1.本发明涉及一种深空天体附近引力场局部快速建模方法,尤其涉及适用于小行星附近引力场局部快速建模方法,属于航空航天技术领域。
背景技术:
2.引力场建模是实现小行星探测的关键技术,在小行星探测任务中具有重要的应用价值。由于小行星的形状不规则性质与密度不均匀特性,小行星附近引力场通常呈强非线性特征。一方面,如何对小行星附近的强非线性引力场进行建模,获得适用于实际探测任务的具备较高精度的引力场数学模型是需要解决的难点;另一方面,为了提高实际小行星探测任务的安全性和可靠性,如何实现小行星附近引力场的快速建模,以应对探测任务中的突发事件也是需要解决的关键问题。小行星附近引力场建模是当前科技人员关注的热点问题之一。
3.在已发展的小行星附近引力场建模方法中,在先技术[1](werner,r.a.,“the gravitational potential of a homogeneous polyhedron or don’t cut corners,”celestial mechanics and dynamical astronomy,1993),针对小行星附近引力场建模问题提出了多面体建模方法,其使用一系列空间多面体网格将小行星进行离散,进而获得数值求和形式的小行星多面体引力场。该方法的优点是计算精度较高,所获得的小行星附近引力场在很多实际任务中进行了验证。同时,该方法需要较大的计算量,计算效率较低,难以适用于具备小行星附近引力场快速计算的实际小行星探测任务中。
[0004]
在先技术[2](herrera,s.e.,palmer,p.l.,and roberts,r.m.,“modeling the gravitational potential of a nonspherical asteroid,”celestial mechanics and dynamical astronomy,2013),针对小行星附近引力场建模问题,提出了球谐与bessel引力场建模方法,选取参考球面,对于球面外引力场采用球谐函数建模方法,对于球面内引力场采用bessel函数建模方法。该方法的优点是,相比于多面体模型,能够提升引力场计算效率,缺点是该方法建模精度较低,难以适用对轨道精度需求较高的小天体探测任务。
技术实现要素:
[0005]
为解决现有方法进行小行星附近引力场建模时经常出现的难以兼顾计算效率与精度的问题,本发明公开的一种不规则形状小天体引力场高效建模方法的目的是:实现小行星附近引力场局部快速建模,在保证建模精度前提下,提高小行星附近引力场建模计算效率,解决小行星附近引力场应用相关技术问题。所述技术问题包括提高小行星附近轨迹规划效率。
[0006]
本发明的目的是通过下述技术方案实现的:
[0007]
本发明公开的一种不规则形状小天体引力场高效建模方法,根据小行星特性与期望建模区域选定建模任务区,对任务区域内整个空间进行离散化处理,将连续的三维空间离散为一系列微小的三棱锥空间。在每个三棱锥内,通过计算顶点处的二体引力加速度并
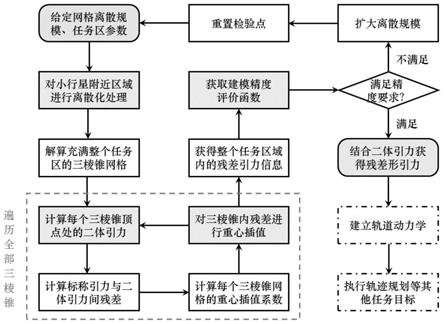
与标称引力加速度作差,获取顶点处的引力场残差数据。在此基础上,通过重心插值获得三棱锥内部区域的引力场残差线性表达形式。对任务区域内全部的三棱锥进行遍历计算,将整个任务区内的引力场残差数据转化为网格判断约束与线性插值形式。将得到的引力场参数与二体引力加速度求和,得到基于网格判断的局部线性引力场。最后,通过迭代给定该线性引力场的空间离散尺度,计算满足精度要求的空间网格离散规模,获得满足精度要求的小行星附近局部引力场模型。该引力场可以回避传统建模方法中大量的数值计算,在满足任务需求下大幅度提升引力场建模的效率,进而解决小行星附近引力场应用相关技术问题。所述技术问题包括提高小行星附近轨迹规划效率。
