1.本发明涉及辅助触点单元,特别涉及应用于安装在电磁接触器的侧面的辅助触点单元而有效的技术。
背景技术:
2.作为电磁接触器的附件(可选配件)有辅助触点单元。该辅助触点单元是将与电磁接触器的开闭动作(开/关动作)联动的辅助触点的信号向外部的电子控制电路等输出的单元,作为其形式有外装于电磁接触器的主体顶部的头戴式和外装于电磁接触器的主体侧面使用的侧装式。
3.侧装式的辅助触点单元包括:一对固定触头;相对于该一对固定触头可接触和分离地配置的可动触头;保持该可动触头,且与电磁接触器的开闭动作联动地移动的辅助触点支承件;和在由第1壳部件和第2壳部件形成的收纳部内收纳一对固定触头、可动触头和辅助触点支承件的单元壳。
4.另外,关于侧装式的辅助触点单元,在下述的专利文献1和2中有公开。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2011
‑
141963号公报
8.专利文献2:日本特开2012
‑
038644号公报
技术实现要素:
9.发明所要解决的问题
10.不过,辅助触点单元的单元壳以使第1和第2壳部件各自的对接部彼此相对的状态下,利用螺丝等紧固部件的紧固力将第1和第2壳部件各自的对接部压接在一起。
11.但是,第1和第2壳部件是向成形模具注入绝缘性树脂而形成的成形品,各个对接部并不一定平坦,存在使第1和第2壳部件各自的对接部相对时产生间隙的问题。该间隙成为尘埃和灰尘等杂质从外部向单元壳的收纳部内侵入的通过路径,侵入的绝缘性的杂质如果附着在固定触头的固定触点或可动触头的可动触点则成为导致接触不良的原因,从可靠性的观点出发存在改良的余地。
12.本发明的目的在于提供能够提高辅助触点单元的可靠性的技术。
13.用于解决问题的技术手段
14.为了达到上述目,本发明的一个方式的辅助触点单元包括:
15.一对固定触头;相对于所述一对固定触头可接触和分离地配置的可动触头;辅助触点支承件,其保持所述可动触头,且与电磁接触器的开闭动作联动地移动;和单元壳,其在使第1壳部件和第2壳部件各自的对接部彼此相对而形成的收纳部内,收纳所述一对固定触头、所述可动触头和所述辅助触点支承件,所述第1壳部件和第2壳部件各自的对接部被气密地接合。
16.发明的效果
17.根据本发明的一个方式,能够提高辅助触点单元的可靠性。
附图说明
18.图1是表示将本发明的第1实施方式的辅助触点单元安装在电磁接触器的侧面的状态的立体图。
19.图2是表示电磁接触器的断开状态的内部结构的截面图。
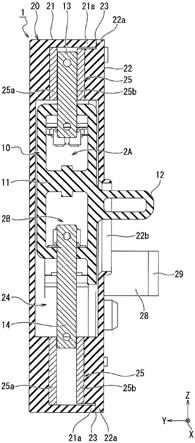
20.图3是表示电磁接触器的断开状态的内部结构和辅助触点单元的内部结构的截面图。
21.图4是表示电磁接触器的断开状态下的辅助触点单元的内部结构的截面图。
22.图5是表示电磁接触器的接通状态的内部结构和辅助触点单元的内部结构的截面图。
23.图6是表示电磁接触器的接通状态的内部结构和辅助触点单元的内部结构的截面图。
24.图7是表示电磁接触器的接通状态下的辅助触点单元的内部结构的截面图。
25.图8是辅助触点单元的立体图。
26.图9是辅助触点单元的分解立体图。
27.图10是辅助触点单元的截面图。
28.图11是将图10的一部分放大后的放大截面图。
29.图12是组装入辅助触点单元中的辅助触点支承件的立体图。
30.图13是辅助触点单元的分解立体图。
31.图14是将图12的一部分放大后的分解立体图。
32.图15是表示本发明的第1实施方式的变形例的主要部分截面图。
33.图16是本发明的第2实施方式的辅助触点单元的分解立体图。
具体实施方式
