1.本发明属于汽车技术领域,具体涉及一种四轮转向带差速车辆的最小转弯半径的仿真方法。
背景技术:
2.最小转弯半径表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力。而跟转弯半径直接相关的汽车操纵稳定性则直接关系到汽车的行驶安全,早已成为衡量现代汽车的主要性能之一。最小转弯半径在汽车研发初期会作为一个非常重要的指标来进行考量,对于传统的前轮或单轴转向车,一般通过理论公式计算即可得出最小转弯半径,但是对于其他车型,如中高级车上带的一些四轮转向甚至是包括差速在内,现有技术中尚没有统一的公式供设计人员使用,其仿真层面的工作也未见有相关研究。
技术实现要素:
3.发明目的:针对现有技术的不足,本发明提出一种车辆的最小转弯半径的仿真方法,用来计算四轮转向和带差速控制策略车辆的最小转弯半径。
4.技术方案:一种四轮转向带差速车辆的最小转弯半径的仿真方法,包括以下步骤:
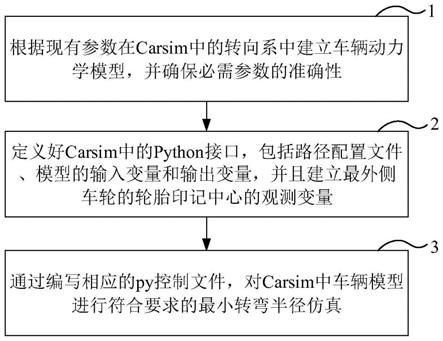
5.根据现有参数在carsim中的转向系中建立车辆动力学模型,并确保必需参数的准确性;
6.定义好carsim中的python接口,包括路径配置文件、模型的输入变量和输出变量,并且建立最外侧车轮的轮胎印记中心的观测变量;
7.通过编写相应的py控制文件,对carsim中车辆模型进行符合要求的最小转弯半径仿真。
8.作为优选实施方式,所述必需参数包括:轴距、轮距、内轮转角、外轮转角、后轮转角、扭矩控制策略。
9.作为优选实施方式,所述扭矩控制策略包括:操纵方向盘向一侧转动至最大位置,观察此时车辆的转弯行驶情况,向转弯侧后轮施加制动力控制滑移率在给定范围,同侧前轮随动,另一侧两轮增加驱动力使滑移率在给定范围。
10.作为优选实施方式,滑移率给定范围为0.1
‑
0.15。
11.作为优选实施方式,所述根据现有参数在carsim中的转向系中建立车辆动力学模型包括:在carsim中引入后轮转向系统,并对后轮转向系统进行区别于前轮转向系统的重新定义。
12.作为优选实施方式,在后轮转向系统中,对齿轮齿条比、转向系k特性、转向柔度和摩擦力矩方向上与前轮转向系统进行区别。
13.作为优选实施方式,所述模型的输入变量包括四个车轮的实际转角、四个轮缸压力输入和四个轮端的扭矩,模型的输出变量包括车速、质心位置、车轮转角、侧向加速度和四个车轮的滑移率和最外侧车轮轮胎印记中心。
14.作为优选实施方式,进行最小转弯半径仿真时,通过调出cmd中python文件的执行命令,并给定车辆模型一个固定车速,运行后观测最小转弯工况下的动画效果和自定义的结果输出,根据最外侧车轮的轮胎印记中心到转向中心的距离得到最小转弯半径。
15.有益效果:
16.本发明充分利用了carsim自带的python接口,根据最大内外轮转角、后轮转角、扭矩控制策略,通过调用carsim车辆的输入变量,将carsim车辆动力学模型、四轮转向、扭矩控制策略和python接口控制程序有效地连接在了一起,实现了通过carsim外接python的接口控制有效实现了四轮转向和控制策略的仿真。
17.本发明设计的通过carsim自身四轮转向模型以及python外接接口,引入最外轮轮胎印记中心轨迹来进行最小转弯半径观测的方法,相较于其他方法,比如公式法或者引入全局最小转弯半径变量法要更为快速准确。
附图说明
18.图1为汽车最小转弯半径和通道宽度的示意图;
19.图2为根据本发明实施例的车辆最小转弯半径的仿真方法流程图;
20.图3为根据本发明实施例的最小转弯半径仿真中四轮扭矩的控制策略流程图;
21.图4为根据本发明实施例的carsim中四轮转向系参数设置示意图;
22.图5为根据本发明实施例的carsim中为最小转弯半径仿真定义的python接口示意图;
23.图6为根据本发明实施例的输入输出变量接口示例;
24.图7为根据本发明实施例的python接口中输入变量的定义示例;
25.图8为根据本发明实施例的carsim中外接python的接口文件路径示例;
26.图9为根据本发明实施例的carsim中右前轮印记中心轨迹变量的定义示例;
27.图10为根据本发明实施例的右前轮轮胎印记中心的轨迹示意图;
28.图11为根据本发明实施例的carsim最小转弯半径仿真中的工况设置示例;
