1.本发明涉及一种用于电动轮椅的停车控制方法、装置、设备及存储介质,属于轮椅控制技术领域。
背景技术:
2.随着中国人口老龄化程度加重以及残疾人口的日益增多,出现了各种疾病护理和康复辅助器械。电动轮椅具有方便、灵活、省力等优势,逐渐取代了传统轮椅的市场地位。
3.目前,市面上的电动轮椅停车时,在检测到刹车信号时,主要通过对两轮电机独立减速控制轮椅停车,由于左右轮的速度不同,将导致轮椅停下后的方向偏离用户期望的方向,这种方法存在一定的安全隐患,用户体验较差。
4.为了解决上述问题,本技术提出了一种用于电动轮椅的停车控制方法、装置、设备及存储介质。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种用于电动轮椅的停车控制方法、装置、设备及存储介质,有效改善了行进中的电动轮椅在检测到停车信号时,由于左右驱动轮速度不同而导致轮椅停下后的方向偏离用户期望方向的问题。
6.为达到上述目的,本发明是采用下述技术方案实现的:
7.第一方面,本发明提供了一种用于电动轮椅的停车控制方法,包括:
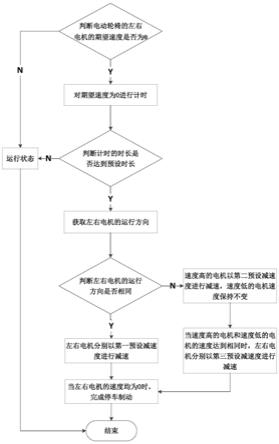
8.判断电动轮椅的左右电机的期望速度是否为0,
9.若否,则进入运行状态,若是,则对期望速度为0进行计时;
10.判断计时的时长是否达到预设时长,
11.若否,则进入运行状态,若是,则获取左右电机的运行方向;
12.判断左右电机的运行方向是否相同,
13.若否,则左右电机分别以第一预设减速度进行减速,若是,则速度高的电机以第二预设减速度进行减速,速度低的电机速度保持不变,当速度高的电机和速度低的电机的速度达到相同时,左右电机分别以第三预设减速度进行减速;
14.当左右电机的速度均为0时,完成停车制动。
15.优选的,所述第一预设减速度为电动轮椅所配置的最大减速度。
16.优选的,所述第二预设减速度为电动轮椅所配置的最大减速度,所述第三预设减速度根据完成停车制动的时间确定且所述第三预设减速度小于电动轮椅所配置的最大减速度。
17.第二方面,本发明提供了一种用于电动轮椅的停车控制装置,所述装置包括:
18.期望速度判断模块:用于判断电动轮椅的左右电机的期望速度是否为0,若否,则进入运行状态,若是,则对期望速度为0进行计时;
19.计时判断模块:用于判断计时的时长是否达到预设时长,若否,则进入运行状态,
若是,则获取左右电机的运行方向;
20.方向判断模块:用于判断左右电机的运行方向是否相同,若否,则左右电机分别以第一预设减速度进行减速,若是,则速度高的电机以第二预设减速度进行减速,速度低的电机速度保持不变,当速度高的电机和速度低的电机的速度达到相同时,左右电机分别以第三预设减速度进行减速;
21.停车制动模块:用于判断左右电机的速度是否均为0,若是,则完成停车制动。
22.第三方面,本发明提供了一种用于电动轮椅的停车控制设备,包括处理器及存储介质;
23.所述存储介质用于存储指令;
24.所述处理器用于根据所述指令进行操作以执行根据上述任一项所述方法的步骤。
25.第四方面,本发明提供了计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现上述任一项所述方法的步骤。
26.与现有技术相比,本发明所达到的有益效果:
27.本发明提供的一种用于电动轮椅的停车控制方法、装置、设备及存储介质,对轮椅停车时的行进方向进行分类,采用不同的减速方式,有效改善了行进中的电动轮椅在检测到停车信号时,由于左右驱动轮速度不同而导致轮椅停下后的方向偏离用户期望方向的问题。
附图说明
28.图1是本发明实施例提供的一种用于电动轮椅的停车控制方法的流程示意图。
具体实施方式
29.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
30.实施例一:
31.如图1所示,本实施例提供了一种用于电动轮椅的停车控制方法,包括以下步骤:
32.步骤1、判断电动轮椅的左右电机的期望速度是否为0,
33.若否,则进入运行状态,若是,则对期望速度为0进行计时;
34.步骤2、判断计时的时长是否达到预设时长,
35.若否,则进入运行状态,若是,则获取左右电机的运行方向;
36.步骤3、判断左右电机的运行方向是否相同,
37.若否,则左右电机分别以第一预设减速度进行减速,若是,则速度高的电机以第二预设减速度进行减速,速度低的电机速度保持不变,当速度高的电机和速度低的电机的速度达到相同时,左右电机分别以第三预设减速度进行减速; (设左右轮实际速度分别为v
l
、v
r
,假设v
l
>v
r
,即左电机大于右电机的速度,左电机减速度a
l
为配置的最大减速a,左电机从当前的速度降为0的时间t根据左电机的速度vl计算得出:t=v
l
/a;为了保证右电机停车时间与左电机相同,右轮的减速度a
r
根据当前电机的速度v
r
和时间t计算得出:a
r
=v
r
/t)其中,第一预设减速度为电动轮椅所配置的最大减速度,第二预设减速度为电动轮椅所配置的最大减速度,第三预设减速度根据完成停车制动的时间确定且第三预设减速度小于电动
轮椅所配置的最大减速度。
38.步骤4、当左右电机的速度均为0时,完成停车制动。
39.实施例二:
40.本实施例提供了一种用于电动轮椅的停车控制装置,包括:
41.期望速度判断模块:用于判断电动轮椅的左右电机的期望速度是否为0,若否,则进入运行状态,若是,则对期望速度为0进行计时;
42.计时判断模块:用于判断计时的时长是否达到预设时长,若否,则进入运行状态,若是,则获取左右电机的运行方向;
43.方向判断模块:用于判断左右电机的运行方向是否相同,若否,则左右电机分别以第一预设减速度进行减速,若是,则速度高的电机以第二预设减速度进行减速,速度低的电机速度保持不变,当速度高的电机和速度低的电机的速度达到相同时,左右电机分别以第三预设减速度进行减速;
44.停车制动模块:用于判断左右电机的速度是否均为0,若是,则完成停车制动。
45.实施例三:
46.本实施例提供了一种用于电动轮椅的停车控制设备,包括处理器及存储介质;
47.存储介质用于存储指令;
48.处理器用于根据指令进行操作以执行根据实施例一任一项方法的步骤。
49.实施例四:
50.本实施例提供了计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现实施例一任一项方法的步骤。
51.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、 cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
52.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。