[0008]
本发明公开的一种不规则形状小天体引力场高效建模方法,包括如下步骤:
[0009]
步骤一,对小行星附近区域进行离散化处理,获得一系列空间离散的三棱锥网格。
[0010]
定义小行星附近任务区域为一个正六面体,表示为ω,该六面体边界由六个特征参数表示,分为为最大x轴坐标r
xmax
、最小x轴坐标r
xmin
、最大y轴坐标r
ymax
、最小y轴坐标r
ymin
、最大z轴坐标r
zmax
、最小z轴坐标r
zmin
。
[0011]
分别给定三轴方向上的网格离散点数,x轴离散点数n
x
、y轴离散点数n
y
、z轴离散点数n
z
,将区域ω划分为一系列小正六面体网格,该小网格表示为ω
j
[0012]
ω
j
:=[r
x,i
,r
x,i 1
]
×
[r
y,i
,r
y,i 1
]
×
[r
z,i
,r
z,i 1
],j=1,2,...,(n
x
‑
1)
·
(n
y
‑
1)
·
(n
z
‑
1)
[0013]
其中:q
j
表示第j个正六面体网格。
[0014]
对于每个小正六面体,将其划分为若干个三棱锥。
[0015]
为了降低离散的网格数,进而提高计算效率,作为优选,对于每个小正六面体,将其划分为五个体积不等的三棱锥。
[0016]
对于每个小正六面体,将其划分为五个体积不等的三棱锥,于是得到n
s
=5
·
(n
x
‑
1)
·
(n
y
‑
1)
·
(n
z
‑
1)个三棱锥网格,于是任务区域ω就可以表示为
[0017][0018]
步骤二,在每个离散的三棱锥网格顶点处计算二体中心引力加速度,并与标称引力场作差获得引力场的线性残差形式。
[0019]
定义三棱锥内任意一点的位置矢量为r
k
,首先计算该点处的引力加速度。计算在该点处的二体引力加速度并与标称引力加速度作差,获得引力场的线性残差表达形式为
[0020][0021]
其中:σ(r
k
)表示三棱锥θ
k
区域内点r
k
处关于中心二体引力的残差,表示点r
k
处的二体引力加速度,其具体形式为
[0022][0023]
其中:μ
ast
表示通过观测得到的小行星中心二体引力常数。
[0024]
获得每个三棱锥顶点的引力场残差形式
[0025][0026]
步骤三,对每个三棱锥顶点的残差数据进行线性重心插值,获得整个任务区域内的引力场线性表达形式。
[0027]
三棱锥每个顶点处引力场残差数据表示为{σ(r1),σ(r2),σ(r3),σ(r4)}。
[0028]
定义重心插值坐标与三维空间直角坐标系的转换系数{α1,α2,α3,α4},将引力场残差改写为如下重心坐标形式
[0029]
σ(r
k
)=α1σ(r1) α2σ(r2) α3σ(r3) α4σ(r4)
[0030]
该坐标系的系数满足如下关系
[0031][0032]
于是可以反解得转换系数{α1(r
k
),α2(r
k
),α3(r
k
),α4(r
k
)},代入重心坐标系下的引力场残差计算公式,得到三棱锥内任意一点的插值形式残差
[0033]
σ(r
k
)=α1(r
k
)σ(r1) α2(r
k
)σ(r2) α3(r
k
)σ(r3) α4(r
k
)σ(r4)
[0034]
遍历计算全部三棱锥网格,得到整个任务区域内的引力场,即ω区域内的引力场表示为
[0035][0036]
其中,r表示整个任务区域内任意一个点的空间三维位置坐标,矢量l,以及矩阵φ由如下公式计算得到。
[0037]
l=(r
t
,1)
t
[0038][0039][0040]
步骤四,逐次提升网格离散规模,计算小行星引力场建模精度,获取满足精度要求的小行星引力场,实现小行星附近引力场快速建模。
[0041]
