1.本公开涉及控制电池模块并平衡电池模块中包括的多个电池单体的技术。
2.本技术要求于2019年5月7日向韩国知识产权局提交的韩国专利申请no.10
‑
2019
‑
0053177和于2020年5月4日向韩国知识产权局提交的韩国专利申请no.10
‑
2020
‑
0053359的权益,其全部公开内容通过引用结合于此。
背景技术:
3.近来,对诸如笔记本电脑、摄像机和移动电话的便携式电子产品的需求急剧增加,并且随着电动车辆、储能蓄电池、机器人和卫星的广泛发展,正在对可重复地再充电的高性能二次电池进行许多研究。
4.目前,可商购的二次电池包括镍镉电池、镍氢电池、镍锌电池、锂二次电池等,并且其中,锂二次电池几乎没有或没有记忆效应,并且因此与镍基二次电池相比,它们获得了更多的关注,因为它们具有可以在方便的时候进行充电、自放电率非常低且能量密度高的优点。
5.在电动车辆应用中使用的电池组通常包括多个电池控制器和串联连接的多个电池模块。每个电池控制器监测和控制电池控制器管理的电池模块的状态。近来,为了满足对高容量高输出电池组的需求,电池组中包括的电池模块的数量也增加。为了有效地管理电池组中包括的每个电池模块的状态,公开了单主多从结构。单主多从结构包括:多个从控制器,该多个从控制器以一对一的关系提供给多个电池模块;以及主控制器,该主控制器控制多个从控制器的整体操作。主控制器被配置为经由无线信道与多个从控制器通信,从而提供无线电池控制系统。
6.每个从控制器可以被称为“电池控制器”,并且通常使用模块电压——即,跨与从控制器相对应的电池模块的电压——作为其工作功率。包括多个电池单体的电池模块的模块电压(例如,12v)远高于唤醒(激活)与对应电池模块相对应的从控制器所需的电压范围(例如,1.8至3.6v之间)的上限。因此,每个从控制器需要电源电路(例如,直流(dc)
‑
dc转换器),以将模块电压降低到唤醒从控制器所需的额定电压。
技术实现要素:
7.技术问题
8.本公开旨在提供一种利用从电池模块中的特定电池单体供应的电力来唤醒,从而使得能够无线传输模块信息而无需添加电源电路来将电池模块的模块电压转换为唤醒电池控制器所需的额定电压的电池控制器、无线电池控制系统和电池组。
9.本公开的这些和其他目的以及优点将通过以下描述来理解并且从本公开的实施例中将显而易见。此外,应当容易理解,本公开的目的和优点可以通过所附权利要求书及其组合中阐述的手段来实现。
10.技术方案
11.根据本公开的一方面的电池控制器用于一种电池模块,该电池模块包括正极端子、负极端子以及串联电连接在正极端子与负极端子之间的多个电池单体。电池控制器包括:电压测量单元,该电压测量单元被配置为生成指示多个电池单体中的每一个的单体电压的电压信号;以及控制模块,该控制模块可操作地耦合到电压测量单元。控制模块被配置为使用多个电池单体当中的最底部单体的第一单体电压作为用于操作控制模块的电力来唤醒。控制模块被配置为:当控制模块正在操作的同时,无线传输指示多个电池单体中的每一个的单体电压的感测数据。
12.控制模块包括:电力输入端子,该电力输入端子电连接到最底部单体的正极端子;以及参考端子,该参考端子电连接到最底部单体的负极端子。
13.电池控制器还可以包括保护电路,该保护电路电连接在最底部单体的正极端子与电力输入端子之间。保护电路可以被配置为将电力输入端子与参考端子之间的电压调节为等于或小于预定设定电压。
14.保护电路可以包括齐纳二极管,该齐纳二极管具有:第一端,该第一端电连接到最底部单体的正极端子;以及第二端,该第二端电连接到电力输入端子。
15.电池控制器还可以包括平衡电路,该平衡电路并联电连接到多个电池单体当中、除最底部单体以外的其余电池单体的串联单体电路。
16.控制模块可以被配置为基于串联单体电路中包括的至少一个电池单体的单体电压来确定参考单体电压。控制模块可以被配置为当参考单体电压高于第一单体电压时将平衡控制信号输出到平衡电路。平衡电路被配置为响应于平衡控制信号而形成用于串联单体电路的放电路径。
17.平衡电路可以包括放电电阻器以及放电开关,该放电开关串联连接到放电电阻器。放电开关响应于平衡控制信号而接通。
18.控制模块可以被配置为基于参考电压差来确定平衡控制信号的占空比,该参考电压差是通过从参考单体电压减去第一单体电压而获得的电压。
