技术特征:
1.一种基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,通过以下步骤来实现:a).建立车辆运动学模型,设车辆的两前轮和两后轮分别具有同样的运动规律,两前轮胎和两后轮胎各用一个轮胎来描述,只考虑车辆横向运动,且忽略转向机构的影响,基于大地坐标系xoy建立车辆运动学模型,根据运动学定理,得出车辆各状态的更新迭代公式如下:x
t 1
=x
t
v
t
cos(ψ
t
β)
×
dt
ꢀꢀꢀꢀꢀ
(1)y
t 1
=y
t
v
t
sin(ψ
t
β)
×
dt
ꢀꢀꢀꢀꢀ
(2)v
t 1
=v
t
a
×
dt
ꢀꢀꢀꢀꢀꢀꢀ
(4)式中β由公式(5)得出:式中:x
t
、x
t 1
和y
t
、y
t 1
分别为车辆质心在大地坐标系下的横坐标和纵坐标,ψ为车辆当前的偏航角,即车身与x轴的夹角,v为车辆的线速度,δ
f
为车前轮转角,即车前轮与车身的夹角,a为车辆的加速度,l
f
、l
b
分别表示前车轮、后车轮到车辆质心的距离;并建立车辆与目标路径的横向偏差e(t)的计算公式;b).建立pid分段控制参数表,首先判断pid分段控制参数表是否建立,如果已经建立,则根据车辆当前车速v从pid分段控制参数表中获取当前比例控制参数k
p
、积分控制参数k
i
和微分控制参数k
d
;如果pid分段控制参数表没有建立,则通过以下步骤建立pid分段控制参数表:b
‑
1).车速分段,以每段车速长度为1m/s进行分段,将车速划分为[0,1)、[1,2)、
…
、[n
‑
1,n)共计n段;b
‑
2).选取四种最优算法,选取粒子群算法pso、改进的粒子群算法pso
‑
cf、改进的粒子群算法apso以及遗传算法ga,作为求取pid分段控制参数的粒子群
‑
遗传混合算法pcag;b
‑
3).初始化四个算法的种群,首先建立如公式(6)所示的适应度函数:式中,e(t)为车辆与目标路径的横向偏差,t为当前时刻;然后确定每个最优算法的种群规模、迭代次数,并初始化种群的位置;b
‑
4).计算全局最优解,根据四种算法的更新速度和公式规则,更新每个粒子的速度和当前位置,根据适应度函数计算适应度,更新个体最优适应度和全局最优适应度,获取每种算法的全局最优解;b
‑
5).粒子替换,利用步骤b
‑
4)中利用4种算法求取的4个全局最优解,将四种算法中适应度最差的4个粒子替换掉;b
‑
6).收敛判断,判断全局最优解是否达到收敛条件,如果达到,则执行步骤b
‑
7),如果没有达到收敛条件,则执行步骤b
‑
4);b
‑
7).迭代次数判断,如果迭代次数没有达到要求,则执行步骤b
‑
4);如果迭代次数达
到要求,则输出四种算法的最后解作为当前车速分段的pid分段控制参数,执行步骤b
‑
8);b
‑
8).分段判断,判断所有的车速分段的pid分段控制参数是否已求取完毕,如果求取完毕,则执行步骤c);如果没有求取完毕,则通过步骤b
‑
2)至步骤b
‑
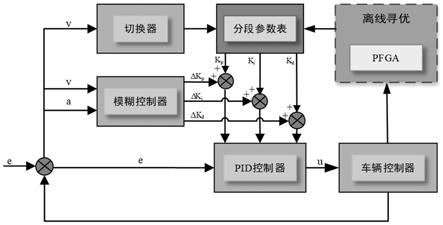
7)求取下一车速分段的pid分段控制参数;c).获取模糊控制器输出,利用车速v和加速度a作为模糊控制器的输入,获取模糊控制器的输出δk
p
、δk
i
和δk
d
;δk
p
、δk
i
和δk
d
分别作为k
p
、k
i
和k
d
的增量,模糊控制器的输出与pid分段控制参数表输出的参数相加后输入至pid控制器;d).pid控制器输出,利用公式(7)计算出pid控制器的输出:d).pid控制器输出,利用公式(7)计算出pid控制器的输出:式中,b(t)为pid控制器输出的车辆转向角度,e(t)、e(t
‑
1)分别为当前时刻和前一时刻车辆与目标路径的横向偏差;e).车辆控制,将车辆转向角度b(t)输入至车辆控制器,对车辆的转向角度进行控制,以控制车辆与目标路径的横向偏差。2.根据权利要求1所述的基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,步骤c)中模糊控制器通过以下方法进行建立:c
‑
1).输入和输出变量的模糊化,将车辆的车速v和加速度a作为模糊控制器的输入,其中v的论域为[
‑
30,30],a的论域为[
‑
3,3],模糊控制器的输出量为pid参数δk
p
、δk
i
和δk
d
;量化等级设为7级,语言变量分别定义为负大nb、负中nm、负小ns、零zo、正小ps、正中pm、正大pb;隶属度函数采用三角形与s形隶属度函数,其中:负大和正大采用s形隶属度函数,用于当有大偏差时快速响应,负中、负小、零、正小、正中均采用分辨率、灵敏度高的三角形隶属度函数;c
‑
2).制定模糊规则,采用“if
‑
then”控制规则,制定如表1所示的控制规则:表1对于输出的语言变量,从左至右分别为δk
p
、δk
i
和δk
d
的模糊规则;c
‑
3).模糊推理和解模糊,采用如公式(8)所示的模糊推理方法:r
i
:if e is e
j and e
c is e
k
then u is u
jk
ꢀꢀꢀꢀꢀꢀ
(8)其中,表示第i条控制规则,e为v,e
c
为a,e
j
、e
k