34.以下,参照附图详细地说明本发明的实施方式。
35.另外,对用于说明发明的实施例的所有图中,具有相同功能的部分标注相同的附图标记,省略其重复的说明。
36.此外,各图只是示意的图,存在与现实不同的情况。此外,以下的实施方式例示了用于将本发明的技术思想具体化的装置和方法,而不将结构限定于下述的内容。即,本发明的技术思想能够在权利要求书所记载的技术范围内,进行各种变更。
37.此外,在以下的实施方式中,在空间内相互正交的三个方向上,令在同一平面内相互正交的第一方向和第二方向分别为x方向、y方向,令与第一方向和第二方向分别正交的第三方向为z方向。在以下的实施方式中,将辅助触点单元的辅助触点支承件所移动的方向定义为z方向来进行说明。
38.(第1实施方式)
39.在该第1实施方式中,说明在侧装式的辅助触点单元中应用本发明的一个例子。
40.(辅助触点单元的安装位置)
41.首先,参照图1和图8对本发明的第1实施方式的辅助触点单元1的安装位置进行说明。
42.如图1所示,本发明的第1实施方式的辅助触点单元1可拆装地安装在电磁接触器50的主体壳51的侧面。辅助触点单元1的安装是通过使设置在辅助触点单元1的单元壳20的钩子18上的卡合部19(参照图8)卡合到设置在电磁接触器50的主体壳51上的被卡合部(未图示)而进行的。
43.(电磁接触器的结构)
44.接着,参照图1至图3说明电磁接触器50的结构。
45.如图1至图3所示,电磁接触器50包括:主体壳51、进行电路的开闭的触点单元60和驱动该触点单元60的电磁铁单元70。触点单元60和电磁铁单元70以在z方向上并列配置地收纳于主体壳51内。该电磁接触器50开闭三相交流的电路。
46.如图2所示,触点单元60具有:一对固定触头61和62、相对于该一对固定触头61和62可接触和分离地配置的桥连形的可动触头63、以及保持该可动触头63的可动触点支承件64。
47.一对固定触头61和62在x方向延伸,在一端侧设置有固定触点,在另一端侧设置有外部端子部。而且,一对固定触头61和62以各自的一端侧彼此相对且在x方向上隔开间隔的状态,固定于主体壳51。
48.可动触头63在x方向延伸,在一端侧和另一端侧分别设置有可动触点。可动触头63的一端侧的可动触点与一个固定触头61的固定触点彼此相对地配置。可动触头63的另一端侧的可动触点与另一个固定触头62的固定触点彼此相对地配置。可动触头63保持在可动触点支承件64。一对固定触头61和62以及可动触头63构成触点部,该触点部对应于三相交流的电路,在y方向上排列3个地配置。
49.如图2和图3所示,电磁铁单元70具有固定铁芯71和可动铁芯72、电磁线圈73、以及复位弹簧76。固定铁芯71和可动铁芯72以各自的磁接触面彼此相对的方式配置。
50.电磁线圈73利用电磁力产生使固定铁芯71与可动铁芯72吸附的磁场。电磁线圈73具有绕组74和绕线架75。绕组74从固定铁芯71和可动铁芯72各自的中央脚部与外侧脚部之间通过而在中央脚部的周围卷绕。绕线架75是供该绕组74缠绕的部件。绕线架75具有在其内径侧插入固定铁芯71和可动铁芯72各自的中央脚部,在其外径侧缠绕绕组74的圆筒部。此外,在绕线架75设置有从该圆筒部的两个端部向外径侧呈凸缘状鼓出的凸缘部。
51.复位弹簧76是对可动铁芯72施加使其从固定铁芯71离开的方向的力的施力单元。复位弹簧76例如是在电磁线圈73的绕线架75的上表面与可动铁芯72之间充盈设置的螺旋弹簧。
52.一对固定触头61和62与可动触头63是通过相互接触、隔开间隔来切换电路的连接、切断的电触点。