定义任务区域内检测点集合为对于任意对应的标称引力场数据为对于给定的残差引力场模型,将该模型的建模精度定义为
[0042][0043]
其中:函数λ(r)表示由残差引力场模型输出的检测点r处的引力加速度,函数max{
·
}表示对集合内所有元素取最大值。
[0044]
给定空间网格的离散规模,表示为ρ=n
x
×
n
y
×
n
z
,通过上述步骤一至步骤三计算小行星引力场,进而获得空间网格建模精度,定义如下映射函数描述空间网格建模精度与网格离散规模的关系
[0045][0046]
其中,λ
ρ
表示在特定网格离散规模下的小行星附近引力场模型。
[0047]
给定容许建模误差ε,建模精度改进过程的迭代步长λ,初始网格离散密度ρ0,则在第i次迭代中,定义网格离散密度为
[0048]
ρ
i
=ρ0 λ
·
i
[0049]
通过映射函数,获得第i次迭代中的建模精度p(ρ
i
)。
[0050]
若该精度不满足需求,即p(ρ
i
)>ε,增大离散密度,进行下一次迭代。
[0051]
若该精度满足需求,即p(ρ
i
)≤ε,输出满足精度要求的小行星引力场模型λ
ρ
及相应离散化网格{θ
k
},即获取满足精度要求的小行星引力场,实现小行星附近引力场快速建模。
[0052]
还包括步骤五:根据步骤四获取满足精度要求的小行星引力场,解决小行星附近引力场应用相关技术问题。所述技术问题包括提高小行星附近轨迹规划效率。
[0053]
有益效果:
[0054]
1、本发明公开的一种不规则形状小天体引力场高效建模方法,首先根据小行星特性与期望建模区域选定建模任务区,对任务区域内整个空间进行离散化处理,将连续的三维空间离散为一系列微小的三棱锥空间。在每个三棱锥内,通过计算顶点处的二体引力加速度并与标称引力加速度作差,获取顶点处的引力场残差数据。在此基础上,通过重心插值获得三棱锥内部区域的引力场残差线性表达形式。对任务区域内全部的三棱锥进行遍历计算,将整个任务区内的引力场残差数据转化为网格判断约束与线性插值形式。将得到的引力场参数与二体引力加速度求和,得到基于网格判断的局部线性引力场模型。最后,通过迭代给定该线性引力场的空间离散尺度,计算满足精度要求的空间网格离散规模,获得满足精度要求的小行星附近局部引力场模型。本发明能够避免传统建模方法中大量的数值计算,在满足任务需求下大幅度提升引力场建模的效率。
[0055]
2、本发明公开的一种不规则形状小天体引力场高效建模方法,通过迭代给定该线性引力场建模方法的空间离散尺度,随机选取检测点计算任务区域内的建模精度,并通过逐次提升空间离散尺度以获取更高的建模精度,直至获得满足精度要求的小行星附近局部引力场模型。由于该模型的线性重心插值特性,在给定任意小的容许误差条件下,均能够找到合适的空间网格离散化规模,即能够保证引力场建模精度的前提下,显著提高小行星附近引力场建模效率。
附图说明
[0056]
图1为本发明公开的一种不规则形状小天体引力场高效建模方法流程图;
[0057]
图2为空间三棱锥网格离散化方法示意图;
[0058]
图3为空间三棱锥网格内引力场重心插值方法示意图;
[0059]
图4为不规则小行星附近引力场建模精度与网格离散规模关系仿真图。
[0060]
图5为引力场模型与多面体引力场模型计算效率对比
具体实施方式
[0061]
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
[0062]
实施例1:小行星1999kw4局部引力场快速建模
[0063]
如图1所示,本实施例公开的一种小行星附近引力场局部快速建模方法,选取小行星1999kw4进行引力场建模,具体步骤如下:
[0064]
步骤一,给定空间网格离散化规模,对小行星附近区域进行离散化处理,获得一系列空间离散的小正六面体网格。
