1.本说明书总体上涉及附肢按摩装置,并且特别地涉及包含用于提供选择性压力以对使用者进行治疗性按摩的人造肌肉的附肢按摩装置。
背景技术:
2.治疗性按摩为一种有助于减轻疼痛和减小应力的按摩方式。一个示例性治疗性按摩为深层组织按摩,所述深层组织按摩可以被用来分解疤痕组织并且改善血液循环。其它示例性治疗性按摩包含神经肌肉按摩、肌筋膜按摩、触发点治疗、以及运动按摩。用于提供治疗性按摩的当前技术包含气动驱动的或电动马达驱动的按摩装置。然而,这些按摩装置复杂、笨重并且不便于携带。
3.因此,需要一种改进的按摩装置,所述按摩装置为矮型的同时能够对使用者施加选择性的强压力。
技术实现要素:
4.在一个实施例中,一种附肢按摩装置包含具有内带和外层的附肢包裹物以及设置于所述附肢包裹物的内带与外层之间的一个或多个人造肌肉。所述一个或多个人造肌肉中的每一个包含:壳体,所述壳体具有电极区域和可膨胀流体区域;容纳于所述壳体内的电介质流体;以及定位于所述壳体的电极区域中的电极对。所述电极对包含固定至所述壳体的第一表面的第一电极以及固定至所述壳体的第二表面的第二电极。所述电极对可在非致动状态与致动状态之间致动,以使得从所述非致动状态至所述致动状态的致动将所述电介质流体引导至所述可膨胀流体区域中,从而使所述可膨胀流体区域膨胀,从而对附肢包裹物的内带施加压力。
5.在另一个实施例中,一种附肢按摩装置包含具有内带和外层的附肢包裹物以及设置于所述附肢包裹物的内带与外层之间的多个人造肌肉叠层。所述多个人造肌肉叠层中的每一个人造肌肉包含:壳体,所述壳体具有电极区域和可膨胀流体区域;容纳于所述壳体内的电介质流体;以及定位于所述壳体的电极区域中的电极对。所述电极对包括固定至所述壳体的第一表面的第一电极和固定至所述壳体的第二表面的第二电极。所述电极对可在非致动状态与致动状态之间致动,以使得从所述非致动状态至所述致动状态的致动将所述电介质流体引导至所述可膨胀流体区域中。进一步,所述多个人造肌肉叠层中的每一个可被独立地致动以对所述附肢包裹物的内带施加选择性压力。
6.在又一个实施例中,一种用于致动附肢按摩装置的方法,包含:使用电联接至人造肌肉的电极对的电源生成电压。所述人造肌肉设置于附肢包裹物的内带与外层之间。所述人造肌肉包含具有电极区域和可膨胀流体区域的壳体。所述电极对定位于所述壳体的电极区域中。所述电极对包含固定至所述壳体的第一表面的第一电极以及固定至所述壳体的第二表面的第二电极。电介质流体被容纳于所述壳体内。所述方法还包含将所述电压施加至所述人造肌肉的电极对,从而将所述电极对从非致动状态致动至致动状态,以使得所述电
介质流体被引导至所述壳体的可膨胀流体区域中并且使所述可膨胀流体区域膨胀,从而对所述附肢包裹物的内带施加压力。
7.结合附图,根据以下详细描述,将更充分地理解由本文中所描述的实施例所提供的这些特征和额外的特征。
附图说明
8.附图中所阐述的实施例本质上为示例说明性的和示例性的,并且不旨在限制由权利要求所限定的主题。当结合以下附图阅读时,可以理解示例说明性实施例的以下详细描述,其中相同的结构用相同的附图标记表示并且其中:
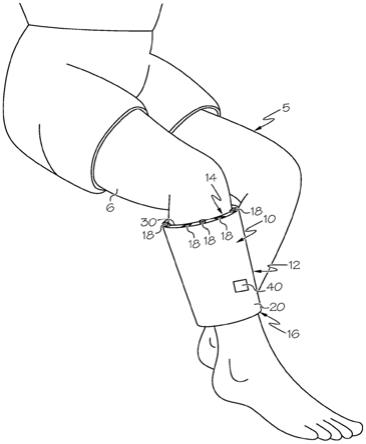
9.图1示意性地描绘根据本文中所示出和描述的一个或多个实施例的定位于使用者上的一种附肢按摩装置;
10.图2a示意性地描绘图1的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的横截面,其中示出处于非致动状态中的附肢按摩装置的多个人造肌肉;
11.图2b示意性地描绘图1的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的横截面,其中示出处于致动状态中的附肢按摩装置的多个人造肌肉;