53.如图2所示,可动触头63固定于可动触点支承件64的z方向的一端侧。而且,可动触点支承件64的z方向的另一端侧固定于可动铁芯72的与脚部侧相反侧的背面部。可动触头63与可动铁芯72的z方向的移动联动地在z方向移动。即,一对固定触头61和62与可动触头63,在一对固定铁芯71与可动铁芯72相互隔开间隔的断开状态下隔开间隔,在固定铁芯71与可动铁芯72接触的接通状态下接触。
54.在可动触头63的与可动铁芯72侧相反侧设置有接触弹簧77。
55.(辅助触点单元的结构)
56.接着,参照图4、图8至图13说明本发明的第1实施方式所涉及的辅助触点单元1的结构。
57.如图4所示,辅助触点单元1包括第1触点部2a和第2触点部2b。第1触点部2a具有一对固定触头3a和4a,以及相对于该一对固定触头3a和4a可接触和分离地配置的桥连形的可动触头5a。同样,第2触点部2b也具有一对固定触头3b和4b,以及相对于该一对固定触头3b和4b可接触和分离地配置的可动触头5b。
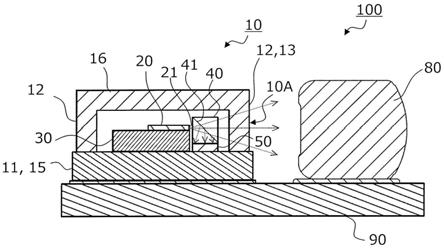
58.此外,如图4、图9和图10所示,辅助触点单元1包括保持第1触点部2a的可动触头5a和第2触点部2b的可动触头5b,且与电磁接触器50的开闭动作联动地在z方向上移动的辅助触点支承件(辅助触点保持部件)10。
59.此外,如图4、图8图10所示,辅助触点单元1包括单元壳20,其具有第1壳部件21和第2壳部件22,在使该第1壳部件21和第2壳部件22各自的对接部21a、22b彼此相对而形成的收纳部24内,收纳1触点部2a、第2触点部2b和辅助触点支承件10等。
60.如图4所示,第1触点部2a和第2触点部2b在辅助触点支承件10的移动方向(z方向)上分两级地配置。第1触点部2a配置在第2触点部2b的上方。
61.在第1触点部2a,如图4所示,一对固定触头3a和4a在x方向延伸,在一端侧设置有固定触点,在另一端侧设置有外部端子部。而且,一对固定触头3a和4a以各自的一端侧相对且在x方向上隔开间隔的状态,被固定于单元壳20。可动触头5a在x方向延伸,在一端侧和另一端侧分别设置有可动触点。可动触头5a的一端侧的可动触点与一个固定触头3a的固定触点彼此相对地配置。可动触头5a的另一端侧的可动触点与另一个固定触头4a的固定触点彼此相对地配置。
62.在第2触点部2b,如图4所示,一对固定触头3b和4b在x方向延伸,在一端侧设置有固定触点,在另一端侧设置有外部端子部。而且,一对固定触头3b和4b以各自的一端侧相对且在x方向上隔开间隔的状态,被固定于单元壳20。可动触头5b在x方向延伸,在一端侧和另一端侧分别设置有可动触点。可动触头5b的一端侧的可动触点与一个固定触头3b的固定触点彼此相对地配置。可动触头5b的另一端侧的可动触点与另一个固定触头4b的固定触点彼此相对地配置。
63.一对固定触头3a和4a、可动触头5a、一对固定触头3b和4b、以及可动触头5b,例如由平板状的金属制导电板形成。
64.如图12所示,辅助触点支承件10具有:保持第1触点部2a的可动触头5a和第2触点部2b的可动触头5b的主体部11;和一体地设置于主体部11的侧面,且从主体部11的侧面向y方向突出的连结突起12。此外,辅助触点支承件10具有与主体部11的长度方向(z方向)的两侧分别连结地设置,且在主体部11的长度方向延伸的棒状的第1滑动导片13和第2滑动导片14。主体部11和连结突起12例如由环氧类的热固化性绝缘树脂形成,第1滑动导片13和第2滑动导片14由导电性材料形成。作为导电性材料,并不限定于此,例如能够列举铝、铜等金属材。