19.控制模块可以被配置为使用以下方程式1来确定占空比:
20.[方程式1]d
b_v
=δv1×
c1[0021]
在方程式1中,d
b_v
是占空比,δv1是参考电压差,并且c1是预定比例因子。
[0022]
电池控制器还可以包括电流传感器,该电流传感器被配置为生成指示从最底部单体的正极端子流向电力输入端子的电流的电流信号。控制模块可以被配置为进一步基于电流信号来确定平衡控制信号的占空比。
[0023]
控制模块可以被配置为基于电流信号来确定每个预定监测周期内最底部单体的放电容量。控制模块可以被配置为使用以下方程式2来确定占空比:
[0024]
[方程式2]d
b_vi
=(δv1×
c1)
×
w1 (δq
×
c2)
×
w2[0025]
在方程式2中,d
b_vi
是占空比,δv1是参考电压差,c1是预定第一比例因子,δq是放电容量,c2是预定第二比例因子,w1是预定第一权重,并且w2是预定第二权重。
[0026]
根据本公开的另一方面的无线电池控制系统包括电池控制器。
[0027]
根据本公开的又一方面的电池组包括无线电池控制系统。
[0028]
根据本公开的又一方面,一种用于串联连接在电池模块的正极端子与负极端子之间的多个电池单体的电池平衡方法包括:测量多个电池单体中的每一个的单体电压;基于
多个电池单体当中、除最底部单体以外的其余电池单体的串联单体电路中包括的至少一个电池单体的单体电压来确定参考单体电压,其中,最底部单体用作用于操作电池模块的电池控制器的电力;当参考单体电压高于最底部单体的第一单体电压时,基于参考电压差确定第一占空比,该参考电压差是通过从参考单体电压减去第一单体电压而获得的电压;以及将具有第一占空比的平衡控制信号输出到并联连接到串联单体电路的平衡电路的放电开关。
[0029]
电池平衡方法还可以包括:当参考单体电压低于阈值单体电压时,基于阈值单体电压与参考单体电压之间的差以及第一占空比来确定第二占空比,第二占空比小于第一占空比;以及将具有第二占空比的平衡控制信号输出到放电开关。
[0030]
有益效果
[0031]
根据本公开的实施例中的至少一个,代替电池模块的模块电压,可以将电池模块中包括的特定电池单体(例如,位于最低位置处的电池单体)的单体电压用作电池控制器的操作电力。因此,能够唤醒电池控制器而无需添加电源电路来将模块电压转换为唤醒电池控制器所需的额定电压。
[0032]
本公开的效果不限于上述效果,并且本领域技术人员将从所附权利要求中清楚地理解本文中未提及的其他效果。
附图说明
[0033]
附图示出了本公开的优选实施例,并且与以下对本公开的详细描述一起用于提供对本公开的技术方面的进一步理解,并且因此,本公开不应被解释为限于附图。
[0034]
图1是示出了根据本公开的实施例的电池组的配置的示意图。
[0035]
图2是示出了图1所示的主设备的配置的示意图。
[0036]
图3是示出了根据本公开的第一实施例的从设备的配置的示意图。
[0037]
图4是示出了根据本公开的第二实施例的从设备的配置的示意图。
[0038]
图5是示出了用于使用根据图3的第一实施例的从设备来平衡电池模块中包括的多个电池单体的方法的流程图。
[0039]
图6是示出了用于使用根据图4的第二实施例的从设备来平衡电池模块中包括的多个电池单体的方法的流程图。
具体实施方式
[0040]
在下文中,将参考附图详细描述本公开的优选实施例。在描述之前,应当理解,说明书和所附权利要求书中使用的术语或词语不应被解释为限于一般含义和字典含义,而应在允许发明人适当定义术语以进行最佳解释的原理的基础上,基于与本公开的技术方面相对应的含义和概念来解释。
[0041]
另外,在描述本公开时,当认为相关的已知元件或功能的某些详细描述使本公开的关键主题不明确时,本文省略详细描述。
[0042]
包括诸如“第一”、“第二”等的序数的术语可以用于在各种元件中将一个元件与另一元件区分开,但是并不旨在通过这些术语来限制这些元件。
[0043]
除非上下文另外明确指出,否则应当理解,术语“包括”或“包含”在本说明书中使
用时指定存在所陈述的元件,但不排除存在或添加一个或多个其他元件。另外,本文使用的术语“控制单元”是指具有至少一个功能或操作的处理单元,并且这可以单独地或组合地通过硬件或软件来实现。
[0044]