12.图2c示意性地描绘图1的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的横截面,其中示出处于致动状态中的附肢按摩装置的多个人造肌肉中的一些以及处于非致动状态中的附肢按摩装置的多个人造肌肉中的一些;
13.图3a示意性地描绘根据本文中所示出和描述的一个或多个实施例的、具有处于非致动状态中的单个人造肌肉的附肢按摩装置的一个实施例的横截面;
14.图3b示意性地描绘图3a的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的横截面,其中单个人造肌肉处于致动状态中;
15.图3c示意性地描绘根据本文中所示出和描述的一个或多个实施例的、定位于使用者上的附肢按摩装置,所述附肢按摩装置包含多个附肢包裹物;
16.图4示意性地描绘图1的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的示例性人造肌肉的分解图;
17.图5示意性地描绘图3的、根据本文中所示出和描述的一个或多个实施例的人造肌肉的顶视图;
18.图6示意性地描绘图4的、根据本文中所示出和描述的一个或多个实施例的处于非致动状态中的人造肌肉的沿着图5中的线6
‑
6剖开的横截面图;
19.图7示意性地描绘图4的、根据本文中所示出和描述的一个或多个实施例的处于致动状态中的人造肌肉的沿着图5中的线6
‑
6剖开的横截面图;
20.图8示意性地描绘根据本文中所示出和描述的一个或多个实施例的处于非致动状态中的另一种示例说明性人造肌肉的横截面图;
21.图9示意性地描绘图8的、根据本文中所示出和描述的一个或多个实施例的处于致动状态中的人造肌肉的横截面图;以及
22.图10示意性地描绘用于操作图1的、根据本文中所示出和描述的一个或多个实施例的附肢按摩装置的致动系统。
具体实施方式
23.本文中所描述的实施例涉及一种附肢按摩装置,所述附肢按摩装置包含被构造成对使用者的附肢施加选择性压力的一个或多个人造肌肉。本文中所描述的附肢按摩装置包含具有内带和外层的附肢包裹物,以及设置于内带与外层之间的空腔中的一个或多个人造肌肉。设置于所述附肢包裹物的空腔中的一个或多个人造肌肉为可致动的,以选择性地升高和降低人造肌肉的区域以提供一种选择性的、按需膨大的可膨胀流体区域。特别地,一个或多个人造肌肉各自包含电极对,可以通过施加电压而将所述电极对拉在一起,从而将电介质流体推动至可膨胀流体区域中,这对附肢包裹物的内带施加局部压力。进一步,内带由弹性材料形成,以使得内带可以适应附肢的特定的形状。因此,对所述附肢按摩装置的一个或多个人造肌肉的致动可以使用低矮的但强力的按摩装置对使用者的附肢施加选择性的且可定制的压力。在本文中更详细地描述附肢按摩装置的各种实施例和附肢按摩装置的操作。在任何可能的情况下,在所有附图中将使用相同的附图标记来指代相同的或相似的部件。
24.现在参考图1
‑
2c,示意性地描绘附肢按摩装置10。在图1中,附肢按摩装置10被放置于使用者5的附肢6上。在图2a
‑
2c中,示出处于各种致动状态中的附肢按摩装置10的示意性横截面。附肢按摩装置10包含附肢包裹物12,所述附肢包裹物具有外层20、内带30以及设置于外层20与内带30之间的空腔15。附肢按摩装置10还包含一个或多个人造肌肉101,所述人造肌肉例如在空腔15中设置于附肢包裹物12的内带30与外层20之间。在图2a
‑
2c中所示的实施例中,每个人造肌肉101为多个人造肌肉100中的一个。特别地,图2a
‑
2c中的多个人造肌肉100布置于多个人造肌肉叠层102中。然而,预期其中单个人造肌肉101包围内带30设置于空腔15中的实施例,比如图3a和3b中所示的实施例。而且,与图2a
‑
2c的人造肌肉叠层102相比,预期具有以单个层布置于空腔15内的多个人造肌肉100的实施例。在操作中,一个或多个人造肌肉101为可致动的,以膨胀并且对附肢包裹物12的内带30施加压力。当附肢包裹物12被穿戴时,对内带30的该压力致使内带30对使用者5施加选择性压力。此外,一个或多个人造肌肉101的致动可以由致动系统400(图10)控制,所述致动系统可以包含容纳于联接至附肢包裹物12的机载控制单元40中的构件。
