1.本发明属于电子对抗技术领域,具体涉及一种基于神经网络算法的多功能雷达工作模式识别方法。
背景技术:
2.bp神经网络(back propagation neural network,bpnn)是指基于误差反向传播算法的多层前馈型神经网络。bp神经网络1986年由rumelhart和mcclelland提出,当即受到了广泛关注。作为当今最常见的、应用范围最广泛的神经网络模型之一,bp神经网络作为一种典型的误差信号反向传播算法,它将训练过程中计算的结果误差反馈到隐含层单元,进而改变权值系数完成对学习目标的预测,从而很好地解决了作为多层前馈神经网络处理非线性连续函数的权值收敛的问题。
3.现有的雷达工作模式识别方法不能通过神经网络算法进行识别,不能实现对实际测量的各个雷达信号的工作模式识别,为后续的雷达侦察识别工作提供有效信息,造价高,实用性差。现提出一种基于神经网络算法的多功能雷达工作模式识别方法。
技术实现要素:
4.本发明的目的在于提供一种基于神经网络算法的多功能雷达工作模式识别方法,以解决上述背景技术中提出的现有的雷达工作模式识别方法不能通过神经网络算法进行识别,不能实现对实际测量的各个雷达信号的工作模式识别,为后续的雷达侦察识别工作提供有效信息,造价高,实用性差的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于神经网络算法的多功能雷达工作模式识别方法,具体识别方法步骤如下:
6.步骤一:技术负责人进行识别方案会审,提出疑问并解答,技术人员编制专项识别方案和注意细节,并且向工作人员进行技术交底;
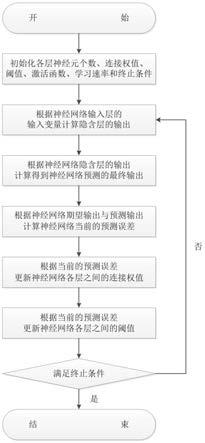
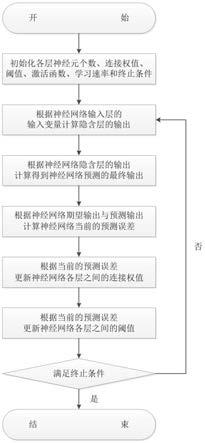
7.步骤二:初始化网络:神经网络的初始化需要确定输入层、隐含层以及输出层各层神经元的个数,还需要对输入层与隐含层、隐含层与隐含层、隐含层与输出层之间的连接权值和阈值进行赋值;
8.步骤三:信号的向前传播:在bp神经网络中,以只含有中间一层隐含层的神经网络为例,信号向前传播包括输入层到隐含层、隐含层到输出层之间的传播两个部分;
9.步骤四:误差的反向传播:首先要根据网络的期望输出与步骤三中网络预测输出计算当前网络的预测误差,根据计算的神经网络预测误差对网络中的连接权值和阈值分别进行更新;
10.步骤五:终止条件判断:判断是否满足初始化的bp神经网络终止条件,若不满足返回第二步继续迭代过程;
11.步骤六:工作人员对雷达工作模式的参数进行统计且工作模式的参数包括重复周期(μs)、中心频率(ghz)和脉冲占空比;
12.步骤七:按照上述指标,随机生成1000个包含重复周期、中心频率和脉冲占空比的雷达工作模式数据,并用重复周期和占空比的乘积作为雷达的脉宽信息,这样就得到了一组包含1000个随机生成的辐射源描述字(包含重复周期、中心频率和脉冲宽度)的原始数据集;
13.步骤八:考虑到雷达脉冲信号在传输过程中会出现脉冲丢失、同时还会受到周围其他电磁辐射源和地杂波、海杂波等环境因素的干扰,实际接收到的雷达脉冲信号的各个参数会与辐射源描述字的原始数据集略有不同,根据雷达的实际工作的性能指标和对外界电磁环境的综合评估,得到的雷达脉冲信号进行收集并记录,对实际测量的各个雷达信号的工作模式进行识别。
14.进一步的,所述步骤一中进行技术交底的交底资料应该双方签字后归档并且备案保存。
15.进一步的,所述步骤二中明确神经网络的神经元激励函数、学习速率以及bp神经网络训练停止的条件。
16.进一步的,所述步骤三中输入层到隐含层之间的传播即根据网络的输入层的输入变量计算隐含层的输出,同理,隐含层到输出层之间的传播即根据隐含层的输出计算得到神经网络预测的最终输出。
17.进一步的,所述步骤六中雷达工作模式包括全空域搜索模式、近程监视模式、近程跟踪模式、近程制导模式、远程监视模式、远程跟踪模式和远程制导模式。
18.进一步的,所述步骤八中对辐射源描述字中的参数做如下的噪声处理:(1)、重复周期:以原始数据集中的重复周期为数据中心,以0.02为标准差的高斯分布随机得到一个实际重复周期;(2)、中心频率:以原始数据集中的中心频率为数据中心,以
±