65.如图8至图10所示,连结突起12插通单元壳20的第2壳部件22上所设置的长孔22b而向外部突出,且以插通该长孔22b的状态在辅助触点支承件10的移动方向移动。辅助触点
支承件10的连结突起12如图3所示,当在电磁接触器50的主体壳51的侧面安装了辅助触点单元1时,插入到电磁接触器50的可动触点支承件64上所设置的凹部64a中,与可动触点支承件64连结。即,辅助触点单元1的辅助触点支承件10与电磁接触器50的开闭动作联动地在z方向移动。
66.如图10和图11所示,第1壳部件21的对接部21a和第2壳部件22的对接部22a在与辅助触点支承件10的移动方向(z方向)正交的方向(y方向)上彼此相对。而且,第1壳部件21和第2壳部件22各自的对接部21a、22a被气密地接合。在该第1实施方式中,第1壳部件21和第2壳部件22各自的对接部21a、22a通过熔接而被气密地接合。因此,如图11所示,在第1壳部件21和第2壳部件22各自的对接部21a、22a形成有熔接部23。作为通过熔接进行的气密接合,有通过激光照射来将各自的对接部21a、22a熔接的方法、通过热压接来将对接部熔接的方法等。在该第1实施方式中,利用热压接法将第1壳部件21和第2壳部件22各自的对接部21a、22a气密地接合。
67.单元壳20通过组合各自的第1壳部件21和第2壳部件22而形成。具体而言,在使第1壳部件21和第2壳部件22各自的对接部21a、22a相对的状态下,例如利用紧固部件将第1壳部件21和第2壳部件22紧固地固定。而且,在紧固地固定了的状态下,将第1壳部件21和第2壳部件22各自的对接部21a、22a例如通过熔接来气密地接合。第1和第2壳部件21、22是分别在成形模具中例如注入环氧类的热固化性绝缘树脂而形成的成形品。
68.第1壳部件21具有平板部和设置在该平板部的一面侧的肋部。另一方面,第2壳部件22由平板形成。第1壳部件21的对接部21a由肋部构成,第2壳部件21的对接部22a由与第1壳部件21的肋部相对的平板的一部分构成。
69.如图10、图13和图14所示,单元壳20还具有2个供辅助触点支承件10的第1滑动导片13和第2滑动导片14单独地滑动的筒状的导轨25。第1滑动导片13在一个导轨25的内周面在一个导轨25的长度方向(z方向)上滑动,第2滑动导片14在另一个导轨25的内周面在另一个导轨25的长度方向(z方向)上滑动。
70.2个导轨25分别由在与长度方向正交的宽度方向上分割成2部分的2个分割片25a、25b构成,一个分割片25a固定在第1壳部件21,另一个分割片25b固定在第2壳部件22。而且,该2个分割片25a、25b通过将第1壳部件21和第2壳部件22各自的对接部21a、22a组合而构筑导轨25。
71.辅助触点支承件10的第1和第2滑动导片13、14分别由筒状的导轨25可滑动地支承,主体部11以从第1壳部件21和第2壳部件22隔开间隔的状态收纳于单元壳20的收纳部24。
72.(电磁接触器和辅助触点单元的动作)
73.接着,参照图2至图7,与电磁接触器50的动作一起说明安装在电磁接触器50的主体壳侧面的辅助触点单元1的动作。
74.首先,令电磁接触器50的电磁线圈73为非通电状态(非励磁状态),电磁接触器50为非动作状态(参照图2至图4)。在该非通电状态,因为固定铁芯71的脚部不产生吸引力,所以可动触点支承件64被复位弹簧76向离开固定铁芯71的后方(上方向)施力。因此,在各触点部,可动触头63成为从一对固定触头61和62向后方隔开间隔的位置,电磁接触器50成为断开状态。
75.在该电磁接触器50的断开状态下,如图4所示,辅助触点单元1的第1触点部2a为可动触头5a与一对固定触头3a和4a分别接触的闭路状态(b触点状态),辅助触点单元1的第2触点部2b为,可动触头5b从一对固定触头3b和4b分别隔开间隔的开路状态(a触点状态)。
