技术特征:
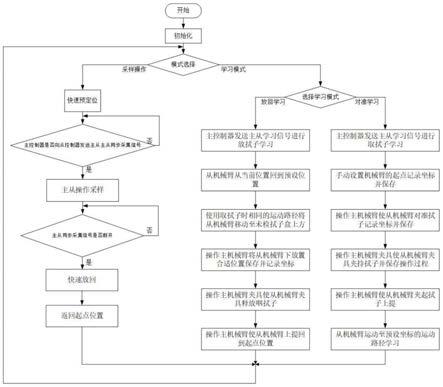
1.一种主从式咽拭子采样机器人控制系统,其特征在于,包括:六自由度主机械臂和主操作手柄、六自由度从机械臂和拭子夹、主控制器、从控制器、主从学习、主从同步采样和交互界面;主从学习模式包括“对准操作”和“放回操作”两个过程的学习;主从学习模式下,操作主机械臂动作,主控制器会将主机械臂各关节转角信息传送给从控制器,从控制器按照接收到的关节转角信息控制从机械臂运动,每按一次“学习”按钮,即可记录一组当前各个关节转角信息和拭子夹状态信息,达到主从学习的目的;在操作模式下,用拇指按一下“对准操作”按扭,从机械臂按照学习过的“对准操作”程序,自动完成对准操作过程,把拭子送到口腔前面的预定位置;然后,用食指按住“同步采样”按钮,同时操作主机械臂动作,从机械臂同步动作,完成从口腔采样;从口腔采样后,松开“同步采样”按钮,用拇指按一下“放回操作”按钮,从机械臂按照学习过的“放回操作”程序,自动完成放回操作过程,把采样后的拭子送回到指定位置,等待下次操作循环;最终实现“快速预定位
→
主从同步操作采样
→
快速放回”过程。2.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述六自由度主机械臂和主操作手柄与六自由度从机械臂和拭子夹,主机械臂由6个串行总线舵机组成关节部分,通过操作主机械臂前端的手柄来控制主从机械臂的运动;从机械臂由6个串行总线舵机组成关节部分。3.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述主控制器,串行总线舵机通过串口发送指令将当前的位置角度信息反馈给stm32主控制器;主控制器记录并保存设置的位置坐标。4.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述从控制器,从控制器为stm32,当接收到主控制器发送的位置角度信息从控制器控制对应的舵机旋转相应的角度。5.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述主从学习,医生选择主从学习模式控制主机械臂运动,主控制器向从控制器发送主从学习信号将主机械臂标定的位置角度信息传达给从控制器;从控制器接收到主从学习信号后处理各个关节位置角度信息控制从机械臂运动;并通过从控制器学习并记录各个关节的位置角度信息及坐标值,达到主从学习的目的;并在从机械臂学习主机械臂动作后自动运行已学习的动作。6.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述学习及保存分为对准学习、放回学习;对准过程:步骤一:医生按下同步采样键操纵主机械臂设置从机械臂的起点坐标s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60);步骤二:控制从机械臂从未检拭子盒中对准咽拭子采样条坐标为s10(x11,y11,z11)、s20(x21,y21,z21)、s30(x31,y31,z31)、s40(x41,y41,z41)、s50(x51,y51,z51)、s60(x61,y61,z61);步骤三:控制从机械臂夹持咽拭子采样条坐标为s10(x12,y11,z12)、s20(x22,y22,z22)、s30(x32,y32,z32)、s40(x42,y42,z42)、s50(x52,y52,z52)、s60(x62,y62,z62);
步骤四:向上夹起咽拭子采样条移动到坐标s10(x13,y13,z13)、s20(x23,y23,z23)、s30(x33,y33,z33)、s40(x43,y43,z43)、s50(x53,y53,z53)、s60(x63,y63,z63);步骤五:在从机械臂向上夹起咽拭子采样条后,至运动到预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60)过程中标定3个运动坐标组分别为:s10(x14,y14,z14)、s20(x24,y24,z24)、s30(x34,y34,z34)、s40(x44,y44,z44)、s50(x54,y54,z54)、s60(x64,y64,z64)。