饱和准备地记录mr图像数据
技术领域
1.本发明涉及一种用于饱和准备地记录mr图像数据的方法、一种磁共振设备以及一种计算机程序产品。
背景技术:
2.在磁共振检查(mr检查)中,检查对象、特别是人类和/或动物患者和/或检查体模通常暴露在相对较强的、例如1.5或3或7特斯拉的主磁场中。这能够通过将检查对象定位在磁共振设备的记录区域内来实现。通过将检查对象定位在相对较强的主磁场内,通常会导致核自旋、特别是水质子自旋与检查对象内的主磁场方向平行或反平行地对齐。在此,导致核自旋围绕主磁场方向以拉莫尔频率进动。拉莫尔频率在此取决于核的类型以及取决于主磁场的磁通密度。
3.由于核自旋与主磁场的平行对齐代表了一种热和能量的平衡状态,因此经常出现净磁化与主磁场的平行对齐。在此,净磁化(以下也被称为磁化)作为核自旋的各个磁偶极矩的有效宏观磁化给出。
4.借助梯度线圈单元,可以输出附加的并且空间上变化的磁场、特别是磁场梯度,以下也称为梯度。通过沿磁场梯度的空间维度的因此与位置相关的拉莫尔频率,可以由此实现检查区域内的位置编码。在此,磁场梯度的空间维度可以包括读取方向和/或相位编码方向和/或层编码方向,这些方向尤其是彼此正交地延伸。以下将沿读取方向的磁场梯度称为读取梯度。此外,将沿相位编码方向的磁场梯度称为相位编码梯度。此外,将沿层编码方向的磁场梯度称为层编码梯度。先前所描述的磁场梯度在读取梯度、相位编码梯度和层编码梯度方面(特别是以下所使用的名称)的区分说明了相应的磁场梯度的空间维度。
5.借助高频天线单元,可以输出高频脉冲(hf脉冲)、例如激励脉冲或饱和脉冲。只要hf脉冲与核自旋的拉莫尔频率发生共振,就能实现核自旋脱离平衡状态的激励、特别是偏转。在此产生的围绕主磁场方向的净磁化的进动的横向分量可以导致hf天线单元中的感应。在此,净磁化的横向分量随着横向弛豫时间常数而特别地指数式下降。在此,mr信号、特别是自由感应衰减(free
‑
induction
‑
decay,fid)可以借助hf天线单元来检测。此外,净磁化的纵向弛豫又回到热平衡状态。
6.借助检测到的mr信号(其特别是通过输出磁场梯度来进行位置编码),可以重建检查对象的磁共振图像(mr图像)。
7.如果在输出单个激励脉冲之后读出多个mr信号,则可以检测到核自旋弛豫的时间走向。在此,激励脉冲的输出与mr信号的读取之间的持续时间通常被称为回波时间(英语:echo time,te)。
8.通常,多个梯度、特别是沿不同空间维度的梯度的输出以及hf脉冲的输出被组合在一个序列中,也被称为脉冲序列或mr序列。在此,该序列通常还包括读取窗(模数转换,adc)的时间序列,在该读取窗内能够实现对mr信号的读取。
9.在记录检查对象的检查体积的mr图像数据时,通常执行具有多个测量层的多层记
录。在此,由于特别是在记录的不同层之间的流动运动、例如脉动的血流,可能导致磁化从周围层传递到、特别是流入到测量层。这尤其能够使得对检查体积中借助造影剂来对比的区域(例如病变)的识别更加困难。为了抑制流入的磁化的mr信号,通常使测量层周围、特别是在检查体积之外的预定义的空间区域饱和。对于在多层记录中的应用,由于通常在每个单个测量层上调整和/或追踪饱和(英语:travelling sats),增高的测量时间成本和增加的能量输入、特别是增加的比吸收率(sar)是不利的。
技术实现要素:
10.因此,本发明要解决的技术问题是,能够实现时间高效地记录低伪影的mr图像。
11.根据本发明,上述技术问题通过本发明的相应的内容来解决。具有适宜的扩展方案的有利的实施方式是本发明的内容。
12.在第一方面,本发明涉及一种用于饱和准备地记录mr图像数据的方法。在此,在第一步骤中,在检查对象的检查体积中确定至少两个测量层。在此,检查体积具有相邻层,相邻层分别与至少两个测量层中的至少一个邻接。此外,在第二步骤b.1)中,输出饱和模块,该饱和模块包括至少一个饱和脉冲,以用于使相邻层的磁化饱和。此后,在步骤c)中,输出激励脉冲,以用于激励至少两个测量层中的至少一个的磁化。此外,在步骤d)中,读取检查体积的mr信号。此外,频繁实施步骤b.1)至d),直至至少两个测量层中的所有测量层的磁化都已被激励。在另外的步骤e)中,基于mr信号重建来自至少两个测量层的mr图像数据。此外,在步骤f)中提供mr图像数据。
13.有利地,对至少两个测量层的确定可以包括对检查体积中的至少两个测量层的空间定位,特别是基于检查体积的概览记录。在此,至少两个测量层的空间定位可以具有至少两个测量层相对于检查体积的空间位置和/或取向。此外,对至少两个测量层的确定可以包括对至少两个测量层的至少一个几何参数的预先给定,例如空间延伸和/或层厚度和/或空间分辨率。此外,确定可以包括预先给定至少两个测量层相对于彼此和相对于检查体积的空间定位。在此,还可以预先给定至少两个测量层的至少一个几何参数,例如测量层之间的空间距离(英语:inter
‑
slice
‑
distance)和/或层厚度。
14.此外,对检查对象的检查体积中的至少两个测量层的确定可以手动地和/或半自动地和/或自动地进行。例如,至少两个测量层可以借助输入单元基于用户输入来确定。此外,用户输入可以具有关于至少两个测量层的至少一个几何参数的信息和/或关于至少两个测量层在检查体积中的空间定位的信息。在此,可以至少部分地基于用户输入例如半自动地进行对至少两个测量层的确定。