此外,在整个说明书中,将进一步理解,当元件被称为“连接”到另一元件时,它可以直接连接到另一元件,或者可以存在中间元件。
[0045]
图1是示出了根据本公开的电池组的配置的示意图。
[0046]
参考图1,电池组10包括多个电池模块201至20
n
(n为2或更大的自然数)、至少一个继电器relay1、relay2和无线电池控制系统30。电池组10可以安装在电气系统1(例如,电动车辆)上以供应电气系统操作所需的电力。
[0047]
电池模块201至20
n
中的每一个可以包括电池单体211至21
m
(参见图3)。
[0048]
继电器relay1可以安装在电池组10的正极端子(p )侧的大电流路径上。继电器relay2可以安装在电池组10的负极端子(p
‑
)侧的大电流路径上。继电器relay1和继电器relay2中的任一个可以在必要时从电池组10移除。
[0049]
无线电池控制系统30包括控制器200和多个控制器1001至100
n
。在下文中,多个电池控制器1001至100
n
中的每一个被称为“从设备”,并且控制器200被称为“主设备”。
[0050]
从设备1001至100
n
以一对一的关系电连接到电池模块201至20
n
。
[0051]
在i=1至n的情况下,从设备100
i
电连接到电池模块20
i
以监测电池模块20
i
的状态。
[0052]
从设备100
i
被配置为测量与电池模块20
i
的状态相关联的模块参数。例如,可以测量电池模块20
i
的模块电压和电池模块20
i
中包括的多个电池单体211至21
m
中的每一个的单体电压作为电池模块20
i
的模块参数。
[0053]
从设备100
i
执行用于控制电池模块20
i
的状态的各种功能(例如,平衡)。每个功能可以由从设备100
i
基于电池模块20
i
的状态直接执行,或者可以响应于来自主设备200的命令执行。
[0054]
主设备200可以耦合到从设备1001至100
n
中的每一个,以使得能够进行无线通信。主设备200接收从从设备1001至100
n
无线传输的感测数据。此外,主设备200基于来自从设备1001至100
n
的感测数据无线传输用于控制从设备1001至100
n
中的至少一个的状态的命令。
[0055]
图2是示出了图1所示的主设备200的配置的示意图。
[0056]
参考图2,主设备200可以包括继电器驱动单元210、通信单元220、电源单元230和控制单元240。
[0057]
继电器驱动单元210被配置为控制继电器relay1、relay2。继电器驱动单元210可以包括继电器驱动电路211、212。继电器驱动电路211通过将开关信号s1输出到继电器relay1来接通或关断继电器relay1,该开关信号s1具有与来自控制单元240的第一命令相对应的第一占空比。继电器驱动电路212通过将开关信号s2输出到继电器relay2来接通或关断继电器relay2,该开关信号s2具有与来自控制单元240的第二命令相对应的第二占空比。
[0058]
通信单元220包括天线221、无线通信电路222和有线通信电路223。无线通信电路222可操作地连接到天线221和有线通信电路223中的每一个。无线通信电路222可以解调通过天线221无线接收的信号。无线通信电路222可以调制将传输到从设备100
i
的信号,并且通过天线222无线传输调制信号。天线221可以将与由通信单元220调制的信号相对应的信
号无线传输到从设备100
i
。
[0059]
有线通信电路223被耦合成使得能够与外部装置2进行双向通信。有线通信电路223将从外部设备2接收的信号有线传输到控制单元240。此外,有线通信电路223将从控制单元240接收的信号有线传输到外部装置2。例如,有线通信电路223可以使用控制器局部网(can)与外部装置2通信。
[0060]
电源单元230使用从外部电源3(例如,电气系统1的铅蓄电池)供应的电力来生成操作电压。由电源单元230生成的操作电压可以被供应到继电器驱动单元210、通信单元220和/或控制单元240。
[0061]
