1.本发明涉及医疗机器人技术领域,尤其涉及一种主从式咽拭子采样机器人控制系统。
背景技术:
2.随着时代的发展,机器人在各个领域的应用也越来越广泛。医疗机器人是融合了医学、电子、机械、光学、人机接口、模式识别等多领域的综合性医疗器械,软硬件层面往往包括多个组成部件,相互之间需要进行通讯、控制,各部件的质量会直接或者间接影响到整个机器人系统的正常运行。目前医用机器人主要分为手术机器人和康复及功能补偿类机器人两大类,在手术机器人中又主要分为主从遥控式和图像引导式两个类。手术机器人的出现改变了以前手术会造成的巨大伤口,微创手术让患者更快的康复出院,同时机器人可以替代医生,让医生放下手术刀,在遇到一些精确的毛细血管的手术时,手术机器人有着绝对的精确而且不会像人类一样出现细微的颤抖,在未来的发展中,机器人会更多的取代医生在手术中作用。
3.在人工进行咽拭子取样的时候,取样人员要与被检测人员面对面,增加了取样者感染的风险,对取样人员的防护要求较高,同时有少数人在咽拭子取样的时候可能因为操作不当引起干呕,影响取样效果,因此,设计一种主从式咽拭子采样机器人控制系统是很有必要的。
技术实现要素:
4.本发明解决的问题在于提供一种主从式咽拭子采样机器人控制系统,用于解决医生在咽拭子采样过程中面临交叉感染的风险和统一采样过程标准化。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种主从式咽拭子采样机器人控制系统,包括:六自由度主机械臂和主操作手柄、六自由度从机械臂和拭子夹、主控制器、从控制器、主从学习、主从同步采样和交互界面;
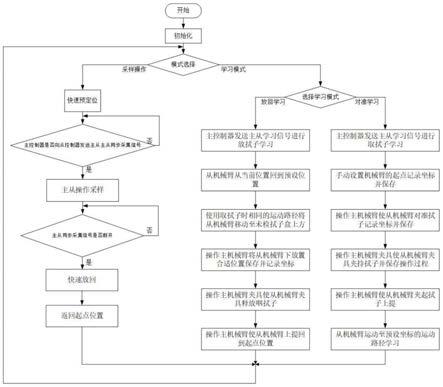
7.主从学习模式包括“对准操作”和“放回操作”两个过程的学习;在主从学习模式下,操作主机械臂动作,主控制器会将主机械臂各关节转角信息传送给从控制器,从控制器按照接收到的关节转角信息控制从机械臂运动,每按一次“学习”按钮,即可记录一组当前各个关节转角信息和拭子夹状态信息,达到主从学习的目的;
8.在操作模式下,用拇指按一下“对准操作”按扭,从机械臂按照学习过的“对准操作”程序,自动完成对准操作过程,把拭子送到口腔前面的预定位置;然后,用食指按住“同步采样”按钮,同时操作主机械臂动作,从机械臂同步动作,完成从口腔采样;从口腔采样后,松开“同步采样”按钮,用拇指按一下“放回操作”按钮,从机械臂按照学习过的“放回操作”程序,自动完成放回操作过程,把采样后的拭子送回到指定位置,等待下次操作循环;最终实现“快速预定位
→
主从同步操作采样
→
快速放回”过程。
9.作为本发明进一步的方案:所述六自由度主机械臂和操作手柄与六自由度从机械
臂和拭子夹,主机械臂由6个串行总线舵机组成关节部分,通过操作主机械臂前端的手柄来控制主从机械臂的运动;从机械臂由6个串行总线舵机组成关节部分。
10.作为本发明进一步的方案:所述主控制器,串行总线舵机通过串口发送指令将当前的位置角度信息反馈给stm32主控制器;主控制器记录并保存设置的位置坐标。
11.作为本发明进一步的方案:所述从控制器,从控制器为stm32,当接收到主控制器发送的位置角度信息从控制器控制对应的舵机旋转相应的角度。
12.作为本发明进一步的方案:所述主从学习,医生按下主从学习按键控制主机械臂运动,主控制器向从控制器发送主从学习信号将主机械臂标定的位置角度信息传达给从控制器;从控制器接收到主从学习信号后处理各个关节位置角度信息控制从机械臂运动;并通过从控制器学习并记录各个关节的位置角度信息及坐标值,达到主从学习的目的;并在从机械臂学习主机械臂动作后自动运行已学习的动作;所述学习及保存分为对准学习、放回学习;对准学习:
13.步骤一:医生按下同步采样键操纵主机械臂设置从机械臂的起点坐标s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60);
14.步骤二:控制从机械臂从未检拭子盒中对准咽拭子采样条坐标为s10(x11,y11,z11)、s20(x21,y21,z21)、s30(x31,y31,z31)、s40(x41,y41,z41)、s50(x51,y51,z51)、s60(x61,y61,z61);
15.步骤三:控制从机械臂夹持咽拭子采样条坐标为s10(x12,y11,z12)、s20(x22,y22,z22)、s30(x32,y32,z32)、s40(x42,y42,z42)、s50(x52,y52,z52)、s60(x62,y62,z62);
16.步骤四:向上夹起咽拭子采样条移动到坐标s10(x13,y13,z13)、s20(x23,y23,z23)、s30(x33,y33,z33)、s40(x43,y43,z43)、s50(x53,y53,z53)、s60(x63,y63,z63);
17.步骤五:在从机械臂向上夹起咽拭子采样条后,至运动到预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60)过程中标定3个运动坐标组分别为:
18.s10(x14,y14,z14)、s20(x24,y24,z24)、s30(x34,y34,z34)、s40(x44,y44,z44)、s50(x54,y54,z54)、s60(x64,y64,z64);