15.至少两个测量层在此可以在检查体积内标记空间区域,该空间区域被映射到待记录的mr图像数据中。有利地,至少两个测量层可以被构建为基本平坦,并且具有层平面,沿着该层平面,至少两个测量层是空间分辨的。至少两个测量层可以在检查体积中彼此平行地和/或沿一个空间维度布置,该空间维度相对于相应的层平面具有共同的、特别是垂直的角度。在此,至少两个测量层的层平面可以特别地分别是相关测量层的中心平面。
16.此外,检查体积可以表示检查对象的空间部段、特别是三维的部段。在此有利地,检查体积可以沿至少一个空间维度比至少两个测量层大。检查对象例如可以是人类患者和/或动物患者和/或检查体模。
17.此外,检查体积可以有利地具有至少三个相邻层,至少三个相邻层特别是直接与至少两个测量层邻接。在此,相邻层可以有利地布置在检查体积的空间区域中,在这些空间区域中未布置测量层。因此,相邻层和至少两个测量层可以在空间上填满、特别是完全填满检查体积。特别地,相邻层可以类似于至少两个测量层分别具有层平面。在此,相邻层的层平面尤其可以分别是相关相邻层的中心平面。
18.检查体积可以有利地具有比步骤a)中已经确定的测量层多一个的相邻层。在此,相邻层可以沿着空间维度包围所确定的测量层,该空间维度相对于至少两个测量层的相应的层平面具有共同的、特别是垂直的角度。此外,相邻层的层厚度可以对应于至少两个测量层中的各两个之间的层距离。在此,相邻层中分别邻接恰好一个测量层的两个相邻层可以被构建为检查体积的边缘层。此外,分别邻接两个不同测量层的其余相邻层可以被构建为检查体积的中间层。因此,至少两个测量层中的每一个可以分别邻接恰好两个不同的相邻层。类似于至少两个测量层,相邻层可以在检查体积中彼此平行地和/或沿空间维度布置,该空间维度相对于相应的层平面具有共同的、特别是垂直的角度。相邻层可以有利地具有沿相邻层的相应的层平面的、相对于至少两个测量层相同或不同的空间延伸和/或分辨率。
19.在步骤b)中,可以进行饱和模块的输出,该饱和模块包括至少一个饱和脉冲,以用于使相邻层的磁化饱和,其中,该至少一个饱和脉冲由hf脉冲形成。在此,饱和模块可以描述mr序列部段,该mr序列部段被构建为用于使相邻层的磁化饱和。饱和模块、特别是至少一个饱和脉冲可以引起相邻层的磁化的偏转,特别是脱离平衡状态和/或进入横向平面。此外,饱和模块、特别是至少一个饱和脉冲可以被构建为用于在横向平面内产生磁化的特别是最大的相位分散。由此可以实现,在输出饱和模块之后,使相邻层的磁化饱和。在此,至少一个饱和脉冲可以被构建为使对应于相邻层的预定谐振频率范围饱和、特别是选择性地和/或非选择性地饱和。对于相邻层的饱和、特别是同时的饱和,至少一个饱和脉冲可以被构建为多频带脉冲,其中各个饱和带、特别是用于进行饱和的频带与相邻层中的一个相对应。
20.在步骤c)中,可以进行激励脉冲的输出,以用于激励至少两个测量层中的至少一个、特别是所有测量层的磁化,其中激励脉冲由hf脉冲形成。激励脉冲可以引起至少两个测量层中的至少一个的磁化偏转、特别是选择性的偏转,尤其是以预定翻转角度脱离平衡状态。激励脉冲可以有利地被构建为多频带脉冲,以特别是同时地激励至少两个测量层中的至少一个。在重复实施步骤b.1)至d)时,至少两个测量层中的至少一个测量层、特别是不是所有的测量层的磁化可以分别通过输出激励脉冲来激励。有利地,在步骤b.1)至d)的每次实施中,激励脉冲可以被调整为,使得其磁化被激励的至少一个测量层与先前的测量层不同。此外,在实施步骤b.1)至d)时,至少两个测量层中的至少一个的数量可以与之前分别实施步骤b.1)至d)时相同或不同。如果需要的话,步骤c)可以包括输出至少一个另外的激励脉冲,以用于激励相应实施步骤b.1)至d)的至少两个测量层中的至少一个的磁化。因此,激励脉冲可以被构建为用于激励至少两个测量层中的至少一个的单个或所有的磁化。
21.有利地,可以实施、特别是重复地实施步骤b.1)至d),直至步骤b.1)中至少两个测量层中的所有测量层的磁化都已被激励。如果步骤b.1)中的激励脉冲被构建为用于激励至少两个测量层中的所有,则步骤b.1)至d)的单次实施可能就已足够。此外,可以重复实施步骤b.1)。
22.在步骤d)中,在步骤b.1)至d)的每次实施中,分别可以读取检查体积的mr信号,以下也称为至少一个mr信号。读取相应的mr信号可以包括mr序列部段的输出,以用于读取相应的mr信号。在此,mr序列部段可以包括另外的hf脉冲、特别是激励脉冲和/或饱和脉冲的输出,和/或磁场梯度、例如读取梯度和/或相位编码梯度和/或层编码梯度和/或扰相梯度的输出。由此,可以对相应的mr信号特别是在k空间中进行位置编码。用于读取相应的mr信号的mr序列部段例如可以根据梯度回波序列(gre)和/或自旋回波序列(se)来预先给定。
23.由于在步骤b.1)至d)的每次实施中,通过步骤b.1)中的饱和模块的输出使相邻层的磁化饱和,因此可以有利地实现相邻层的磁化的伪连续饱和。由此,磁共振设备的结构规格(例如最大脉冲持续时间)和/或安全相关的边界值(例如比吸收率(sar))可以有利地得到遵守。此外,由此在相邻层内可以实现高饱和效率。在此,相邻层的磁化可以偏离平衡状态进入横向平面,特别是在预定数量的对步骤b.1)至d)的实施之后。
24.由此,可以实现对相邻层的磁化的特别低能量的并且同时有效的饱和。
25.通过步骤b.1)中相邻层的选择性饱和以及步骤c)中对至少两个测量层中的至少一个的选择性激励,可以有利地实现相应的mr信号主要具有至少两个测量层中的至少一个的信号分量。此外,通过相邻层的同时饱和和/或至少两个测量层中的至少一个的同时激励,可以实现缩短测量持续时间。