控制单元240包括存储器242和至少一个处理器241,并且可操作地连接到通信单元220。存储器242不限于特定类型,并且可以包括能够记录、擦除、更新和读取数据的任何已知信息存储设备。例如,存储器242可以包括动态随机存取存储器(dram)、同步动态随机存取存储器(sdram)、闪存、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)和寄存器。存储器242可以存储定义可由控制模块120执行的处理的程序代码。存储器242可以存储id表。id表可以记录多个从设备1001至100
n
与多个id之间的相关性。即,id表包括以不同的值分配给多个从设备1001至100
n
的多个id。
[0062]
存储器242可以在物理上与控制单元240分离,并且存储器242和控制单元240可以集成到半导体芯片中。
[0063]
控制单元240被配置为控制主设备200的整体操作。此外,控制器240可以基于通过天线221无线接收的从设备1001至100
n
中的每一个的模块参数来确定电池模块201至20
n
中的每一个的充电状态(soc)和/或健康状态(soh)。此外,控制单元240基于电池模块201至20
n
中的每一个的soc和/或soh来生成用于控制电池模块201至20
n
中的至少一个的充电、放电和/或平衡的消息。由控制单元240生成的消息可以被传输到与电池模块(例如,20
i
)相对应的从设备(例如,100
i
)以使用该消息进行控制。
[0064]
处理器241可以选择性地包括在本技术领域中众所周知的处理器、专用集成电路(asic)、其他芯片组、逻辑电路、寄存器、通信调制解调器和数据处理装置以执行各种控制逻辑。处理器241的各种控制逻辑中的至少一种可以组合在一起,并且组合的控制逻辑可以用计算机可读代码编写并存储在计算机可读记录介质中。
[0065]
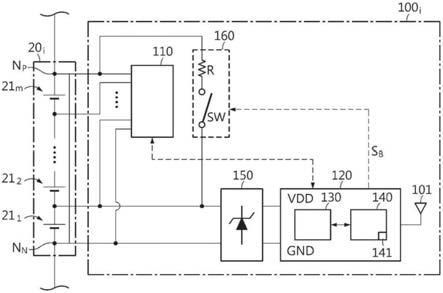
图3是示出了根据本公开的第一实施例的从设备的配置的示意图。
[0066]
参考图3,从设备100
i
电连接到电池模块20
i
。
[0067]
电池模块20
i
包括多个电池单体211至21
m
(m为2或更大的自然数)。电池单体211至21
m
中的每一个可以是例如锂离子单体。电池单体的类型不限于锂离子电池。电池单体不限于特定类型,并且可以包括可以重复地再充电的任何类型的电池单体。电池单体211至21
m
串联电连接在节点n
n
与节点n
p
之间。节点n
n
可以是电池模块20
i
的负极端子。节点n
p
可以是电池模块20
i
的正极端子。电池单体211至21
m
中的每一个可以具有例如在3.0v至4.5v的范围内的单体电压。
[0068]
在1≤x<y≤m的情况下,与电池单体21
y
相比,电池单体21
x
在电气上更靠近节点n
n
并且在电气上更远离节点n
p
。即,电池单体21
x
的负极端子(或正极端子)与节点n
n
之间的电压低于电池单体21
y
的负极端子(或正极端子)与节点n
n
之间的电压。电池单体21
x
的负极端子(或正极端子)与节点n
p
之间的电压高于电池单体21
y
的负极端子(或正极端子)与节点n
p
之间的电压。电池单体211可以被称为电池模块20
i
的“最底部单体(或第一电池单体)”。电池单体21
m
可以被称为电池模块20
i
的“最顶部单体”。
[0069]
从设备100
i
包括天线101、电压测量单元110和控制模块120。从设备100
i
还可以包括保护电路150和平衡电路160中的至少一个。
[0070]
电压测量单元110被配置为测量电池模块20
i
中包括的电池单体211至21
m
中的每一个的单体电压。为此,电压测量单元110可以通过多个感测线电连接到电池单体211至21
m
中的每一个的正极端子和负极端子。
[0071]
电压测量单元110可以测量电池模块20
i
的模块电压。模块电压可以是节点n
n
与节点n
p
之间的电压。
[0072]
控制模块120可以被称为“rf
‑
soc”,并且包括电力输入端子vdd、参考端子gnd、无线通信电路130和处理器140。
[0073]
电力输入端子vdd电连接到位于最低位置处的电池单体211的正极端子。
[0074]
参考端子gnd电连接到节点n
n
。电力输入端子vdd与参考端子gnd之间的电压——即,电池单体211的单体电压——被设置为控制模块120的操作电力。
[0075]