76.当从电磁接触器50的断开状态,对电磁接触器50的电磁线圈73通电而成为动作状态时,在固定铁芯71的脚部和磁接触面产生电磁吸引力。因该电磁吸引力,可动铁芯72抵抗复位弹簧76被固定铁芯71吸引,可动触点支承件64向固定铁芯71前进移动,被保持于可动触点支承件64的可动触头63向一对固定触头61和62前进移动。
77.接着,如图5所示,可动触头63与一对固定触头61和62接触而成为接通状态时,可动触头63的前进移动停止,但是维持可动触点支承件64的前进移动。因此,接触弹簧77被压缩。
78.之后,当可动铁芯72被吸附在固定铁芯71的磁接触面时,可动触点支承件64的前进移动停止。在该状态下,可动触头63成为因接触弹簧77而与一对固定触头61和62以规定的接触压接触的完全接通状态。而且,因可动铁芯72与固定铁芯71的吸引力而保持完全接通状态。
79.在从该电磁接触器50的断开状态向完全接通状态的过渡中,在辅助触点单元1,辅助触点支承件10与电磁接触器50的可动触点支承件64的前进移动联动地向下方前进移动,被保持于辅助触点支承件10的可动触头5a向从一对固定触头3a和4a离开的方向移动,并且被保持于辅助触点支承件10的可动触头5b向靠近一对固定触头3b和4b的方向移动。此时的辅助触点支承件10的移动通过第1滑动导片13和第2滑动导片14分别在导轨25滑动而进行。
80.接着,当电磁接触器50的可动触点支承件64的前进移动停止时,辅助触点单元1的第1触点部2a如图7所示,成为可动触头5a从一对固定触头3a和4a分别隔开间隔的开路状态(a触点状态),辅助触点单元1的第2触点部2b成为可动触头5b与一对固定触头3b和4b分别接触的闭路状态(b触点状态)。该第1触点部2a的开路状态和第2触点部2b的闭路状态通过电磁接触器50的完全接通状态的保持而被保持。
81.当从完全接通状态切断电磁接触器50的电磁线圈73的通电时,吸引力从电磁接触器50的固定铁芯71消失,由此可动触点支承件64通过复位弹簧76的弹力而向从固定铁芯71离开的方向后退移动。因此,可动触头63从一对固定触头61和62向后方离开,恢复成断开状态。此时,在辅助触点单元1,辅助触点支承件10与电磁接触器50的可动触点支承件64的后退移动联动地向上方后退移动,被保持于辅助触点支承件10的可动触头5a向靠近一对固定触头3a和4a的方向移动,并且被保持于辅助触点支承件10的可动触头5b向从一对固定触头3b和4b离开的方向移动。此时的辅助触点支承件10的移动通过第1滑动导片13和第2滑动导片14分别在导轨25滑动而进行。
82.接着,当电磁接触器50的可动触点支承件64的后退移动停止时,辅助触点单元1的第1触点部2a恢复成可动触头5a与一对固定触头3a和4a分别接触的闭路状态(b触点状态),辅助触点单元1的第2触点部2b恢复成可动触头5b从一对固定触头3b和4b分别离开的开路状态(a触点状态)(参照图4)。
83.(第1实施方式的效果)
84.接着,对该第1实施方式的主要的效果进行说明。
85.现有的辅助触点单元的单元壳是在第1和第2壳部件各自的对接部彼此相对的状
态下,通过由螺丝等紧固部件产生的紧固力,将第1和第2壳部件各自压接在一起。而且,第1和第2壳部件是向成形模具注入绝缘性树脂而单独地形成的成形品,第1和第2壳部件各自的对接部并不一定平坦。因此,在将第1和第2壳部件各自的对接部相对时有时会产生间隙。该间隙成为尘埃和灰尘等杂质从外部侵入单元壳的收纳部的通过路径,侵入的绝缘性的杂质如果附着在固定触头或可动触头的触点部则成为导致接触不良的重要原因。