26.在步骤e)中重建来自至少两个测量层的mr图像数据可以有利地包括对至少一个mr信号的反傅里叶变换。由此,可以将至少一个mr信号从k空间转换为图像空间中的mr图像数据。
27.在步骤f)中提供mr图像数据例如可以包括计算机可读的存储介质上的存储和/或显示单元上的显示和/或到处理单元的传输。特别地,mr图像数据的图形表示可以显示在显示单元上。
28.所提出的方法能够实现对至少两个测量层以外的信号分量进行特别彻底的并且同时时间高效的抑制、特别是饱和。由此,可以根据所记录的mr信号重建并提供特别低伪影的mr图像数据。
29.在所提出的方法的另外的有利的实施方式中,饱和模块可以被构建为用于使相邻层内的血流的磁化饱和。
30.只要检查体积具有至少一个血管部段、特别是血管,就可以导致至少部分在检查体积内的流动运动、特别是血流。在此,流动运动尤其可以发生在至少两个测量层与相邻层中的至少一个之间。在此,可以导致相邻层中的一个的磁化传递、特别是流入到至少两个测量层中的一个。由于流动运动在相邻层与至少两个测量层之间传递磁化、特别是连续地传递磁化,流入的相邻层的磁化可能导致至少两个测量层的mr信号中出现伪影、特别是流动伪影。
31.饱和模块可以有利地被构建为使相邻层内的血流的磁化饱和,该磁化可以被传递到至少两个测量层中。与单个相邻层的磁化的顺序饱和相比,所提出的方法能够实现使所有的相邻层特别时间高效地、特别是同时地饱和。由于血流、特别地对来自相邻层的磁化的传递是取决于时间的,由此可以实现特别有效地减少至少两个测量层的mr信号中的流动伪影,并且因此也可以实现特别有效地减少mr图像数据中的流动伪影。
32.在所提出的方法的另外的有利的实施方式中,可以重复实施步骤a)至f)。在此,步
骤a)中的迄今的相邻层可以至少部分地被确定为测量层。由此可以实现对mr图像数据中检查体积的除了边缘层之外的完整的映射。有利地,边缘层的磁化可以进一步借助步骤b.1)中的饱和模块至少部分地饱和,以避免由于该磁化传递到各自邻接的测量层而产生的流动伪影。
33.有利地,针对各个后续重复,迄今的分别与两个测量层邻接的相邻层、特别是中间层可以在步骤a)中至少部分地、特别是完全地被确定为测量层。只要中间层具有与至少两个测量层的层厚度有偏差的层厚度,就可以有利地针对各个后续重复将这些中间层仅部分地、特别是按比例地确定为测量层。特别地,迄今的中间层的一部分可以分别被确定为测量层,该部分具有与迄今的测量层相同的层厚度。由此可以有利地实现沿着空间维度偏移了所定义的距离的迄今的激励脉冲可以用于在各个后续的重复中激励测量层的磁化,沿着该空间维度至少两个测量层排成一列。与此类似地,沿着空间维度偏移了所定义的距离的迄今的饱和模块可以用于在各个后续的重复中使相邻层的磁化饱和,沿着该空间维度至少两个测量层排成一列。
34.由此,能够实现通过对步骤a)至f)的每次重复分别读取至少一个mr信号来映射检查体积,其中,至少一个mr信号分别与测量层的包(英语:slice
‑
package)相对应。此外,通过在步骤a)至f)的重复中使相邻层的磁化饱和,可以特别有效地减少流动伪影。
35.在所提出的方法的另外的有利的实施方式中,饱和模块、特别是至少一个饱和脉冲可以具有空间饱和轮廓,该空间饱和轮廓依据至少两个测量层来确定。至少两个测量层并且特别地还有相邻层可以具有至少部分不同的层厚度和/或彼此之间的层距离。在此,饱和模块、特别是空间饱和轮廓可以依据至少两个测量层的层厚度和/或层距离来确定。饱和轮廓在此可以预先给定所饱和的磁化的空间分布,该饱和轮廓应当在步骤b.1)中通过输出饱和模块来实现。有利地,空间饱和轮廓可以被预先给定为使得相邻层的磁化可以通过输出饱和模块来选择性地几乎完全地被饱和。有利地,至少两个测量层的磁化可以保持几乎不受饱和模块的输出的影响和/或保持不改变。
36.由此,能够实现相邻层的磁化特别精确地饱和,并且由此抑制了mr图像数据中可能的流动伪影。
37.只要重复实施步骤a)至f),空间饱和轮廓就可以有利地依据相应重复的步骤a)中确定的测量层的相邻层来确定和/或调整。特别地,这在测量层的层厚度和/或层距离在步骤a)至f)的重复间、特别是依次的重复间发生变化的情况下是有利的。
38.只要层距离和/或层厚度在步骤a)至f)的重复、特别是依次的重复间保持不变,就可以在步骤a)至f)的相应后续重复中为饱和模块预先给定迄今的空间饱和轮廓,该空间饱和轮廓沿着空间维度偏移了所定义的距离,沿着该空间维度至少两个测量层排成一列。
39.为了实现饱和轮廓,可以使用空间调制准备(英语:spatially modulated preparation,spamp)技术,其功能类似于心肌成像中的空间磁化调制(英语:spatial modulation of magnetization,spamm)。有利地,空间调制准备技术可以被构建为用于根据预先给定的饱和轮廓对至少一个mr信号、特别是mr图像数据施加饱和图案,其中饱和图案具有平行的条纹,特别是与相邻层对应。在此所生成的饱和轮廓或饱和图案尤其可以遵循周期性函数,该周期性函数被拟合到相邻层中。在此,相对于待饱和的磁化而言,至少两个测量层被有利地排除在饱和轮廓之外。
40.在所提出的方法的另外的有利的实施方式中,激励脉冲可以具有空间激励轮廓,该空间激励轮廓依据至少两个测量层中的至少一个来确定。