保护电路150可以电连接在电池单体211的正极端子与电力输入端子vdd之间。即,保护电路150可以电连接到连接电池单体211的正极端子和电力输入端子vdd的电线。
[0076]
保护电路150被配置为将施加到电力输入端子vdd的电压的最大值调节为预定设定电压(例如,3.6v)。例如,当电池单体211的单体电压等于或低于设定电压时,可以通过保护电路150将电池单体211的单体电压施加到电力输入端子vdd。相反,当电池单体211的单体电压高于设定电压时,可以通过保护电路150将设定电压而不是电池单体211的单体电压施加到电力输入端子vdd。
[0077]
保护电路150可以包括齐纳二极管,该齐纳二极管包括第一端和第二端。齐纳二极管的第一端(例如,阴极)可以电连接到电池单体211的正极端子,并且齐纳二极管的第二端(例如,阳极)可以电连接到电力输入端子vdd。可以通过齐纳二极管的击穿电压(例如,1.0)将电力输入端子vdd与参考端子gnd之间的电压调节到设定电压以下。
[0078]
可替代地,齐纳二极管的第一端可以电连接到电力输入端子vdd,并且齐纳二极管的第二端可以电连接到参考端子gnd。在这种情况下,齐纳二极管的击穿电压(例如,3.6v)可以等于或低于设定电压。
[0079]
无线通信电路130电连接到天线101。无线通信电路130解调由天线101接收的无线电信号。无线通信电路130可以调制来自处理器140的信号并将调制信号提供给天线101。天线101可以将调制信号无线传输到主设备200。
[0080]
处理器140可操作地耦合到电压测量单元110和无线通信电路130,并且可以包括存储器141。
[0081]
存储器141不限于特定类型,并且可以包括能够记录、擦除、更新和读取数据的任何已知信息存储装置。例如,存储器141可以包括dram、sdram、闪存、rom、eeprom和寄存器。存储器141可以存储定义可由处理器140执行的处理的程序代码。存储器141存储分配给从设备100
i
的id。存储器141中存储的id可以用于从设备100
i
与主设备200的无线通信。存储器141可以在物理上与处理器140分离,并且存储器141和处理器140可以集成到芯片中。
[0082]
处理器140向无线通信电路130提供指示来自电压测量单元110的电压信号的数
据。电压信号指示由电压测量单元110测量的电池单体211至21
m
中的每一个的单体电压。无线通信电路130可以调制指示电压信号的数据,并且通过天线101将调制数据作为感测数据无线传输到主设备200。
[0083]
处理器140可以选择性地包括在本技术领域中众所周知的处理器、asic、其他芯片组、逻辑电路、寄存器、通信调制解调器和数据处理装置以执行各种控制逻辑。控制模块120的各种控制逻辑中的至少一种可以组合在一起,并且组合的控制逻辑可以用计算机可读代码编写并记录在计算机可读记录介质上。记录介质不限于特定类型,并且可以包括可由计算机中包括的处理器访问的任何类型的记录介质。
[0084]
如上所述,在电池模块20
i
中,电池单体211至21
m
当中的仅电池单体211被用作用于操作控制模块120的电力,这使得电池单体211与其余电池单体212至21
m
之间的soc有很大差异。为了电池单体212至21
m
与电池单体211之间的soc平衡,平衡电路160被配置为选择性地形成用于除电池单体211以外的电池单体212至21
m
的放电路径。
[0085]
平衡电路160并联电连接到电池单体212至21
m
。即,在电池单体211至21
m
当中,平衡电路160并联电连接到除电池单体211以外的电池单体212至21
m
的串联单体电路。例如,平衡电路160的第一端可以电连接到电池单体212的负极端子,并且平衡电路160的第一端可以电连接到电池单体21
m
的正极端子。
[0086]
平衡电路160包括放电电阻器r和放电开关sw。放电电阻器r和放电开关sw串联电连接。即,平衡电路160是放电电阻器r和放电开关sw的串联电路。
[0087]
可以通过来自处理器140的平衡控制信号s
b
来控制放电开关sw的接通
‑
关断。例如,放电开关sw可以响应于具有预定高电平电压的平衡控制信号s
b
而接通。相反,放电开关sw可以响应于具有低电平电压的平衡控制信号s
b