29.图12为根据本发明实施例的最小转弯控制仿真效果图。
具体实施方式
30.下面结合附图对本发明的技术方案作进一步说明。
31.汽车最小转弯半径(minimumturn radius of car)是指当转向盘转到极限位置,汽车以最低稳定车速转向行驶时,外侧转向轮的(铅直)中心平面在支承平面上滚过的轨迹圆半径,即离圆心最远的那个轮子所走出的圆的半径,如图1示。它在很大程度上表征了汽车能够通过狭窄弯曲地带或绕过不可越过的障碍物的能力。
32.在传统车开发过程当中,一般在设计初始阶段就会根据市场需求和总布置提出的方案进行最小转弯半径的理论计算,由于大多数都是前轮两驱车型,一般采用如下的计算公式:
33.以转向轮外轮中心轮迹计算:
[0034][0035]
或者以车身最外点计算:
[0036][0037]
式中,r0为转向轮外轮中心轮迹的最小转弯半径;r为车身最外点的最小转弯半径;l为轴距;θ
max
为转向轮外轮最大转角;b为前轮距;c为前悬长度;k为整车宽度;m为主销中心距。
[0038]
而对于带四轮转向的汽车,现有的书籍和文献中尚找不到固定的公式来进行计算。一般而言,直接计算有两种途径:1、将四轮车辆等效成两轮车的模型来计算,可以参考“汽车底盘基础(德)耶尔森.赖姆帕尔著张洪欣余卓平译科学普及出版社1992年9月第一版”中转向系设计部分的内容;2、通过计算瞬时转向中心几何位置,然后算出最外轮到中心的距离来得出四轮转向车的最小转弯半径,可以参照“车辆四轮转向系统的控制方法,郭孔辉轧浩,吉林工业大学学报vol.28总第27期”一文中的方法。
[0039]
这种公式计算四轮转向转弯半径的方法做了简化和近似,且没有考虑到轮胎的侧偏特性以及转向系的柔度等因素在内,所以精确度并不高。如果再加上四轮驱动控制策略等就无法直接进行计算了。因此,一种快速准确的四轮转向带差速车的最小转弯半径的仿真计算方法就显得尤为必要。
[0040]
本发明提出一种快速利用carsim和python联合仿真的方法,主要用来仿真带四轮转向和差速功能车的最小转弯半径。本发明基于carsim2018版本以后自带的python外接接口,首先是根据现有参数建立好车辆动力学模型,这里的一些影响转弯半径比较大的因素是必须准确无误的;其次把可控的输入输出变量在python接口中定义好,比如转角和四轮扭矩控制等;最后根据实际的最大转角和扭矩控制策略,通过在程序自带的py控制文件基础上进行编辑输入数值,再通过编辑cmd文件来调用。参照图2,本发明的仿真方法具体包括以下步骤:
[0041]
步骤1:建立好车辆动力学模型,确保必需参数的准确性。
[0042]
为了能够输出准确的转弯半径的结果,首先需要建立好车辆动力学模型,确保必需参数的准确性。经过研究,为了保证转弯半径仿真结果准确性,以下参数是必需的:轴距、轮距、转角、扭矩的控制策略,下面表1中以某e级suv车为例:
[0043]
表1最小转弯半径仿真必需基本参数
[0044][0045]
从左至右分别是:最大内外轮转角、轴距、轮距、主销偏置距和后轮最大转角。这些
数据可以根据设计人员提供的实车参数信息或者预研车型所需要考察的设计参数信息得到。为了进一步减小转弯半径,这里还需要加入四轮扭矩的控制策略,如图3所示为四轮扭矩控制策略的一个示例,以左转为例,首先方向盘向左转到最大位置处,俗称向左打死,观察此时车辆的转弯行驶信息,通过左后轮施加制动力使滑移率在一定范围,左前轮随动,右侧两轮增大驱动力使滑移率满足要求。扭矩控制策略是负责整车设计和电机控制策略开发人员为了进一步减小最小转弯半径而提出的一种有效的控制策略,左打死是为了让车辆的转向性能发挥到极限,一般最小转弯半径会测左转和右转两种工况,如果是测右转则是右打死。为了保证车辆行驶稳定性和轮胎足够的抓地力一般要设定滑移率在一定范围内,这里考虑0.1
‑
0.15。观察结果包括车辆轨迹、滑移率、车速、轮胎垂向力、测量力等,是为了保证前述的车辆稳定性效果和转弯轨迹是否正确等。
[0046]