41.至少两个测量层可以具有至少部分不同的层厚度和/或彼此之间的层距离。在此,激励脉冲、特别是空间激励轮廓可以依据至少两个测量层中的至少一个的层厚度和/或层距离来确定。激励轮廓在此可以预先给定所激励的磁化的空间分布,该激励轮廓应当在步骤c)中通过输出激励脉冲来实现。有利地,空间激励轮廓可以被预先给定为使得至少两个测量层中的至少一个的磁化可以通过输出激励脉冲来选择性地激励。有利地,相邻层和/或其余测量层的磁化可以保持几乎不受激励脉冲的输出的影响和/或保持不改变。特别地,对于步骤b.1)至d)的每次实施,可以预先给定匹配于至少两个测量层中的至少一个的用于激励脉冲的空间激励轮廓。
42.由此,能够实现针对后续读取mr信号特别精确地激励至少两个测量层中的至少一个的磁化。
43.只要重复实施步骤a)至f),空间激励轮廓就可以有利地依据相应重复步骤a)至f)中的步骤a)中确定的测量层来确定和/或调整。特别地,这在测量层的层厚度和/或层距离在步骤a)至f)的重复间、特别是依次的重复间发生变化的情况下是有利的。
44.只要层距离和/或层厚度在步骤a)至f)的重复、特别是依次的重复间保持不变,就可以在步骤a)至f)的相应后续重复中为激励脉冲预先给定迄今的空间激励轮廓,该空间激励轮廓沿着空间维度偏移了所定义的距离,沿着该空间维度至少两个测量层排成一列。
45.在所提出的方法的另外的有利的实施方式中,对饱和轮廓和激励轮廓的确定可以依据彼此地进行,使得至少对于相邻层来说实现了针对至少一个mr信号的预先给定的空间信号轮廓。在此,为了确定饱和轮廓和激励轮廓,可以考虑饱和模块的输出与激励脉冲的输出之间的相互作用,使得在步骤d)中读取mr信号时,至少针对相邻层、特别是还针对至少两个测量层中的至少一个,可以实现预先给定的空间信号轮廓。有利地,空间信号轮廓可以预先给定空间信号分布,该空间信号分布在相邻层的空间区域内不被超过。空间信号轮廓尤其可以特别是在考虑直至在步骤d)中读取mr信号为止的磁化的弛豫效应的情况下描述空间饱和轮廓和空间激励轮廓的组合、尤其是叠加。
46.此外,特别是在测量层与相邻层之间的边界区域,空间信号轮廓的预先给定能够实现相应的层的所饱和的磁化与所激励的磁化之间尽可能清晰并且精确的界定。
47.在所提出的方法的另外的有利的实施方式中,饱和模块还可以包括至少一个标记梯度。至少一个标记梯度例如可以被构建为读取梯度和/或相位编码梯度和/或层编码梯度。为此,标记梯度可以沿读取方向和/或相位编码方向和/或层编码方向输出。此外,至少一个饱和脉冲可以被构建为用于非选择性地使检查体积的磁化饱和。在此,至少一个标记梯度可以被构建为用于选择、特别是结构化由至少一个特别是非选择性的饱和脉冲所引起的检查体积中的饱和。至少一个标记梯度可以有利地被构建为用于对应于检查体积中的相邻层地生成特别是网格状的饱和轮廓。在示例性的实施方式中,饱和模块可以被构建为类似于dante(英语:delay alternating with nutation for tailored excitation,dante)准备。在此,饱和模块可以具有特别是相同构建的至少两个饱和脉冲,其可以被构建为短的硬hf脉冲(英语:hard rf pulse)。此外,至少一个标记梯度可以在时间上在至少两个饱和脉冲之间和/或同时输出。
48.至少一个标记梯度使相邻层能够选择性地饱和,特别是与至少一个饱和脉冲共同作用。由此能够实现简单地实施饱和模块。
49.在所提出的方法的另外的有利的实施方式中,饱和模块、特别是至少一个饱和脉冲和/或至少一个标记梯度和/或激励脉冲可以依据检查对象的组织参数和/或血流参数和/或弛豫参数来确定。
50.组织参数例如可以包括磁化率参数和/或生理参数和/或关于检查对象、特别是检查体积的至少一个组织的饱和转移率的信息。此外,血流参数例如可以包括关于气体含量、特别是氧含量(英语:blood oxygenation)的信息和/或关于流速的信息和/或关于流向的信息和/或关于体积流的信息。此外,弛豫参数可以包括关于检查对象的至少一个组织和/或血流的纵向和/或横向弛豫率的信息。有利地,以上所描述的参数可以是空间分辨的。由此能够特别是在考虑时间关键的效应的情况下实现对饱和模块和/或激励脉冲的特别精确的确定。依据组织参数和/或血流参数和/或弛豫参数的对饱和模块和/或激励脉冲的确定尤其可以包括调整脉冲持续时间和/或脉冲幅度和/或脉冲相位。有利地,直至重复输出饱和模块、特别是至少一个饱和脉冲和/或至少一个标记梯度为止的等待时间(英语:interpulse
‑
delay)可以依据检查对象的组织参数和/或血流参数和/或弛豫参数来预先给定。
51.以上所描述的参数例如可以根据接收到的检查对象的组织图来确定。替换地或附加地,以上所描述的参数可以根据用户输入、特别是记录协议来预先给定。有利地,由此可以实现充分地使相邻层的磁化饱和和/或至少两个测量层的磁化得到激励。
52.在所提出的方法的另外的有利的实施方式中,饱和模块可以具有小于90
°
的有效翻转角度。只要步骤b.1)至d)被多次实施以激励至少两个测量层中的所有测量层的磁化,相邻层的磁化就可以伪连续地借助饱和脉冲来饱和。在此,对于特别是重复地实施步骤b.1)至d),可以预先给定特别是相对于纵向弛豫时间(t1)相对较短的重复时间(tr)。由此,在至少一个饱和脉冲的重复输出期间,相邻层的磁化的饱和可以有利地随着步骤b.1)至d)的每次实施而增加。在对步骤b.1)至d)进行了预先给定的数量的特别是重复的实施之后,在对相邻层的磁化的饱和方面可以出现平衡状态(英语:steady
‑
state)。