1mhz为偏差的均匀分布得到一个实际中心频率;(3)、脉冲宽度:以原始数据集中的脉冲宽度为数据中心,以0.01为标准差的高斯分布得到一个实际脉冲宽度。
19.进一步的,所述步骤五中对bp神经网络输入层与隐含层、隐含层与输出层之间的连接权值和阈值分别做随机初始化。
20.与现有技术相比,本发明的有益效果是:
21.(1)技术负责人进行识别方案会审,提出疑问并解答,技术人员编制专项识别方案和注意细节,并且向工作人员进行技术交底,使基于神经网络算法的多功能雷达工作模式识别方法井然有序,减小容错率,提高产品的质量。
22.(2)该识别方法解决目前市面上对多功能雷达工作模式识别的问题,利用多功能雷达各个工作模式的辐射源描述字,进行神经网络算法,从而实现对实际测量的各个雷达信号的工作模式识别,为后续的雷达侦察识别工作提供有效信息。
23.(3)该基于神经网络算法的多功能雷达工作模式识别方法,操作简单,硬件资源消耗极少,算法不涉及乘法和其他复杂运算,算法总体实现难度较低,精确度高,成本较低,实用性强,适合广泛推广使用。
附图说明
24.图1为本发明一种基于神经网络算法的多功能雷达工作模式识别方法流程图。
具体实施方式
25.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例一
27.如图1所示,一种基于神经网络算法的多功能雷达工作模式识别方法,具体识别方法步骤如下:
28.步骤一:技术负责人进行识别方案会审,提出疑问并解答,技术人员编制专项识别方案和注意细节,并且向工作人员进行技术交底;
29.步骤二:初始化网络:神经网络的初始化需要确定输入层、隐含层以及输出层各层神经元的个数,还需要对输入层与隐含层、隐含层与隐含层、隐含层与输出层之间的连接权值和阈值进行赋值;
30.步骤三:信号的向前传播:在bp神经网络中,以只含有中间一层隐含层的神经网络为例,信号向前传播包括输入层到隐含层、隐含层到输出层之间的传播两个部分;
31.步骤四:误差的反向传播:首先要根据网络的期望输出与步骤三中网络预测输出计算当前网络的预测误差,根据计算的神经网络预测误差对网络中的连接权值和阈值分别进行更新;
32.步骤五:终止条件判断:判断是否满足初始化的bp神经网络终止条件,若不满足返回第二步继续迭代过程;
33.步骤六:工作人员对雷达工作模式的参数进行统计且工作模式的参数包括重复周期(μs)、中心频率(ghz)和脉冲占空比;
34.步骤七:按照上述指标,随机生成1000个包含重复周期、中心频率和脉冲占空比的雷达工作模式数据,并用重复周期和占空比的乘积作为雷达的脉宽信息,这样就得到了一组包含1000个随机生成的辐射源描述字(包含重复周期、中心频率和脉冲宽度)的原始数据集;
35.步骤八:考虑到雷达脉冲信号在传输过程中会出现脉冲丢失、同时还会受到周围其他电磁辐射源和地杂波、海杂波等环境因素的干扰,实际接收到的雷达脉冲信号的各个参数会与辐射源描述字的原始数据集略有不同,根据雷达的实际工作的性能指标和对外界电磁环境的综合评估,得到的雷达脉冲信号进行收集并记录,对实际测量的各个雷达信号的工作模式进行识别。
36.其中,所述步骤一中进行技术交底的交底资料应该双方签字后归档并且备案保存。
37.其中,所述步骤二中明确神经网络的神经元激励函数、学习速率以及bp神经网络训练停止的条件。
38.其中,所述步骤三中输入层到隐含层之间的传播即根据网络的输入层的输入变量计算隐含层的输出,同理,隐含层到输出层之间的传播即根据隐含层的输出计算得到神经网络预测的最终输出。
39.其中,所述步骤六中雷达工作模式包括全空域搜索模式、近程监视模式、近程跟踪
模式、近程制导模式、远程监视模式、远程跟踪模式和远程制导模式。
40.其中,所述步骤八中对辐射源描述字中的参数做如下的噪声处理:(1)、重复周期:以原始数据集中的重复周期为数据中心,以0.02为标准差的高斯分布随机得到一个实际重复周期;(2)、中心频率:以原始数据集中的中心频率为数据中心,以
±
1mhz为偏差的均匀分布得到一个实际中心频率;(3)、脉冲宽度:以原始数据集中的脉冲宽度为数据中心,以0.01为标准差的高斯分布得到一个实际脉冲宽度。
41.其中,所述步骤五中对bp神经网络输入层与隐含层、隐含层与输出层之间的连接权值和阈值分别做随机初始化。