而关断。平衡控制信号s
b
可以是脉冲宽度调制(pwm)信号。当放电开关sw被接通时,电池单体212至21
m
的电能被放电电阻器r消耗,并且因此,电池单体212至21
m
中的每一个的soc逐渐减小。
[0088]
处理器140基于电池单体212至21
m
中的至少一个的单体电压来确定参考单体电压。作为示例,参考单体电压可以等于电池单体212至21
m
中的任一个电池单体(例如,212)的单体电压。作为另一示例,参考单体电压可以是电池单体212至21
m
中的至少两个的平均单体电压。
[0089]
随后,处理器140基于参考电压差来控制平衡控制信号s
b
的占空比,该参考电压差是参考单体电压与电池单体211的单体电压之间的差。占空比是平衡控制信号s
b
的脉冲激活时间(例如,高电平电压)与一个周期的时间长度的百分比或比率。例如,当一个周期为0.01秒并且脉冲激活时间为0.005秒时,平衡控制信号s
b
的占空比为0.5(或50%)。当平衡控制信号s
b
的占空比更高时,电池单体212至21
m
被更快地放电。
[0090]
随着参考电压差更大,处理器140可以增加平衡控制信号s
b
的占空比。当参考单体电压高于电池单体211的单体电压时,处理器140可以随着参考电压差更小而减小平衡控制信号s
b
的占空比。例如,参考电压差与平衡控制信号s
b
的占空比之间的关系可以由以下方程式1表示。
[0091]
[方程式1]
[0092]
d
b_v
=δv1×
c1[0093]
d
b_v
表示平衡控制信号s
b
的占空比,δv1表示参考电压差,并且c1表示预定比例因
子。参考电压差可以在控制模块120的操作期间的每个预定监测周期(例如,1.0秒)被周期性地确定。此外,基于参考电压差确定平衡控制信号s
b
的占空比的操作可以在每个预定监测周期重复进行。
[0094]
因此,在电池单体211的soc由于由控制模块120从电池单体211消耗的电力增加而迅速减小的同时,处理器140可以通过增加平衡控制信号s
b
的占空比来平衡(减小)电池单体212至21
m
与电池单体211之间的soc差。相反,在电池单体211的soc由于控制模块120的低电力消耗而缓慢减小的同时,处理器140可以逐渐降低平衡控制信号s
b
的占空比。
[0095]
图4是示出了根据本公开的第二实施例的从设备的配置的示意图。将基于与第一实施例(参见图3)的不同之处来描述根据第二实施例的从设备100,以避免冗余。
[0096]
与第一实施例不同,第二实施例的从设备100还包括电流传感器170,并且基于由电流传感器170测量的电流来控制平衡控制信号s
b
的占空比。
[0097]
参考图4,电流传感器170安装在电池单体211与控制模块120之间的电源路径上。即,电流传感器170可以布置在连接电池单体211的正极端子和电力输入端子vdd的电线上,或布置在连接电池单体211的负极端子和参考端子gnd的电线上。例如,电流传感器170可以布置在电池单体211的正极端子与保护电路150的第一端之间的电流路径上。
[0098]
电流传感器170测量流过电池单体211与控制模块120之间的电源路径的电流,并生成指示测量电流的电流信号。电流传感器170可以包括分流电阻器或霍尔效应传感器。
[0099]
处理器140可操作地耦合到电流传感器170。处理器140可以基于来自电流传感器170的电流信号来控制平衡控制信号s
b
的占空比。
[0100]
详细地,处理器140基于电流信号确定在每个预定监测周期(例如,1.0秒)内作为操作控制模块120的电力而消耗的电池单体211的放电容量。某个监测周期的放电容量可以是在对应的监测周期期间由电流传感器170在每个单位时间(例如,0.0001秒)测量的电流的累积量。处理器140可以基于最新监测周期的放电容量来确定下一监测周期的平衡控制信号s
b
的占空比。例如,随着前一监测周期的放电容量增加,下一监测周期的平衡控制信号s
b
的占空比可以增加。前一监测周期的放电容量与下一监测周期的占空比之间的关系可以由以下方程式2表示。
[0101]
[方程式2]
[0102]
d
b_i
=δq
×
c2[0103]
在方程式2中,d
b_i
表示下一监测周期的平衡控制信号s
b
的占空比,δq表示前一监测周期的放电容量,并且c2表示预定比例因子。