s10(x15,y15,z15)、s20(x25,y25,z25)、s30(x35,y35,z35)、s40(x45,y45,z45)、s50(x55,y55,z55)、s60(x65,y65,z65)。s10(x16,y16,z16)、s20(x26,y26,z26)、s30(x36,y36,z36)、s40(x46,y46,z46)、s50(x56,y56,z56)、s60(x66,y66,z66);使得从机械臂的运动过程在一个安全空间内;对准的过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行对准操作时,仅需按下对准键即可自动完成。7.根据权利要求6所述的主从式咽拭子采样机器人控制系统,其特征在于,所述放回学习为:步骤一:完成对被测人员采样后医生控制主机械臂使从机械臂移动至安全区域松开同步采样按键,从机械臂自动运动至预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60);步骤二:经由已标定的3个运动组坐标运动至已检拭子盒上方坐标为s10(x17,y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67);步骤三:向下运动至s10(x18,y18,z18)、s20(x28,y28,z28)、s30(x38,y38,z38)、s40(x48,y48,z48)、s50(x58,y58,z58)、s60(x68,y68,z68)松开夹具放下拭子;步骤四:再向上运动至坐标为s10(x17,y17,z17)、s20(x27,y27,z27)、s30(x37,y37,z37)、s40(x47,y47,z47)、s50(x57,y57,z57)、s60(x67,y67,z67)后回到起点s10(x10,y10,z10)、s20(x20,y20,z20)、s30(x30,y30,z30)、s40(x40,y40,z40)、s50(x50,y50,z50)、s60(x60,y60,z60)以便下次采样操作;放回的过程所经历的位置坐标均保存在主控制器和从控制器内,当需要进行放拭子操作时,仅需按下放回键即可自动完成。8.根据权利要求6所述的主从式咽拭子采样机器人控制系统,其特征在于,所述预设位置s10(xp10,y p10,z p10)、s20(xp20,y p20,z p20)、s30(xp30,y p30,z p30)、s40(xp40,y p40,z p40)、s50(xp50,y p50,z p50)、s60(xp60,y p60,z p60)称为危险空间,为被测人员口腔上方。9.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述主从采样,从机械臂运动到设定位置时,由医生按下主从同步采样动作按键,主控制器向从控制器发送主从同步采样信号,控制主机械臂运动实现从机械臂同步运动;此过程实现对被测人员的采样。
10.根据权利要求1所述的主从式咽拭子采样机器人控制系统,其特征在于,所述采样同步按键,采样同步动作为点动控制,到达预设位置后医生按下同步按键实现主从姿态同步,松开采样同步按键主从机械臂同时保持当前位姿等待主从同步采样信号;所述交互界面,由led触摸屏、按键组成;led触摸屏可选择并显示当前模式、设置操作步骤,设置位置坐标等;操作按键由夹持、松开、结束、确定、旋钮开关组成。
技术总结
本发明公开了一种主从式咽拭子采样机器人控制系统,包括:六自由度主机械臂和主操作手柄,六自由度从机械臂和拭子夹,主控制器,从控制器,主从学习,主从同步采样,交互界面;主从学习模式包括“对准操作”和“放回操作”两个过程的学习;在主从学习模式下,操作主机械臂动作,主控制器会将主机械臂各关节转角信息传送给从控制器,从控制器按照接收到的关节转角信息控制从机械臂运动;本发明,通过采样机器人进行采样,避免了人工进行咽拭子采样时取样人员与被检测人员面对面的情况,有效降低了取样者感染的风险;同时,通过使用机器人控制系统代替人工取样,使得采样更加稳定和准确,避免人工操作不当引起干呕的情况。免人工操作不当引起干呕的情况。免人工操作不当引起干呕的情况。
技术研发人员:陈富安 邓遵义 任胜杰 李苏阳 侯玉杰 张春霖
受保护的技术使用者:河南工业大学
技术研发日:2021.08.18
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。