53.有效翻转角度在此可以表示步骤b.1)中在饱和模块输出、特别是单次输出之后相邻层的磁化的翻转角度、特别是偏转角度。饱和模块的有效翻转角度尤其可以等于或不同于至少一个饱和脉冲的翻转角度。此外,饱和模块的有效翻转角度可以有利地依据检查对象的组织参数和/或血流参数和/或弛豫参数来预先给定。
54.由此,磁共振设备的结构规格(例如最大脉冲持续时间)和/或安全相关的边界值(例如比吸收率(sar))可以有利地得到遵守。此外,由此在相邻层内可以实现高饱和效率。此外,可以有利地减少用于记录mr图像数据的总测量持续时间。
55.在所提出的方法的另外的有利的实施方式中,该方法可以进一步包括步骤b.2),其中在步骤b.2)中至少输出一个扰相梯度(spoilergradient)。在此,步骤b.2)可以有利地在步骤b.1)之后以及步骤c)之前实施。此外,至少一个扰相梯度可以被构建为用于减少相邻层的磁化在横向平面中的相位相干性。此外,至少一个扰相梯度可以被构建为读取梯度、相位编码梯度或层编码梯度。此外,在步骤b.2)中,可以沿着其余空间维度中的至少一个来输出至少一个另外的扰相梯度。在此,至少一个扰相梯度和至少一个另外的扰相梯度可以
被特别是同时地输出。特别地,至少一个扰相梯度可以沿着层编码方向输出,并且至少一个另外的扰相梯度可以沿着读取方向和/或相位编码方向输出。类似于至少一个扰相梯度,至少一个另外的扰相梯度可以被构建为用于降低相邻层的磁化在横向平面中的相位相干性。有利地,可以依次地、特别是以任何顺序地和/或同时地和/或分别重复地实施步骤b.1)和b.2)。
56.由此,可以实现特别是在步骤c)中激励至少两个测量层中的至少一个的磁化之前,对相邻层的磁化的改善的、特别是选择性的饱和。
57.在所提出的方法的另外的有利的实施方式中,可以重复实施步骤b.1)和b.2)。依据所提出的方法的时间参数、例如步骤b.1)至d)的重复时间和/或至少一个饱和脉冲的脉冲持续时间和/或至少一个标记梯度的持续时间和/或检查对象的至少一个弛豫参数,单次实施步骤b.1)和b.2)可能不足以使相邻层的磁化达到饱和、特别是几乎完全地饱和。有利地,通过重复实施步骤b.1)和b.2),可以改善相邻层的磁化的饱和、特别是选择性的饱和。这在检查对象的待饱和区域的纵向弛豫时间(t1)短(特别是在步骤b.1)至d)的重复时间方面)的情况下是特别有利的。此外,步骤b.1)和b.2)的时间参数、特别是至少一个饱和脉冲的脉冲持续时间和/或至少一个标记梯度的持续时间和/或步骤b.1)和b.2)的重复时间和/或扰相梯度的持续时间可以依据所提出的方法的其余时间参数和/或依据检查对象的组织参数和/或血流参数和/或弛豫参数来预先给定。由此,可以确保相邻层的磁化的特别可靠的饱和。
58.在第二方面,本发明涉及一种磁共振设备,该磁共振设备被构建为用于实施所提出的用于饱和准备地记录mr图像数据的方法。在此,磁共振设备可以包括hf处理单元、梯度控制单元、序列控制单元和处理单元。在此特别地,磁共振设备的组件可以被构建为用于实施所提出的用于饱和准备地记录mr图像数据的方法的各个方法步骤。
59.为此,磁共振设备例如可以借助序列控制单元预先给定mr序列以饱和准备地记录mr图像数据。此外,mr序列可以包括输出hf脉冲、特别是激励脉冲和/或饱和脉冲,其中hf脉冲可以借助hf处理单元来输出。此外,mr序列可以包括输出磁场梯度、例如读取梯度和/或相位编码梯度和/或层编码梯度和/或扰相梯度,其中磁场梯度可以借助梯度控制单元来输出。在此,mr序列尤其可以预先给定用于记录至少一个mr信号的对k空间的采样。hf处理单元可以进一步被构建为用于采集至少一个mr信号并提供给处理单元。处理单元可以被构建为用于基于至少一个mr信号重建和/或提供来自至少两个测量层的mr图像数据。
60.此外,磁共振设备可以具有输入单元、例如键盘和/或指向单元,该输入单元被构建为用于采集用户输入。在此,处理单元可以被构建为用于基于用户输入来确定检查体积中的至少两个测量层。
61.此外,磁共振设备可以包括显示单元、例如显示器和/或监视器和/或led显示器,该显示单元被构建为用于显示磁共振设备和/或磁共振设备的另外的组件的信息和/或信息的图形表示和/或mr图像数据。
62.所提出的磁共振设备的优点基本上对应于所提出的用于饱和准备地记录mr图像数据的方法的优点。在此提到的特征、优点或替换的实施方式同样也可以被转用到另外的要求保护的内容,反之亦然。
63.在第三方面,本发明涉及一种计算机程序产品,该计算机程序产品具有可直接加
载到处理单元的存储器中的计算机程序,该计算机程序具有程序部段,以便当程序部段由处理单元实施时,实施所提出的用于饱和准备地记录mr图像数据的方法的所有步骤。在此,计算机程序产品可以包括具有源代码的软件或者可实施的软件代码,该源代码尚未被编译和连接或者该源代码仅还必须被说明,该可实施的软件代码为了实施仅需要被加载到处理单元中。通过计算机程序产品,可以借助处理单元快速、可相同重复并且鲁棒地实施用于饱和准备地记录mr图像数据的方法。计算机程序产品被配置为使得其可以借助处理单元实施根据本发明的方法步骤。
64.例如,计算机程序产品存储在计算机可读的存储介质上,或存储在网络或服务器上,从那里可以加载到处理单元的处理器中,该处理器可以直接与处理单元连接,或者可以被构建为处理单元的一部分。此外,计算机程序产品的控制信息可以存储在电子可读的数据载体上。电子可读的数据载体的控制信息可以被设计为使得在处理单元中使用数据载体时其执行根据本发明的方法。针对电子可读的数据载体的示例是dvd、磁带或u盘,在其上存储有电子可读的控制信息、特别是软件。当该控制信息从数据载体中读取并存储到处理单元中时,可以执行先前所描述的方法的所有根据本发明的实施方式。