[0104]
例如,假设c2=0.03%/mah。根据方程式2,在第一监测周期内δq=100mah的情况下,在第一监测周期之后的第二监测周期期间,占空比保持在3.0%。此外,在第二监测周期内δq=90mah的情况下,在第二监测周期之后的第三监测周期期间,占空比保持在2.7%。此外,在第三监测周期内δq=120mah的情况下,在第三监测周期之后的第四监测周期期间,占空比保持在3.6%。
[0105]
可替代地,处理器140可以基于参考电压差和前一监测周期的放电容量来确定下一监测周期的占空比。参考电压差、前一放电容量与下一占空比之间的关系可以由以下方程式3表示。方程式3是方程式1和方程式2的组合。
[0106]
[方程式3]
[0107]
d
b_vi
=(δv1×
c1)
×
w1 (δq
×
c2)
×
w2[0108]
w1和w2是具有相同或不同正值的预定权重。例如,w2=1
‑
w1。例如,假设δv1=10mv,c1=0.2[%/mv],c2=0.03[%/mah],w1=0.5,w2=0.5。根据方程式3,在δq=100mah的情况下,在下一监测周期期间占空比可以保持在2.5%,并且在δq=200mah的情况下,在下一监测周期期间占空比可以保持在4.0%。
[0109]
在第一实施例和第二实施例中的至少一个中,当参考单体电压等于或低于电池单体211的单体电压(参考电压差≤0v)时,处理器140可以将平衡控制信号s
b
的占空比设定为0。当占空比为0时,放电开关sw保持关断。
[0110]
图5是示出了用于使用根据图3的第一实施例的从设备来平衡电池模块中包括的多个电池单体的方法的流程图。当与从设备100
i
相对应的控制模块120正在操作时,可以在每个预定监测周期重复图5的方法。
[0111]
参考图3和图5,在步骤s510中,处理器140使用电压测量单元110来测量电池模块20
i
中包括的多个电池单体211至21
m
中的每一个的单体电压。
[0112]
在步骤s520中,处理器140确定参考电压差。参考电压差通过从参考单体电压减去第一电池单体211的第一单体电压来获得。参考单体电压可以是除电池单体211以外的电池单体212至21
m
中的任一个(例如,212)的单体电压,或是电池单体212至21
m
中的两个或更多个的平均单体电压。
[0113]
在步骤s525中,处理器140确定参考电压差是否大于0v。当步骤s525的值为“是”时,执行步骤s530。当步骤s525的值为“否”时,该方法可以结束并且占空比被设定为0。
[0114]
在步骤s530中,处理器140基于参考电压差来确定第一占空比(参见方程式1)。
[0115]
在步骤s540中,处理器140确定参考单体电压是否等于或高于预定阈值单体电压。阈值单体电压可以是与预定soc(例如,20%)相对应的预定电压(例如,3.8v)。步骤s540的值为“是”指示第二至第m电池单体212至21
m
被充分充电。当步骤s540的值为“是”时,执行步骤s550。步骤s540的值为“否”指示第二至第m电池单体212至21
m
中的至少一个可能被过放电。当步骤s540的值为“否”时,执行步骤s560。
[0116]
在步骤s550中,处理器140将具有第一占空比的平衡控制信号s
b
输出到放电开关sw。
[0117]
在步骤s560中,处理器140基于阈值单体电压与参考单体电压之间的差以及第一占空比来确定第二占空比。第二占空比小于第一占空比。处理器140可以使用以下方程式4确定第二占空比。
[0118]
[方程式4]
[0119]
d
b_v_l
=d
b_v
/(δv2×
c3)
[0120]
在方程式4中,d
b_v
表示第一占空比,δv2表示阈值单体电压与参考单体电压之间的差(即,阈值单体电压
‑
参考单体电压),c3表示预定比例因子,并且d
b_v_l
表示第二占空比。c3可以是使得(δv2×
c3)大于1的预设正值。例如,当嵌入电压测量单元110或处理器140中以测量单体电压的模数转换器(adc)的电压分辨率为1/4096v时,c3可以被预设为等于或大于4096[1/v]。从方程式4可以看出,δv2和d
b_v_l
具有反比例关系。
[0121]
在步骤s570中,处理器140将具有第二占空比的平衡控制信号s
