑杆铰接,旋钮支撑杆与旋钮螺杆连接,同时,调节杆的一端与连接杆铰接,另一端与固定套固定相连;基于上述结构,在钢筋笼吊挂过程中,当钢筋笼受到冲击,夹持圆弧板受到影响,此时,固定套被调节杆带动沿定位立柱的柱体上下小幅度滑动,以缓冲冲击力对装置的影响;与此同时,夹持圆弧板与钢筋笼的横向受力不会发生变化,钢筋笼仍能保持稳固;
[0048]
(5)本发明钢筋笼吊挂定位装置制作简单,造价低廉。
附图说明
[0049]
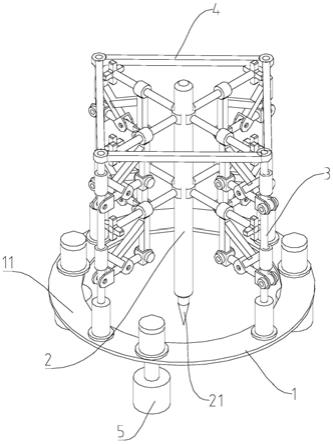
图1是实施例1中钢筋笼吊挂定位装置的整体结构示意图;
[0050]
图2是实施例1中单个旋钮器的结构示意图。
[0051]
图中:1为定位基座,11为环形基座,2为定位杆,21为尖头结构,3为旋钮器,31为定位立柱,32为连接杆,33为调节杆,34为固定套,35为支撑杆,36为旋钮支撑杆,361为轴套,37为旋钮螺杆,371为旋转操作把手,38为夹持圆弧板,4为拉杆,5为钻孔器。
具体实施方式
[0052]
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0053]
实施例1
[0054]
如图1~2所示,本实施例的一种钢筋笼吊挂定位装置,包括定位基座1、定位杆2、旋钮器3、拉杆4和钻孔器5。定位基座1为环形基座11。定位杆2垂直布置在环形基座11的中心位置。旋钮器3设置在环形基座11的上表面,且设置有多个;每个旋钮器3分别设有朝向环形基座11中心位置的旋钮螺杆37与夹持圆弧板38;旋钮器3通过旋钮螺杆37与夹持圆弧板38的配合实现对定位杆的夹紧与释放。拉杆4设置在环形基座11的上方,且将每个旋钮器3的顶端依次相连。钻孔器5设置在环形基座11的下表面,用于向下钻孔。
[0055]
具体地,在本实施例中,定位杆2自环形基座11的上方、向下延伸成型;并且,定位杆2的最底端延伸到环形基座11的下方,并连接有一尖头结构21。
[0056]
具体地,在本实施例中,旋钮器3设置有四个;四个旋钮器3在环形基座11上、两两对称布置,并且,四个旋钮器3的夹持圆弧板38共同指向定位杆2。其中,四个夹持圆弧板38分别配合在定位杆2的外周,共同构成一个完整的定位杆夹设组件。
[0057]
进一步地,每个旋钮器3分别包括定位立柱31、连接杆32、调节杆33、固定套34、支撑杆35、旋钮支撑杆36以及所述旋钮螺杆37与夹持圆弧板38。
[0058]
其中,定位立柱31通过螺栓垂直设置于环形基座11的上表面,且定位立柱31的柱身通过螺栓安装固定有上、下两个连接杆32。其中,两个连接杆32的一端分别固定在定位立柱31的相应位置,其另一端则向环形基座11中心位置所在方向横向延伸,并于其延伸末端分别与一个旋钮支撑杆36呈螺栓活动铰接连接。进一步地,旋钮支撑杆36的底端与对应的
连接杆32相铰接,其上端分别焊接固定有一个轴套361;旋钮螺杆37的杆身套接在轴套361内,并与轴套361螺纹连接,同时,旋钮螺杆37上靠近环形基座11中心的一端活动连接有夹持圆弧板38,夹持圆弧板38与旋钮螺杆37之间呈活动旋转连接。
[0059]
此外,定位立柱31上每个连接杆32的上方位置还分别套接连接有一个固定套34,每个连接杆32的杆身则分别通过螺栓铰接连接有一个调节杆33。其中,调节杆33的一端与连接杆32通过螺栓限位铰接,其另一端与固定套34的外表面焊接固定;同时,调节杆33与旋钮支撑杆36之间还焊接固定连接有一个支撑杆35。其中,固定套34与定位立柱31之间呈滑动连接,并且,滑动限位于拉杆4与定位立柱31上对应的两个螺栓之间。