86.对此,该第1实施方式的辅助触点单元1是通过熔接来将第1壳部件21和第2壳部件22各自的对接部21a、21b气密地接合。因此,即使在第1壳部件21和第2壳部件22各自的对接部21a、22a相对时产生间隙,该间隙也通过气密地接合而被堵住,能够防止尘埃和灰尘等杂质通过第1壳部件21和第2壳部件22各自的对接部21a、22a从外部向单元壳20的收纳部24侵入。其结果是,能够抑制由于从外部侵入单元壳20的收纳部24内的绝缘性杂质附着在固定触头3a、4a、3b、4b的固定触点以及可动触头5a、5b的可动触点而在第1触点部2a的一对固定触头3a和4a与可动触头5a之间产生的接触不良,以及在第2触点部2b的一对固定触头3b和4b与可动触头5b之间产生的接触不良。因此,根据该第1实施方式,能够提供与现有的辅助触点单元相比可靠性高的辅助触点单元1。
87.此外,在现有的辅助触点单元,采用辅助触点支承件的主体部在与第1和第2壳部件分别相对地成形的引导部滑动的结构。而且,第1和第2壳部件各自的引导部以及辅助触点支承件的主体部由绝缘性树脂形成。因此,当将辅助触点支承件的主体部多次移动时,壳部件的引导部及辅助触点支承件的主体部发生磨损,其磨损片作为绝缘性的杂质附着在固定触头的固定触点及可动触头的可动触点,成为导致固定触头与可动触头的接触不良的重要原因。
88.对此,在该第1实施方式的辅助触点单元1中,辅助触点支承件10的第1和第2滑动导片13、14和2个导轨25由导电性材料形成。因此,由于将辅助触点支承件10的第1和第2滑动导片13、14多次移动而引起的辅助触点支承件10的第1和第2滑动导片13、14的磨损和2个导轨25的磨损所产生的磨损片是导电性的杂质,即使该导电性的杂质附着于固定触头3a、4a、3b、4b的固定触点和可动触头5a、5b的可动触点,也能够减少导致第1触点部2a的一对固定触头3a和4a与可动触头5a的接触不良、以及第2触点部2b的一对固定触头3b和4b与可动触头5b的接触不良的重要原因。因此,根据该第1实施方式的辅助触点单元1,能够抑制由于单元壳20的收纳部24内产生的杂质而引起的第1触点部2a的一对固定触头3a和4a与可动触头5a的接触不良、以及第2触点部2b的一对固定触头3b和4b与可动触头5b的接触不良。
89.(变形例)
90.在上述的第1实施方式中,对通过熔接来将第1壳部件21和第2壳部件22各自的对接部21a、22a气密地接合的结构进行了说明。但是,本发明并不限定于该通过熔接进行的气密接合。例如,也可以如图15所示,通过粘接材来将第1壳部件21和第2壳部件各自的对接部26气密地接合。
91.(第2实施方式)
92.本发明的第2实施方式的辅助触点单元1a基本上为与上述的第1实施方式的辅助触点单元1相同的结构,仅以下的结构不同。
93.即,如图16所示,第2实施方式的辅助触点单元1a在单元壳20的收纳部24内设有以覆盖辅助触点支承件10的方式固定在第1壳部件21的覆盖部件27。覆盖部件27具有供辅助
触点支承件10的连结突起12贯通的长孔27a。而且,第2壳部件22中替代第1实施方式的长孔22b而具有供覆盖部件27的一部分插入的十字形的贯通孔22c。而且,辅助触点支承件10的连结突起12插通覆盖部件27的长孔27a和第2壳部件22的贯通孔22c向单元壳20的外部突出。
94.如上所述,该第2实施方式的辅助触点单元1a包括覆盖部件27。因此,根据该第2实施方式的辅助触点单元1a,能够利用覆盖部件来抑制从外部侵入单元壳20的收纳部24内的杂质附着在固定触头(3a、4a、3b、4b)的固定触点和可动触头5a、5b的可动触点。根据该第2实施方式,能够提供与现有的辅助触点单元相比可靠性更高的辅助触点单元1。