b
输出到放电开关sw。在这种情况下,与具有第一占空比的平衡控制信号s
b
相比,能够保护第二至第m电池单
体212至21
m
免于过放电。
[0122]
在图5的方法中,可以省略步骤s540、s560和s570。
[0123]
图6是示出了用于使用根据图4的第二实施例的从设备来平衡电池模块中包括的多个电池单体的方法的流程图。当与从设备100
i
相对应的控制模块120正在操作时,可以在每个预定监测周期重复图6的方法。
[0124]
参考图4和图6,在步骤s610中,处理器140使用电压测量单元110测量电池模块20
i
中包括的多个电池单体211至21
m
中的每一个的单体电压。
[0125]
在步骤s620中,处理器140确定参考电压差。参考电压差通过从参考单体电压减去第一电池单体211的第一单体电压来获得。参考单体电压可以是除电池单体211以外的电池单体212至21
m
中的任一个(例如,212)的单体电压,或是电池单体212至21
m
中的两个或更多个的平均单体电压。
[0126]
在步骤s625中,处理器140确定参考电压差是否大于0v。当步骤s625的值为“是”时,执行步骤s630。当步骤s625的值为“否”时,该方法可以结束并且占空比被设定为0。
[0127]
在步骤s630中,处理器140基于参考电压差和前一放电容量来确定第三占空比(参见方程式3)。前一放电容量可以指示在前一监测周期内流过电流传感器170的电流的累积量。在从控制模块120的唤醒开始起经过一个监测周期之前,步骤s620处的放电容量可以被设定为预定初始值(例如,0mah)。
[0128]
在步骤s640中,处理器140确定参考单体电压是否等于或高于预定阈值单体电压。阈值单体电压可以是与预定soc(例如,20%)相对应的预定电压(例如,3.8v)。步骤s640的值为“是”指示第二至第m电池单体212至21
m
被充分充电。当步骤s640的值为“是”时,执行步骤s650。步骤s640的值为“否”指示第二至第m电池单体212至21
m
中的至少一个可能被过放电。当步骤s640的值为“否”时,执行步骤s660。
[0129]
在步骤s650中,处理器140将具有第三占空比的平衡控制信号s
b
输出到放电开关sw。
[0130]
在步骤s660中,处理器140基于阈值单体电压与参考单体电压之间的差以及第三占空比来确定第四占空比。第四占空比小于第三占空比。处理器140可以使用以下方程式5来确定第四占空比。
[0131]
[方程式5]
[0132]
d
b_vi_l
=d
b_vi
/(δv2×
c4)
[0133]
在方程式5中,d
b_vi
表示第三占空比,δv2表示阈值单体电压与参考单体电压之间的差,c4表示预定比例因子,并且d
b_vi_l
表示第四占空比。c4可以是使(δv2×
c4)大于1的预设正值。例如,当嵌入电压测量单元110或处理器140中以测量单体电压的adc的电压分辨率为1/4096v时,c4可以被预设为等于或大于4096[1/v]。从方程式5可以看出,δv2和d
b_vi_l
具有反比例关系。
[0134]
在步骤s670中,处理器140将具有第四占空比的平衡控制信号s
b
输出到放电开关sw。在这种情况下,与具有第三占空比的平衡控制信号s
b
相比,可以保护第二至第m电池单体212至21
m
免于过放电。
[0135]
在图6的方法中,可以省略步骤s640、s660和s670。
[0136]
以上描述的本公开的实施例不是仅通过设备来实现,并且可以通过实现与本公开
的实施例的配置相对应的功能的程序或在其上记录有程序的记录介质来实现,并且本领域技术人员从前述实施例的公开中可以容易地实现该实施方式。
[0137]
尽管以上已经针对有限数量的实施例和附图描述了本公开,但是本公开不限于此,并且对于本领域技术人员而言显而易见的是,在本公开的技术方面和所附权利要求的等同范围内,可以对其进行各种修改和改变。
[0138]
此外,在不脱离本公开的技术方面的情况下,本领域技术人员可以对本公开进行许多替换、修改和改变,并且本公开不限于前述实施例和附图,并且可以选择性地组合一些或全部实施例以对本公开进行各种修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。