65.本发明还可以涉及计算机可读的存储介质和/或电子可读的数据载体,在其上存储有可由处理单元读取并且实施的程序部段,以便当程序部段由处理单元实施时,实施用于饱和准备地记录mr图像数据的方法的所有步骤。
66.很大程度上以软件形式的实现具有如下优点:还可以通过软件更新以简单的方式改装迄今已经使用的处理单元,以便以根据本发明的方式工作。除了计算机程序之外,这种计算机程序产品必要时可以包括附加的组成部分、诸如文档和/或附加的组件,以及硬件组件、诸如用于使用软件的硬件密钥(加密狗等)。
附图说明
67.在附图中示出了本发明的实施例并且在下面对其进行更详细地描述。在不同的附图中,对于相同的特征使用了相同的附图标记。附图中:
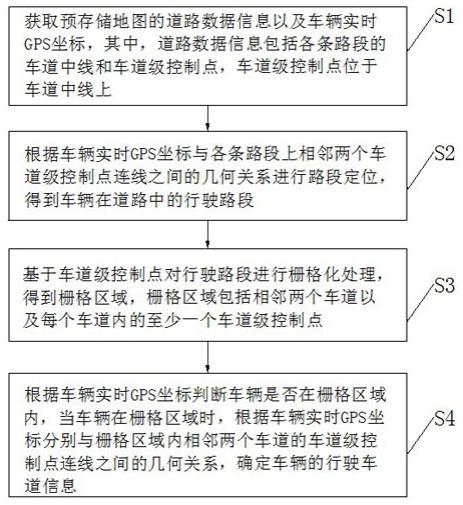
68.图1至图3示出了所提出的用于饱和准备地记录mr图像数据的方法的不同实施方式的示意图;
69.图4和图5示出了用于饱和准备地记录mr图像数据的不同的示例性mr序列的示意图;
70.图6示出了饱和轮廓和激励轮廓的示意图;
71.图7示出了磁共振设备的示意图。
具体实施方式
72.图1中示意性地示出了所提出的用于饱和准备地记录mr图像数据的方法的一种实施方式。在此,可以在第一步骤a)中在检查对象的检查体积mv中确定det
‑
ms至少两个测量层ms。在此,检查体积mv可以具有相邻层as,相邻层分别与至少两个测量层ms中的至少一个邻接。在第二步骤b.1)中,可以输出pl
‑
sm饱和模块,该饱和模块包括至少一个饱和脉冲,用于使相邻层as的磁化饱和。此外,在另外的步骤c)中,可以输出pl
‑
ep激励脉冲,用于激励至少两个测量层ms中的至少一个的磁化。此后,在步骤d)中,可以读取ro
‑
sig检查体积mv的mr
信号sig。在此,可以频繁、特别是重复地实施iter
‑
1步骤b.1)至d),直至终止条件a出现。终止条件a例如可以检查至少两个测量层ms中的所有测量层的磁化是否已经被激励。
73.激励脉冲可以被构建为用于激励、特别是同时激励至少两个测量层ms中的所有测量层的磁化。在该情况下,单次实施步骤b.1)至d)能够足以关于至少两个测量层ms中的所有测量层记录mr信号sig。替换地,可以实施、特别是重复地实施iter
‑
1步骤b.1)至d),直至已经关于至少两个测量层ms中的所有测量层记录了mr信号sig。有利地,可以在步骤b.1)至d)的各个后续实施iter
‑
1中预先给定至少两个测量层ms中的至少一个,使得其磁化迄今仍未被激励。
74.在终止条件a出现y后,在步骤e)中,可以基于至少一个mr信号sig重建reco
‑
im来自至少两个测量层ms的mr图像数据im。此后,可以在步骤f)中提供prov
‑
im mr图像数据im。
75.特别是,饱和模块可以被构建为使相邻层as内的血流的磁化饱和。此外,步骤b.1)中饱和模块sm的输出可以被称为饱和准备。
76.此外,饱和模块、特别是至少一个饱和脉冲,和/或激励脉冲可以依据检查对象的组织参数和/或血流参数和/或弛豫参数来确定。
77.图2示出了所提出的用于饱和准备地记录mr图像数据im的方法的另外的有利的实施方式。在此,可以重复地实施iter
‑
3步骤a)至f)。在此,步骤a)中的迄今的相邻层as可以至少部分地被确定det
‑
ms为测量层ms。
78.图3中示出了所提出的用于饱和准备地记录mr图像数据im的方法的另外的有利的实施方式。在此,该方法可以进一步包括步骤b.2),其中输出pl
‑
sg至少一个扰相梯度。此外,可以重复地实施iter
‑
2步骤b.1)和/或b.2)。
79.图4和图5示出了用于饱和准备地记录mr图像数据im的不同的示例性mr序列的示意图。在此,在时间走向t上示出了hf脉冲的输出、磁场梯度和至少一个mr信号的接收沿不同维度的走向。在此,rf表示hf脉冲的维度,ro表示用于输出读取梯度的读取维度,pe表示用于输出相位编码梯度的相位编码方向,并且gs表示用于输出层编码梯度的层编码方向。此外,adc表示至少一个mr信号的维度。在此,mr序列可以具有至少一个第一mr序列部段p1和至少一个第二mr序列部段p2,其中,第一mr序列部段p1包括至少一个饱和模块sm。
80.在第一mr序列部段p1内,可以实施步骤b.1)、特别是实施包括至少一个饱和脉冲sp的饱和模块sm的输出,并且可以实施步骤b.2),该步骤包括输出至少一个扰相梯度sg。在此,饱和模块sm可以具有小于90
°
的有效翻转角度。此外,包括输出至少一个激励脉冲ep的步骤c)和包括读取检查体积mv的mr信号sig的步骤d)可以在第二mr序列部段p2内实施。有利地,至少一个扰相梯度sg可以被构建为用于降低相邻层as的磁化在横向平面中的相位相干性。此外,至少一个扰相梯度sg可以被构建为层编码梯度。有利地,可以以任何顺序依次地和/或同时地实施步骤b.1)和b.2)。此外,在步骤b.2)中,可以输出至少一个另外的扰相梯度,特别是与至少一个扰相梯度sg同时输出,该至少一个另外的扰相梯度可以被构建为读取梯度sg'和/或相位编码梯度sg”。类似于至少一个扰相梯度sg,至少一个另外的扰相梯度sg'、sg”可以被构建为用于降低相邻层as的磁化在横向平面中的相位相干性。
81.第二mr序列部段p2可以包括输出另外的hf脉冲、特别是激励脉冲和/或饱和脉冲,和/或输出磁场梯度、例如读取梯度seg和/或相位编码梯度和/或层编码梯度和/或扰相梯度。由此,可以对相应的mr信号sig特别是在k空间中进行位置编码。用于读取相应的mr信号