19.s10(x15,y15,z15)、s20(x25,y25,z25)、s30(x35,y35,z35)、s40(x45,y45,z45)、s50(x55,y55,z55)、s60(x65,y65,z65);
20.s10(x16,y16,z16)、s20(x26,y26,z26)、s30(x36,y36,z36)、s40(x46,y46,z46)、s50(x56,y56,z56)、s60(x66,y66,z66);
21.对准过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行对准操作时,仅需按下对准键即可自动完成;
22.所述放拭子学习步骤为:
23.步骤一:完成对被测人员采样后医生控制主机械臂使从机械臂移动至安全区域松开同步采样按键,从机械臂自动运动至预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60);
24.步骤二:经由已标定的3个运动组坐标运动至已检拭子盒上方坐标为s10(x17,
y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67);
25.步骤三:向下运动至s10(x18,y18,z18)、s20(x28,y28,z28)、s30(x38,y38,z38)、s40(x48,y48,z48)、s50(x58,y58,z58)、s60(x68,y68,z68)松开夹具放下拭子;
26.步骤四:再向上运动至坐标为s10(x17,y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67)后回到起点s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60)以便下次采样操作;
27.放回过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行放回操作时,仅需按下放回键即可自动完成。
28.作为本发明进一步的方案:所述主从采样,从机械臂运动到设定位置时,由医生按下主从同步采样动作按键,主控制器向从控制器发送主从同步采样信号,控制主机械臂运动实现从机械臂同步运动;此过程实现对被测人员的采样。
29.作为本发明进一步的方案:所述采样同步按键,采样同步动作为点动控制,到达预设位置后医生按下同步按键实现主从姿态同步,松开采样同步按键主从机械臂同时保持当前位姿等待主从同步采样信号;所述交互界面,由led触摸屏、按键组成。led触摸屏可选择并显示当前模式、设置操作步骤,设置位置坐标等;操作按键由夹持、松开、结束、确定、旋钮开关组成。
30.本发明的有益效果是:本发明,通过采样机器人进行采样,避免了人工进行咽拭子采样时取样人员与被检测人员面对面的情况,有效降低医生在咽拭子采样过程中面临交叉感染的风险;同时,通过使用机器人控制系统代替人工取样,采样更加稳定和准确,使得统一采样过程标准化,避免人工操作不当引起干呕的情况,导致取样效果受到影响。
附图说明
31.图1为本发明的控制流程图;
32.图2为本发明的主从式咽拭子采样机器人操作流程图;
33.图3为本发明的主从式咽拭子采样机器人模型图;
34.图4为本发明的主从式咽拭子采样机器人的交互界面;
35.图5为本发明的采样控制方式。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.下面给出具体实施例。
38.请参阅图1
‑
5,一种主从式咽拭子采样机器人控制系统,包括:六自由度主机械臂和主操作手柄、六自由度从机械臂和拭子夹、主控制器、从控制器、主从学习、主从同步采样和交互界面;
39.主从学习模式包括“对准操作”和“放回操作”两个过程的学习;在主从学习模式下,操作主机械臂动作,主控制器会将主机械臂各关节转角信息传送给从控制器,从控制器按照接收到的关节转角信息控制从机械臂运动,每按一次“学习”按钮,即可记录一组当前各个关节转角信息和拭子夹状态信息,达到主从学习的目的;
40.在操作模式下,用拇指按一下“对准操作”按扭,从机械臂按照学习过的“对准操作”程序,自动完成对准操作过程,把拭子送到口腔前面的预定位置;然后,用食指按住“同步采样”按钮,同时操作主机械臂动作,从机械臂同步动作,完成从口腔采样;从口腔采样后,松开“同步采样”按钮,用拇指按一下“放回操作”按钮,从机械臂按照学习过的“放回操作”程序,自动完成放回操作过程,把采样后的拭子送回到指定位置,等待下次操作循环;最终实现“快速预定位
→
主从同步操作采样
→
快速放回”过程。
41.请参阅图3,所述六自由度主机械臂和操作手柄与六自由度从机械臂和拭子夹,主机械臂由6个串行总线舵机组成关节部分,通过操作主机械臂前端的手柄来控制主从机械臂的运动;从机械臂由6个串行总线舵机组成关节部分;
42.请参阅图1,所述主控制器,串行总线舵机通过串口发送指令将当前的位置角度信息反馈给stm32主控制器;主控制器记录并保存设置的位置坐标;
43.所述从控制器,从控制器为stm32,当接收到主控制器发送的位置角度信息从控制器控制对应的舵机旋转相应的角度;