另外,关于四轮转向模型的建立需要在carsim中的转向系里面进行重新设计。引入四轮转向系统后,由于前后轮分别存在相互独立的转型系统,需要对后轮转向系统进行区别于前轮转向系统的重新定义,这里尚处于设计阶段所以可以依据底盘转向设计人员提供的参数进行填写。以e级车转向为例,引入后轮转向模型,考虑前后轮之间的差异,需对参数稍作修正,在齿轮齿条比、转向系k特性、转向柔度和摩擦力矩方向上进行区别,主销默认相同,如图4所示。至于其他的参数,如悬架kc、制动、轮胎等,并不对转弯半径的仿真结果具有直接影响,采用默认e级suv车型的参数即可。
[0047]
步骤2:定义好carsim中的python接口,并且定义好观测变量。
[0048]
在建立好符合转弯半径仿真要求的车辆模型之后,需要对carsim的外接python接口和观测变量进行定义。如图5所示,首先在carsim2019的接口定义模块,也就是处理模块中选择models中的self
‑
contained solvers,调出系统自带的python接口文件,重新复制命名为zxzw,然后点击进去进行输入输出变量的设置。
[0049]
图6是输入输出变量接口示例。在这里,根据步骤1中转角、轮缸制动力矩输入、四轮扭矩控制策略,只需要定义好输入接口import channels即可,这里可以命名为zxzw;因为carsim中没有现成的最小转弯输出或者观测变量,这里的输出接口export channels可以直接用python接口自带的四轮转向four
‑
wheel steering的输出,后面重新建立后处理变量。也可以根据需要重新定义。
[0050]
参照图7,输入变量的设置主要包括四个车轮的实际转角、四个轮缸压力输入和四个轮端的扭矩,这里加入轮缸压力输入是为了保证步骤1中对滑移率的要求。注意名称和物理量需要对应起来,数值大小由下述的外接py文件来进行控制。
[0051]
最后,需要在external wrapper program外接程序当中指定好接口文件的路径,接口路径文件可以通过记事本进行编辑,主要是指定python可执行程序的安装路径和对应的转弯半径仿真的py控制文件路径,在这里就不赘述。图8给出了carsim中外接python的接口文件路径示例。
[0052]
另外,上面提到的最小转弯半径不能直接观测,还需要建立一个最外侧轮子的轮胎印记中心轨迹的变量。以左转为例,可以通过仿真结果看到右前轮是最外侧的车轮。这样,就需要引入右前轮轮胎印记中心的观测变量,如图9所示。在后处理模块中加一条plot曲线,命名为tire y vs x
‑
trajectory,点击进去,输入xctc_r1,yctc_r1(分别表示左转工况下需要观测的右轮(外侧车轮)的x和y轨迹坐标)保存即可。
[0053]
步骤3:通过py文件对carsim模型进行转弯工况的控制。
[0054]
在明确好逻辑和定义好python接口和观测变量之后,下面进行对应的py控制文件的编写。carsim2019的python接口程序demo中有一个名为steer controller with python的py控制文件(一般在carsim工作目录的\extensions\custom_py文件夹下面),可以基于该文件进行修改。
[0055]
根据步骤1中的转角和控制策略的要求,输入整个输入变量组import_array=[37.73,32.35,
‑
5,
‑
5,0,0,15,0,600,600,600,600],以此来调用对应carsim的python外接接口中所控制的量,共12个:四个车轮的实际转角、四个轮缸压力输入和四个轮端的扭矩。py控制文件的示例如下所示:
[0056]
#copy values for 3variables that the vs solver will import
[0057]
import_array=[gainstr*(lattrack
‑
road_l),#this has units of deg
[0058]
x_preview,
[0059]
y_preview]
[0060]
#call the vs api integration function
[0061]
import_array=[37.7267,32.3494,
‑
5,
‑
5,0,0,15,0,600,600,600,600]
[0062]
#import_array=[27,27,27,27]
[0063]
status,export_array=vs.integrateio(t_current,import_array,export_array)