95.另外,该第2实施方式即使不像上述的第1实施方式那样进行第1壳部件21与第2壳部件22的气密接合,也能够得到可靠性高的辅助触点单元1,但是通过如上述的第1实施方式那样进行第1壳部件21与第2壳部件22的气密接合,能够进一步提高可靠性。
96.此外,覆盖部件27和第1壳部件21各自的对接部可以不气密地接合,也可以如上述的第1实施方式那样通过熔接来气密地接合,此外,还可以如上述的变形例那样利用粘接材来气密地接合。
97.另外,在上述的第2实施方式中,对将覆盖部件27固定在第1壳部件21的结构进行了说明。但是,本发明并不限定于第1壳部件21的固定。例如,覆盖部件27既可以固定在第2壳部件22,此外也可以固定在第1壳部件21和第2壳部件2双方。总之,覆盖部件27以覆盖辅助触点支承件10的方式固定在第1和第2壳部件21、22的至少任一者即可。
98.此外,在上述的第1和第2实施方式中,对用导电性材料来形成第1和第2滑动导片13、14和2个导轨25的情况进行了说明。但是,本发明并不限定于将该滑动导片(13、14)和导轨25的两者均用导电性材料来形成的情况。例如,也可以将滑动导片(13、14)和导轨25的至少任一者用导电性材料形成。此外,也可以将第1和第2滑动导片13、14的任一者用导电性材料形成,还可以将2个导轨25的任一者用导电性材料形成。总之,单元壳20的收纳部24内的绝缘性杂质的产生比现有技术少即可。
99.此外,在上述的第1和第2实施方式中,对在第1壳部件21设置有肋部的结构进行了说明,不过本发明并不限定于在第1壳部件21设置有肋部的结构。本发明还能够应用于在第2壳部件22设置有肋部的结构、以及在第1和第2壳部件双方设置有肋部的结构。
100.近年来,严苛的环境下的电磁接触器的使用正在增加,作为电磁接触器的附件的辅助触点单元也被要求能够承受严苛的环境下的使用的耐环境性能(防尘)。因此,本发明的辅助触点单元对严苛的环境下的使用是有用的。
101.以上,基于上述实施方式和变形例对本发明进行了具体说明,不过本发明当然并不限定于上述实施方式和变形例,能够在不脱离其主旨的范围内进行各种变更。
102.附图标记的说明
103.1、1a
…
辅助触点单元
104.2a
…
第1触点部
105.2b
…
第2触点部
106.3a、3b、4a、4b
…
固定触头
107.5a、5b
…
可动触头
108.10
…
辅助触点支承件
109.11
…
主体部
110.12
…
连结突起
111.13
…
第1滑动导片
112.14
…
第2滑动导片
113.20
…
单元壳
114.21
…
第1壳部件
115.21a
…
对接部
116.22
…
第2壳部件
117.22a
…
对接部
118.22b
…
长孔
119.23
…
熔接部
120.24
…
收纳部
121.25
…
导轨
122.26
…
粘接材
123.27
…
覆盖部件
124.50
…
电磁接触器
125.51
…
主体壳
126.60
…
触点单元
127.61、62
…
固定触头
128.63
…
可动触头
129.64
…
可动触点支承件
130.70
…
电磁铁单元
131.71
…
固定铁芯
132.72
…
可动铁芯
133.73
…
电磁线圈
134.74
…
绕组
135.75
…
绕线架
136.76
…
复位弹簧
137.77
…
接触弹簧
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。