[0065]
定义小行星附近任务区域为一个正六面体,表示为ω,该六面体边界由六个特征参数表示,分为为最大x轴坐标r
xmax
=1.27km、最小x轴坐标r
xmin
=0.37km、最大y轴坐标r
ymax
=1.24km、最小y轴坐标r
ymin
=0.35km、最大z轴坐标r
zmax
=0.83km、最小z轴坐标r
zmin
=0.33km。
[0066]
分别给定三轴方向上的网格离散点数,x轴离散点数n
x
=5、y轴离散点数n
y
=5、z轴离散点数n
z
=5,将区域ω划分为一系列小正六面体网格,该小网格表示为ω
j
[0067]
ω
j
:=[r
x,i
,r
x,i 1
]
×
[r
y,i
,r
y,i 1
]
×
[r
z,i
,r
z,i 1
],j=1,2,...,(n
x
‑
1)
·
(n
y
‑
1)
·
(n
z
‑
1)
[0068]
其中:ω
j
表示第j个正六面体网格。
[0069]
步骤二,给定任务区域内的小正六面体网格,对其进行进一步网格离散,获得一系列空间离散的小三棱锥网格。
[0070]
对于每个小正六面体,将其划分为五个体积不等的三棱锥,具体划分规则如图1所示,于是可以得到n
s
=5
·
(n
x
‑
1)
·
(n
y
‑
1)
·
(n
z
‑
1)=80个三棱锥网格,于是任务区域ω就可以表示为
[0071][0072]
步骤三,计算每一个小三棱锥网格顶点处的二体引力加速度。
[0073]
定义三棱锥内任意一点的位置矢量为r
k
,首先计算该点处的引力加速度。计算在该点处的二体引力加速度并与标称引力加速度作差,得到
[0074][0075]
其中:σ(r
k
)表示三棱锥θ
k
区域内点r
k
处关于中心二体引力的残差,表示点r
k
处的二体引力加速度,其具体形式为
[0076][0077]
其中:μ
ast
表示通过观测得到的小行星中心二体引力常数。
[0078]
步骤四,根据标称引力加速度数据,计算每个三棱锥网格顶点处的残差。
[0079]
选取三棱锥网格区域,定义为θ
k
,根数步骤一、步骤二所述方法,可以获得该三棱锥区域的四个顶点,表示为{r1,r2,r3,r4},根据标称引力场数据,获取在顶点处的引力加速度,分别定义为
[0080]
于是,可以计算得到该三棱锥的各顶点处的标称引力加速度相对于二体引力加速度的残差,表示为
[0081][0082]
步骤五,在每一个小三棱锥网格内,根据残差数据,计算该小三棱锥区域内的重心插值坐标。
[0083]
定义重心插值坐标与三维空间直角坐标系的转换系数{α1,α2,α3,α4},将引力场残差改写为如下重心坐标形式
[0084]
σ(r
k
)=α1σ(r
k
) α2σ(r
k
) α3σ(r
k
) α4σ(r
k
)
[0085]
该坐标系的系数满足如下关系
[0086][0087]
于是可以反解得转换系数{α1(r
k
),α2(r
k
),α3(r
k
),α4(r
k
)},代入重心坐标系下的引力场残差计算公式,得到,具体坐标系转换示意图如图2所示。
[0088]
步骤六,获得二体残差形式的小行星附近局部引力场模型。
[0089]
根据标称引力场数据,表示为以及如下计算公式
[0090][0091]
可以得到三棱锥的每个顶点处的残差数据,表示为{σ(r1),σ(r2),σ(r3),σ(r4)}。
[0092]
于是可以得到空间内任意一点的线性插值形式引力加速度
[0093][0094]
其中:σ(r
k
)表示三棱锥θ
k
区域内点r
k
处关于二体引力加速度的残差。
[0095]
进一步,可以得到三棱锥内部的线性残差形式引力场
[0096][0097]