[0060]
具体地,在本实施例中,拉杆4的设置个数与旋钮器3相同,并且,拉杆4与旋钮器3的定位立柱31顶端呈套筒连接;
[0061]
具体地,在本实施例中,钻孔器5设置有三个,且通过螺栓安装固定在环形基座11上,构成三工位钻孔器5。
[0062]
此外,需要注意的是,为了方便操作,每个旋钮螺杆37上远离环形基座11中心的一端还分别设置有一个旋转操作把手371。使用时,在旋转操作把手371的旋转动作下,旋钮螺杆37带动夹持圆弧板38靠近或远离环形基座11的中心位置,以夹紧或释放定位杆2。
[0063]
实施例2
[0064]
本实施例的一种钢筋笼的自由吊挂定位方法,采用上述实施例1中钢筋笼吊挂定位装置进行,且具体包括如下步骤:
[0065]
s1、吊挂场地整理并填筑作业平台:
[0066]
清除软土与杂物,平整场地,并夯打密实,使基坑平台高出地面15~25cm;整理后的作业平台为钢筋笼直径的1.5~1.7倍;
[0067]
s2、吊挂前的预定位:
[0068]
将钢筋笼吊挂定位装置放置在整理后的场地上,且定位杆2指向预定埋设钢筋笼的几何中心位置,且定位杆2下端进入整理后的作业平台10~20cm深;
[0069]
启动钢筋笼吊挂定位装置上的三工位钻孔器5,将整理后的作业平台向下深钻三个固定基坑,固定基坑的直径为d;
[0070]
s3、钻钢筋笼几何中心孔以及固定基坑浇筑混凝土:
[0071]
将s2步骤中的钢筋笼吊挂定位装置挪走(挪到下一个定位点,以此循环下去),再用回转式钻机钻钢筋笼几何中心孔;然后,对固定基坑浇筑混凝土,直至到达到s2步骤中计算的固定基坑直径尺寸;
[0072]
s4、吊挂定位装置复位:
[0073]
将钢筋笼吊挂定位装置复位,并使装置的钻孔器5均置于相应的固定基坑中,再检查定位杆2是否位于钢筋笼几何中心;检查并确认定位杆2的确位于钢筋笼几何中心后,通过旋转扭动钢筋笼吊挂定位装置上的各个旋钮螺杆37,将各夹持圆弧板38围成的直径调节成“略大于钢筋笼直径”的状态;最后,将定位杆2从钢筋笼吊挂定位装置上拆卸下来;
[0074]
s5、钢筋笼自由吊挂:
[0075]
用吊车将事先预制好的钢筋笼竖直吊起,并拖至钢筋笼吊挂定位装置中;接着,再分别扭紧钢筋笼吊挂定位装置上的各个旋钮器3,使各夹持圆弧板38紧密夹设在钢筋笼四周;待向钢筋笼中浇筑混凝土后,拆解钢筋笼吊挂定位装置,即实现钢筋笼的自由吊挂。
[0076]
其中,s2步骤中,固定基坑的直径d通过下列公式进行计算:
[0077]
公式成立:
[0078][0079][0080][0081][0082][0083]
式中,g
‑
钢筋笼的重量;d
‑
固定基坑的直径;μ
‑
固定基坑与三工位钻孔器摩擦系数;δh
‑
固定基坑的深度;a
‑‑
固定基坑的截面积;[σ]
‑
许用剪切力;σ
‑
剪切力。
[0084]
在施工项目现场上,将钢筋笼人工吊挂定位、吊车自由吊挂定位以及本发明自由吊挂方法分别施工的钢筋笼吊挂,从中各选择5个吊挂钢筋笼,从吊挂效率、与基坑的垂直度以及钢筋笼定位准确度三方面做对比,得出的数据如表1所示。
[0085]
表1三种吊挂方法的数据对比
[0086]
吊挂方法吊挂效率与基坑的垂直度钢筋笼定位准确度人工吊挂定位低下存在偏斜存在较大误差吊车自由吊挂定位较高存在偏斜存在较大误差本发明自由吊挂定位较高垂直误差较小
[0087]
由表1评估结果可知,本发明自由吊挂定位方法是最优的。
[0088]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。