分别表示第j行和第k列的取值,i=1,2,...,49,j、k=1,2,...,7;u
jk
表示第j行、第k列对应的语言变量;
采用公式(9)所示的重心法进行解模糊:式中,m表示输出量化级数,m=7,u
i
为模糊控制器论域中的值,μ(u
i
)为m的隶属度值,u为解模糊后最终的输出值;通过模糊推理和解模糊,最终得到模糊控制器的pid参数δk
p
、δk
i
和δk
d
。3.根据权利要求1或2所述的基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,步骤b
‑
2)中:b
‑2‑
1).粒子群算法pso、改进的粒子群算法pso
‑
cf和改进的粒子群算法apso,均建立如公式(10)所示的当前位置和飞行速度:其中,x
in
和v
in
分别表示第i个粒子在第n维的位置和速度;算法开始时,先用随机位置x
i
和速度v
i
初始化粒子群,并使用粒子群的位置坐标作为输入值来计算适应度函数;粒子群算法pso的种群中第i个例子的第d维的速度和位置更新方程如公式(11)所示:式中,rand∈(0,1)为随机生成的数,c1和c2为学习因子,ω为惯性权重,p
gd
为所有粒子全局最优的适应度,p
id
为第i个粒子个体最优适应度;b
‑2‑
2).粒子群算法pso
‑
cf的速度更新方程如公式(12)所示:v
id
(t 1)=λ(v
id
(t) c1×
rand
×
(p
id
‑
x
id
(t)) c2×
rand
×
(p
gd
‑
x
id
(t)))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)其中:粒子群算法pso
‑
cf的位置更新方程与粒子群算法pso的相同;b
‑2‑
3).改进的粒子群算法apso速度更新方程如公式(14)所示:式中,s为大于
‑
1的常数,t为当前迭代次数,t为总迭代次数;改进的粒子群算法apso的位置更新方程与粒子群算法pso的相同。4.根据权利要求1或2所述的基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,步骤b
‑
2)所述的遗传算法ga通过以下步骤来实现:步骤1:随机生成个体种群,并计算每个个体的适应度;
步骤2:根据适应度确定该种群中的个体是遗传还是被淘汰;步骤3:将选择出进行遗传的个体进行配对作为父个体,将两个个体的部分码值进行交换,从而得到新的个体;步骤4:根据变异概率,随机变更个体中码值,得到变异后的新个体;步骤5:重新计算适应度,若到达迭代次数,则输出全局最优,否则重复步骤2。5.根据权利要求1或2所述的基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,步骤a)中所述的车辆与目标路径的横向偏差e(t)的建立方法如下:a
‑
1).求质心到路径的最短距离,设车辆的目标路径曲线用公式(15)所示的三次方程表示:y=ax3 bx2 cx d
ꢀꢀꢀꢀꢀꢀꢀ
(15)设车辆t时刻质心坐标为p
t
(x
t
,y
t
),p
t
(x
t
,y
t
)到路径曲线最短路径与曲线交点为p(x,y),则点p
t
(x
t
,y
t
)到曲线的最短距离为:a
‑
2).利用牛顿法求近似解;令:l=(x
t
‑
x)2 (y
t
‑
y)2ꢀꢀꢀꢀꢀꢀꢀ
(17)将公式(15)带入公式(17),得:将公式(18)对x一次求导:利用牛顿法求取方程l
′
的近似解:令:迭代初值:x0=x
t
‑
0.3
ꢀꢀꢀꢀꢀꢀꢀ
(21)迭代公式:x
n 1
=x
n
‑
f(x
n
)/f
′
(x
n
)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(22)精度阈值为10
‑
12
,迭代次数为100;假定求得的近似解为x=x
d
,代入式(15)中得到曲线上的一点p
d
=(x
d
,y
d
);a
‑
3).求横向偏差,过点p
d
=(x
d
,y
d
)作路径曲线的切线,得到切线的斜率为为:记θ1为切线与x轴的夹角;则:k=tanθ1ꢀꢀꢀꢀꢀ
(24)
记θ2为点p与点p
t
两点之间的连线与竖直方向的夹角,根据三角形内角和等于180
°
以及相似三角形定理得:θ1=θ2;则车辆与目标路径的横向偏差e(t)为:6.根据权利要求1或2所述的基于粒子群
‑
遗传混合算法的车辆横向pid控制方法,其特征在于,步骤b)所建立的pid分段控制参数表为:表2速度参数0~1m/skp0,ki0,kd01~2m/skp1,ki1,kd12~3m/skp2,ki2,kd23~4m/skp3,ki3,kd34~5m/skp4,ki4,kd4……
n~n
1
m/skp
n
,ki
n
,kd
n
。
技术总结
本发明的基于粒子群
技术研发人员:高嵩 高珅琦 潘为刚 王目树 秦石铭 王书新 康超 张允刚 董兴学 徐飞 赵天怀 刘志远 胡浩 李正磊
受保护的技术使用者:山东交通学院
技术研发日:2021.08.30
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。