[0064]
上述代码中最关键的是py文件外接的api接口中的整合函数:import_array=[37.7267,32.3494,
‑
5,
‑
5,0,0,15,0,600,600,600,600],对应前述步骤2中的输入变量,以左转弯为例,其中从左向右前四个变量分别为左前、右前、左后、右后轮实际转角,中间四个变量分别为左前、右前、左后、右后轮缸压力,最后四个变量分别为左前、右前、左后、右后轮制动扭矩;其他段代码均为carsim2019外接python接口中的steer_control.py中的默认代码。
[0065]
此处输入
‑
5是因为四轮转向中后轮跟前轮一般是反向转的,这样才能减小转弯半径和提供操作稳定性;15是经过调试优化的为使左后轮滑移率稳定在0.1
‑
0.15的合适制动力矩大小;四个600是同时按照仅左后轮给制动,右侧两轮给驱动做了,但增加了左侧两轮驱动,py文件里面的import_array中的0,0,15,0就表示仅左后轮全力制动,为了保证输出的左右的滑移率均保持在0.1
‑
0.15之间。
[0066]
最后给定车辆模型一个固定车速,一般是较低速度,这里给了8km/h,运行后观测右前轮轮胎印记中心的轨迹结果如图10所示。此时可以读出右前轮轮胎印记中心圆圈(内圆)处的直径为11.026m,根据最小转弯半径的定义,此处的最外侧车轮印记到转向中心的距离即可代表最小转弯半径,即加上了四轮转向和步骤1中控制策略的e级suv车型的最小转弯半径为11.026/2=5.513m。
[0067]
本发明提出了一种利用carsim自身四轮转向系统模型和自带python外接接口相结合的方法,通过引入最外轮轮胎印记中心轨迹来观测进行计算最小转弯半径的方法。本发明首先需要确认好影响最小转弯半径的基本参数输入,保证其准确;然后根据所需控制的量定义好carsim中的python接口,包括路径配置文件和模型的输入输出等;最后通过编写或者修改py控制文件,来对carsim车辆模型进行符合要求的最小转弯半径仿真。其中,需
要注意的是最外侧轮印记判断最小转弯轨迹的确定,为满足最小转弯半径的仿真效果,需要自行设置为较广阔平坦的路面,以1km广场为例,初始车速按照实际需要(一般为较低速),仿真时间保证车辆跑完一圈即可,工况设置如图11所示。这里内置的plot setup也可以根据具体的需要来进行修改,如前面图9中引入的右前印记中心也可以加在此处,加入了框中代表的四个轮子的滑移率输出。
[0068]
最后的仿真操作通过点击run math model,调出cmd中python文件的执行命令,待运行完之后可以观看最小转弯工况下的动画效果和自定义的结果输出。所有变量的输出结果如图12所示。图中的仿真结果中包括了车速、质心位置、车轮转角、侧向加速度和自定义的四个车轮的滑移率和右前轮的轮胎印记中心轨迹。其中通过滑移率可以观测和调整制动和扭矩分配以满足步骤1中控制策略的具体需求。而从左边的动画也可以看出:右前轮即为此左转打死工况下的最外侧车轮。按照相关标准和规定,该工况下引入右前轮的轮胎印记中心就能够代表最小转弯半径的轨迹。汇总表1中多轴距变化下的输入,可得到如下的仿真结果:
[0069]
表2多轴距输入下的最小转弯半径仿真结果
[0070][0071]
可以看出:轴距的影响较大,3100mm轴距情况下采用5度后轮转向和扭矩控制策略是可以有效减小转弯半径的。仿真结果比简化公式结果(根据前述“车辆四轮转向系统的控制方法,郭孔辉轧浩,吉林工业大学学报vol.28总第27期”一文所构建的公式)要略大一点,这是因为简化公式没有考虑到转向系柔度和轮胎侧偏等影响,只有2自由度,而carsim是28自由度的多体动力学专业软件,包含各种子系统,考虑得更全面,所以精确度也会更高。
[0072]
本发明设计了一种高效的通过carsim和python的联合仿真方法,来计算四轮转向和带差速控制策略车辆的最小转弯半径。经验证,在确保车辆基本参数和关键零部件参数准确的情况下,该仿真方法的精确度较高,可以用来在车企和自动驾驶设计公司研发设计高级车辆中使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。