步骤七,在每一个小三棱锥网格内,对顶点的残差数据进行重心插值,获得该区域内的线性引力场。
[0098]
定义重心插值坐标与三维空间直角坐标系的转换系数{α1,α2,α3,α4},将引力场改写为如下重心坐标形式
[0099]
σ(r
k
)={α1σ(r1),α2σ(r2),α3σ(r3),α4σ(r4)}
[0100]
该坐标系的系数满足如下关系
[0101][0102]
于是可以反解得转换系数{α1(r
k
),α2(r
k
),α3(r
k
),α4(r
k
)},代入重心坐标系下的引力场计算公式,得到,具体坐标系转换示意图如图2所示。
[0103]
σ(r
k
)={α1(r
k
)σ(r1),α2(r
k
)σ(r2),α3(r
k
)σ(r3),α4(r
k
)σ(r4)}
[0104]
步骤八,整合全部小三棱锥网格,获取整个任务区内的引力场模型。
[0105]
根据步骤七所述计算方法,遍历计算全部三棱锥网格,可以将整个任务区域内的引力场,即ω区域内的引力场表示为
[0106][0107]
其中,r表示整个任务区域内任意一个点的空间三维位置坐标,矢量l,以及矩阵φ由如下公式计算得到。
[0108]
l=(r
t
,1)
t
[0109][0110][0111]
步骤九,随机选取任务区内检验点,计算检验点处的引力加速度,获取该网格离散规模下的小行星附近引力场建模精度。
[0112]
定义任务区域内检测点集合为该集合内包含1000个随机检测点,对于任意
对应的标称引力场数据为对于给定的残差引力场模型,将该模型的建模精度定义为
[0113][0114]
其中:函数λ(r)表示由残差引力场模型输出的检测点r处的引力加速度,函数max{
·
}表示对集合内所有元素取最大值。
[0115]
步骤十,判断建模精度是否满足任务需求。
[0116]
将上述步骤一至步骤九计算过程视作为一个映射函数,该函数的输入为空间网格的离散规模,表示为ρ=n
x
×
n
y
×
n
z
,输出为空间网格建模精度,结合上述建模精度定义公式,得到如下映射函数
[0117][0118]
其中,λ
ρ
表示在特定网格离散规模下的小行星附近引力场模型。
[0119]
给定容许建模误差ε=1
×
10
‑9,建模精度改进过程的迭代步长λ=5,初始网格离散密度ρ0=5。通过建模精度计算式,可以获得第i次迭代中的建模精度p(ρ
i
)。
[0120]
若该精度满足需求,即p(ρ
i
)≤ε,执行步骤十一。
[0121]
若该精度不满足需求,即p(ρ
i
)>ε,增大离散密度,令
[0122]
ρ
i
=ρ0 λ
·
i
[0123]
重复步骤一至步骤十。
[0124]
步骤十一,输出步骤十中获得的小行星附近引力场模型。
[0125]
根据步骤十一,获得满足精度要求的网格离散化规模,定义其为ρ
m
=n
xm
×
n
ym
×
n
zm
。根据步骤一至九所述方法,获得引力场模型λ
ρ
及相应离散化网格{θ
k
}。
[0126]
步骤十二,根据步骤十一输出的引力场模型,建立小行星附近轨道动力学模型。
[0127]
根据1999kw4小行星参数,定义动力学参数,其中,自旋角速度ω=(0,0,6.31
×
10
‑4)
t
rad/s,构建如下动力学模型。
[0128]
if r∈θ
k
,then
[0129][0130][0131]
本实例计算所得1999kw4小行星附近引力场建模精度随网格离散化规模关系如图3所示,与多面体模型的计算效率对比如图4所示。
[0132]
步骤十三,根据步骤十二建立的小行星附近轨道动力学模型,提高小行星附近轨迹规划效率。
[0133]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。