42.实施例二
43.如图1所示,一种基于神经网络算法的多功能雷达工作模式识别方法,具体识别方法步骤如下:
44.步骤一:技术负责人进行识别方案会审,提出疑问并解答,技术人员编制专项识别方案和注意细节,并且向工作人员进行技术交底;
45.步骤二:初始化网络:神经网络的初始化需要确定输入层、隐含层以及输出层各层神经元的个数,还需要对输入层与隐含层、隐含层与隐含层、隐含层与输出层之间的连接权值和阈值进行赋值;
46.步骤三:信号的向前传播:在bp神经网络中,以只含有中间一层隐含层的神经网络为例,信号向前传播包括输入层到隐含层、隐含层到输出层之间的传播两个部分;
47.步骤四:误差的反向传播:首先要根据网络的期望输出与步骤三中网络预测输出计算当前网络的预测误差,根据计算的神经网络预测误差对网络中的连接权值和阈值分别进行更新;
48.步骤五:终止条件判断:判断是否满足初始化的bp神经网络终止条件,若不满足返回第二步继续迭代过程;
49.步骤六:工作人员对雷达工作模式的参数进行统计且工作模式的参数包括重复周期(μs)、中心频率(ghz)和脉冲占空比;
50.步骤七:按照上述指标,随机生成1000个包含重复周期、中心频率和脉冲占空比的雷达工作模式数据,并用重复周期和占空比的乘积作为雷达的脉宽信息,这样就得到了一组包含1000个随机生成的辐射源描述字(包含重复周期、中心频率和脉冲宽度)的原始数据集;
51.步骤八:考虑到雷达脉冲信号在传输过程中会出现脉冲丢失、同时还会受到周围其他电磁辐射源和地杂波、海杂波等环境因素的干扰,实际接收到的雷达脉冲信号的各个参数会与辐射源描述字的原始数据集略有不同,根据雷达的实际工作的性能指标和对外界电磁环境的综合评估,得到的雷达脉冲信号进行收集并记录,对实际测量的各个雷达信号的工作模式进行识别。
52.其中,所述步骤一中进行技术交底的交底资料应该双方签字后归档并且备案保存;使基于神经网络算法的多功能雷达工作模式识别方法井然有序,减小容错率,提高产品的质量。
53.其中,所述步骤二中明确神经网络的神经元算法数据的历史曲线、学习速率以及bp神经网络训练停止的条件。
54.其中,所述步骤三中输入层到隐含层之间的传播即根据网络的输入层的输入变量计算隐含层的输出,同理,隐含层到输出层之间的传播即根据隐含层的输出计算得到神经网络预测的最终输出;利用多功能雷达各个工作模式的辐射源描述字,进行神经网络算法,从而实现对实际测量的各个雷达信号的工作模式识别,为后续的雷达侦察识别工作提供有效信息。
55.其中,所述步骤六中雷达工作模式包括全空域搜索模式、近程监视模式、近程跟踪模式、近程制导模式、远程监视模式、远程跟踪模式和远程制导模式;从不同的模式下进行数据收集,代表性强。
56.其中,所述步骤八中对辐射源描述字中的参数做如下的噪声处理:(1)、重复周期:以原始数据集中的重复周期为数据中心,以0.02为标准差的高斯分布随机得到一个实际重复周期;(2)、中心频率:以原始数据集中的中心频率为数据中心,以
±
1mhz为偏差的均匀分布得到一个实际中心频率;(3)、脉冲宽度:以原始数据集中的脉冲宽度为数据中心,以0.01为标准差的高斯分布得到一个实际脉冲宽度。
57.其中,所述步骤五中对bp神经网络输入层与隐含层、隐含层与输出层之间的连接权值和阈值分别做随机初始化;避免受其他数据信息的干扰,提高算法的精度。
58.本发明工作时:技术负责人进行识别方案会审,提出疑问并解答,技术人员编制专项识别方案和注意细节,并且向工作人员进行技术交底,使基于神经网络算法的多功能雷达工作模式识别方法井然有序,减小容错率,提高产品的质量。该识别方法解决目前市面上对多功能雷达工作模式识别的问题,利用多功能雷达各个工作模式的辐射源描述字,进行神经网络算法,从而实现对实际测量的各个雷达信号的工作模式识别,为后续的雷达侦察识别工作提供有效信息。该基于神经网络算法的多功能雷达工作模式识别方法,操作简单,硬件资源消耗极少,算法不涉及乘法和其他复杂运算,算法总体实现难度较低,精确度高,成本较低,实用性强,适合广泛推广使用。
59.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。