sig的第二mr序列部段p2例如可以根据梯度回波序列(gre)和/或自旋回波序列(se)来预先给定。
82.在对至少两个测量层ms重复实施iter
‑
1步骤b.1)至d)时,可以借助饱和模块sm、特别是至少一个饱和脉冲sp,和/或至少一个扰相梯度sg和/或至少一个另外的扰相梯度sg'和/或sg”,使相邻层as的磁化伪连续地饱和。在此,对于重复地实施iter
‑
1步骤b.1)至d),可以特别地为实施步骤b.1)至d)预先给定特别是相对于纵向弛豫时间而言相对较短的重复时间tr2。由此,在饱和模块sm的重复输出期间,相邻层as的磁化的饱和可以有利地随着步骤b.1)至d)的每次实施iter
‑
1而增加。
83.此外,可以重复实施iter
‑
3步骤a)至f)、特别是至少一个第一mr序列部段p1和至少一个第二mr序列部段p2。在此,步骤a)至f)、特别是包括为激励至少两个测量层ms中的所有而实施的步骤b.1)至d)的所有重复iter
‑
1可以具有重复时间tr,其中步骤a)、e)和f)有利地不对重复时间tr作出贡献。
84.在此,图4示出了一种示例性的实施方式,其中至少一个饱和脉冲sp被构建为用于同时使相邻层as的磁化饱和。
85.图5示出了另外的示例性的实施方式,其中饱和模块sm还包括标记梯度tg。至少一个标记梯度tg例如可以被构建为读取梯度和/或相位编码梯度和/或层编码梯度。在此示出的实施例中,标记梯度tg可以沿着层编码方向gs输出。在此,饱和模块sm可以被构建为类似于dante(英语:delay alternating with nutation for tailored excitation,dante)准备。在此,饱和模块sm可以具有特别是相同构建的两个饱和脉冲sp和sp2,其可以被构建为短的硬hf脉冲(英语:hard rf pulse)。此外,标记梯度tg可以在时间上在两个饱和脉冲sp与sp2之间和/或同时输出。在此,饱和脉冲sp和sp2可以被构建为用于非选择性地使检查体积mv的磁化饱和。此外,标记梯度tg可以被构建为用于选择、特别是结构化由饱和脉冲sp和sp2引起的检查体积mv中的饱和。标记梯度tg可以有利地被构建为用于对应于检查体积mv中的相邻层as生成特别是网格状的饱和轮廓。
86.此外,步骤b.1)和b.2)的时间参数、特别是至少一个饱和脉冲sp的脉冲持续时间和/或至少一个标记梯度tg的持续时间和/或步骤b.1)和b.2)的重复时间tr1和/或至少一个扰相梯度sg的持续时间和/或至少一个另外的扰相梯度sg'、sg”的持续时间可以依据所提出的方法的其余时间参数和/或依据检查对象的组织参数和/或血流参数和/或弛豫参数来预先给定。
87.图6中示意性地示出了示例性的饱和轮廓spr和激励轮廓epr。有利地,饱和模块sm可以具有空间饱和轮廓spr,其依据至少两个测量层ms中的至少一个来确定。类似地,激励脉冲ep可以具有空间激励轮廓epr,其依据至少两个测量层ms中的至少一个来确定。此外,对饱和轮廓spr和激励轮廓epr的确定可以依据彼此来进行,使得至少对于相邻层as实现了对于mr信号sig的预先给定的空间信号轮廓。
88.此外,图6中示例性地示出了五个测量层ms1至ms5,五个测量层与六个相邻层as1至as6交错地沿着共同的空间维度sd特别是彼此平行地布置。在此,相邻层as1和as6可以被视为边缘层,并且相邻层as2至as5可以被视为中间层。包括测量层ms1至ms5和相邻层as1至as6的布置可以被称为层堆叠和/或层包。测量层ms1至ms5分别可以具有层厚度mst和彼此间的层距离msd。此外,相邻层可以具有层厚度ast和彼此间的层距离asd。
89.在所示出的实施例中,测量层ms1至ms6和相邻层as1至as6在层厚mst或ast以及层距离msd或asd方面可以分别相同地构建。在此,图示仅是示例性的,替换地,测量层ms1至ms6可以彼此和/或相对于相邻层as1至as5相同地或不同地构建。
90.空间饱和轮廓spr可以预先给定所饱和的磁化的空间分布,该空间饱和轮廓应当在步骤b.1)中通过输出饱和模块sm来实现。有利地,空间饱和轮廓spr可以被预先给定为使得相邻层as1至as6的磁化可以通过输出饱和模块sm来选择性地尽可能完全地饱和。在此所生成的饱和轮廓spr或饱和图案尤其可以遵循周期性函数,该周期性函数被拟合到相邻层as1至as6中。有利地,测量层ms1至ms5的磁化可以保持几乎不受饱和模块sm的输出的影响和/或保持不改变。
91.此外,图6示例性地针对测量层ms3示出了来自直接邻接的相邻层as3和as4的流入的流动运动if1和if2、特别是血流。有利地,相邻层as3和as4的磁化可以通过饱和模块sm的输出在步骤b.1)中被饱和,该磁化通过流动运动if1和if2传递到测量层ms3中。这也类似地适用于其余的测量层ms1至ms5和相邻层as1至as6。
92.此外,激励轮廓epr可以预先给定所激励的磁化的空间分布,该激励轮廓可以通过步骤c)中输出激励脉冲ep来实现。有利地,空间激励轮廓epr可以被预先给定为使得测量层ms1至ms5的磁化可以通过输出激励脉冲ep来选择性地激励。有利地,相邻层as1至as6的磁化可以保持几乎不受激励脉冲ep的输出的影响和/或保持不改变。
93.对饱和轮廓spr和/或激励轮廓epr和/或信号轮廓的预先给定可以手动地和/或半自动地和/或自动地进行,特别是基于步骤a)中确定的至少两个测量层ms。