44.请参阅图1、2,所述主从学习,医生按下主从学习按键控制主机械臂运动,主控制器向从控制器发送主从学习信号将主机械臂标定的位置角度信息传达给从控制器;从控制器接收到主从学习信号后处理各个关节位置角度信息控制从机械臂运动;并通过从控制器学习并记录各个关节的位置角度信息及坐标值,达到主从学习的目的;并在从机械臂学习主机械臂动作后自动运行已学习的动作;所述学习及保存分为对准学习、放回学习;对准学习:
45.步骤一:医生按下同步采样键操纵主机械臂设置从机械臂的起点坐标s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60);
46.步骤二:控制从机械臂从未检拭子盒中对准咽拭子采样条坐标为s10(x11,y11,z11)、s20(x21,y21,z21)、s30(x31,y31,z31)、s40(x41,y41,z41)、s50(x51,y51,z51)、s60(x61,y61,z61);
47.步骤三:控制从机械臂夹持咽拭子采样条坐标为s10(x12,y11,z12)、s20(x22,y22,z22)、s30(x32,y32,z32)、s40(x42,y42,z42)、s50(x52,y52,z52)、s60(x62,y62,z62);
48.步骤四:向上夹起咽拭子采样条移动到坐标s10(x13,y13,z13)、s20(x23,y23,z23)、s30(x33,y33,z33)、s40(x43,y43,z43)、s50(x53,y53,z53)、s60(x63,y63,z63);
49.步骤五:在从机械臂向上夹起咽拭子采样条后,至运动到预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60)过程中标定3个运动坐标组分别为:
50.s10(x14,y14,z14)、s20(x24,y24,z24)、s30(x34,y34,z34)、s40(x44,y44,z44)、s50(x54,y54,z54)、s60(x64,y64,z64);
51.s10(x15,y15,z15)、s20(x25,y25,z25)、s30(x35,y35,z35)、s40(x45,y45,z45)、
s50(x55,y55,z55)、s60(x65,y65,z65);
52.s10(x16,y16,z16)、s20(x26,y26,z26)、s30(x36,y36,z36)、s40(x46,y46,z46)、s50(x56,y56,z56)、s60(x66,y66,z66);
53.对准过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行对准操作时,仅需按下对准键即可自动完成;
54.请参阅图2,所述放回学习步骤为:
55.步骤一:完成对被测人员采样后医生控制主机械臂使从机械臂移动至安全区域松开同步采样按键,从机械臂自动运动至预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60);
56.步骤二:经由已标定的3个运动组坐标运动至已检拭子盒上方坐标为s10(x17,y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67);
57.步骤三:向下运动至s10(x18,y18,z18)、s20(x28,y28,z28)、s30(x38,y38,z38)、s40(x48,y48,z48)、s50(x58,y58,z58)、s60(x68,y68,z68)松开夹具放下拭子;
58.步骤四:再向上运动至坐标为s10(x17,y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67)后回到起点s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60)以便下次采样操作;
59.放回的过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行放回操作时,仅需按下放回键即可自动完成;
60.所述主从采样,从机械臂运动到设定位置时,由医生按下主从同步采样动作按键,主控制器向从控制器发送主从同步采样信号,控制主机械臂运动实现从机械臂同步运动;此过程实现对被测人员的采样;
61.所述采样同步按键,采样同步动作为点动控制,到达预设位置后医生按下同步按键实现主从姿态同步,松开采样同步按键主从机械臂同时保持当前位姿等待主从同步采样信号;
62.请参阅图3,图中s10、s20、s30、s40、s50、s60为从机械臂串行总线舵机,s100、s200、s300、s400、s500、s600为主机械臂串行总线舵机;主机械臂与从机械臂的结构大小为1:n,n为正整数;
63.请参阅图4,所述交互界面,由led触摸屏、按键组成;led触摸屏可选择并显示当前模式、设置操作步骤,设置位置坐标等;操作按键由夹持、松开、结束、确定、旋钮开关组成。
64.由此可见本发明提出的一种主从式咽拭子采样机器人控制系统可读取不同状态下主机械臂信息并操作从机械臂运动,可进行拭子采样条的“快速预定位
→
主从同步操作采样
→
快速放回”;对医护人员起到防护作用,使采样过程更加快捷安全。
65.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。