94.对于激励脉冲ep和/或至少一个饱和脉冲sp的空间调制,例如可以采用用于多层激励的方法,例如,对预先给定的层数进行独立于能量的同时的激励(英语:power independent number of slices,pins)的hf脉冲。这些方法在使相邻层as1至as6的磁化饱和方面可以得到有利的调整和应用。
95.图7中示意性地示出了所提出的磁共振设备7的一种实施方式,该磁共振设备被构建为用于实施所提出的方法。在此,磁共振设备7包括磁体单元6和检查区域14。磁体单元6在此还包括超导的基本磁体11,该基本磁体被构建为用于产生强的主磁场15,该主磁场具有时间上恒定的主磁场强度。特别地,检查区域14可以具有圆柱体形状,其中检查区域14可以沿圆柱体的外罩面被磁体单元6所包围。在此,检查区域14具有至少一个开口,用于容纳检查对象1和支承装置2。支承装置2被可移动地安装,使得可以实现将检查对象1从磁共振设备7之外的位置定位到检查区域14中。在此,支承装置2可以由支承台3支承并移动、特别是电动和/或自动地移动。为此,处理单元20可以向支承台3发送信号37。反之,通过由处理单元20从支承台3查询信号37,可以实现由对支承装置2、特别是检查对象1的当前定位的查询。
96.此外,磁体单元6包括梯度线圈单元12,该梯度线圈单元被构建为用于生成磁场梯度,特别是读取梯度和/或相位编码梯度和/或层编码梯度,以在图像记录中进行位置编码。对梯度线圈单元12的控制可以借助梯度控制单元22来进行。为此,梯度控制单元22可以向梯度线圈单元12馈入可变电流32。
97.此外,磁体单元6具有hf天线单元13,该hf天线单元在所提出的实施例中被构建为身体线圈。在此,hf天线单元13固定地集成到磁体单元6中,并且围绕检查区域14。hf天线单
元13被构建为用于偏转磁化。磁化是作为净磁化出现,其中在平衡状态下,核自旋在主磁场15中平行对齐。特别地,可以通过输出hf脉冲、特别是激励脉冲ep和/或饱和脉冲sp来激励核自旋的极化。此外,hf天线单元13可以通过来自hf处理单元21的信号31来控制。此外,hf天线单元13被构建为用于接收mr信号sig。在此,hf天线单元13可以向hf处理单元21发送对应的信号31。对梯度控制单元22、hf处理单元21和基本磁体6的控制可以特别地通过磁共振设备7的处理单元20来进行。为此,信号33和34可以双向使用。替换地或附加地,至少一个mr信号sig可以借助mr局部线圈(在此未示出)来接收,该mr局部线圈在检查区域14内布置在检查对象1上。为此,mr局部线圈可以向hf处理单元21发送对应的信号。
98.有利地,处理单元20可以包括序列控制单元,该序列控制单元被构建为用于将例如用于饱和准备地记录mr图像数据im的mr序列转化为用于磁共振设备7的相应组件的信号。由此,能够在对检查对象1进行mr检查时实现对mr序列的执行。此外,处理单元20可以被构建为用于处理由hf天线单元13接收的mr信号sig,并且据此重建mr图像数据im。
99.磁共振设备7例如可以借助序列控制单元实施mr序列,该mr序列用于饱和准备地记录mr图像数据im。此外,mr序列可以包括输出hf脉冲、特别是激励脉冲ep和/或饱和脉冲sp,其中hf脉冲可以借助hf天线单元13来输出。此外,mr序列可以包括输出磁场梯度、例如读取梯度和/或相位编码梯度和/或层编码梯度和/或扰相梯度sg、sg'和/或sg”,其中磁场梯度可以借助梯度线圈单元12来输出。在此,mr序列可以预先给定用于记录至少一个mr信号sig的对k空间的采样。hf天线单元13可以进一步被构建为用于采集至少一个mr信号sig并将其提供给hf处理单元21或处理单元20。处理单元20可以被构建为用于基于至少一个mr信号sig重建reco
‑
im和/或提供prov
‑
im来自至少两个测量层ms的mr图像数据im。
100.此外,所提出的磁共振设备7包括显示单元23,该显示单元被构建为用于显示mr序列的参数值和/或mr图像数据。为此,处理单元20可以向显示单元23发送信号35。在此,显示单元23可以被构建为监视器和/或显示器。此外,磁共振设备7可以包括输入单元24、例如键盘和/或触摸屏和/或按钮装置,该输入单元被构建为用于通过信号36将用户的输入发送到处理单元20。输入单元24可以至少部分地集成到显示单元23中,例如作为电容式和/或电阻式输入显示器。例如,可以由用户借助输入单元24来输入和/或调整mr序列的参数和/或参数值、例如翻转角度和/或脉冲持续时间。此外,检查体积mv和/或至少两个测量层ms和/或相邻层as和/或饱和轮廓spr和/或激励轮廓epr和/或信号轮廓可以通过输入单元24上的用户输入来预先给定。
101.同样地,可以通过用户在输入单元24上的输入来实现对支承装置2的控制。在此,处理单元20可以向支承台3发送信号37,由此能够实现检查对象1相对于磁共振设备7的对称中心的自动和/或半自动的定位。
102.包含在所描述的附图中的示意性图示未描绘任何比例或尺寸比。
103.最后,再次指出,上面详细描述的方法以及所示的设备仅仅是实施例,本领域技术人员可以以非常不同的方式对其进行修改,而不脱离本发明的范围。此外,不定冠词“一”或“一个”的使用不排除所涉及的特征也可以多次存在。同样地,术语“单元”和“元件”不排除所涉及的组件由多个共同作用的部分组件构成,这些部分组件必要时也可以空间地分布。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。