25.仍然参考图1
‑
2c,内带30包括面对空腔15的内表面32和面对附肢开口25的外表面34。内表面32可以接触至少一个人造肌肉101,并且当被穿戴时,外表面34可以接触使用者的附肢6。外层20包括面对空腔15的内表面22以及从附肢包裹物12面向外的外表面24。外层20的内表面22可以接触至少一个人造肌肉101。内带30包括弹性材料,以使得当被穿戴时,内带30可以符合使用者5的附肢6的轮廓。外层20包括比内带30更刚硬的材料,比如刚性塑料或聚合物材料,以使得当一个或多个人造肌肉101被致动并且压靠内带30和外层20两者时,内带30比外层20更大程度地变形(实际上,外层20可能根部不变形),以使得压力被施加至使用者5的附肢。因为外层20比内带30更刚硬,所以外层20包括比内带30更高的杨氏模量。
26.现在参考图2a
‑
2c,示出附肢按摩装置10的横截面图,其中每个人造肌肉101处于非致动状态(图2a)中,每个人造肌肉101处于致动状态(图2b)中,以及一些人造肌肉101处于非致动状态中而其它人造肌肉101处于致动状态(图2c)中。在图2a
‑
2c中,多个人造肌肉100布置于多个人造肌肉叠层102中。这些示例说明性实施例包括八个人造肌肉叠层102a
‑
102h,但是应当理解的是,可预期任何数量的人造肌肉叠层102。确实,由于图2a
‑
2c为横截面,所以它们在附肢包裹物12的第一端14与第二端16之间的一个横截面位置处描绘人造肌肉叠层102,并且因此应当理解的是,该径向阵列的人造肌肉叠层102可以沿着附肢包裹物12的长度从第一端14至第二端16重复一次或多次(或在多个离散的附肢包裹物12中重复,比如图3c中所描绘的附肢包裹物12a
‑
12j)。在某些实施例中,多个人造肌肉101可以均匀地布置于内带30与外层20之间,从而沿着附肢包裹物12的长度从第一端14至第二端16在一个或多个纵向位置处以均匀的径向阵列环绕内带30。在某些实施例中,多个人造肌肉叠层102中的每一个的每一个人造肌肉101的可膨胀流体区域196彼此同轴地对准。然而,在其它实施例中,在多个人造肌肉叠层102中的至少一些人造肌肉101的可膨胀流体区域196之间可能存在一些偏移。而且,尽管图2a
‑
2c描绘多个人造肌肉叠层102,但是可预期其中多个人造肌肉100以单个层布置于空腔15内的实施例。该单个层可以包括径向阵列的多个人造肌肉101,其沿着附肢包裹物12的长度从第一端14至第二端16在一个或多个纵向位置处环绕内带30(均匀地或非均匀地)。
27.一个或多个人造肌肉101各自包含与电介质流体198一起设置于壳体110中的电极对104(图4
‑
9)。电极对104邻近于可膨胀流体区域196设置于壳体110的电极区域194中。在操作中,可以将电压施加至电极对104,从而将电极对104拉在一起,这将电介质流体引导至可膨胀流体区域196中,从而使可膨胀流体区域196膨胀。在图2a中,一个或多个人造肌肉101各自处于非致动状态中。当多个人造肌肉100未被致动时,附肢开口25包括非致动半径r
n
并且空腔15包括非致动厚度c
n
。当多个人造肌肉100被致动时,附肢开口25包括致动半径r
a
并且空腔15包括致动厚度c
a
。由于多个人造肌肉100的致动向内按压内带30,所以致动半径r
a
小于非致动半径r
n
并且空腔15的致动厚度c
a
大于空腔15的非致动厚度c
n
。在操作中,当使用者5穿戴附肢包裹物12时,内带30的由一个或多个人造肌肉101的致动而引起的该径向压缩对使用者5的附肢6施加压力。
28.尽管图2a和2b示出附肢包裹物12的横截面的完全的非致动状态(图2a)以及附肢包裹物12的横截面的完全的致动状态(图2b),但是应当理解的是,每个单独的人造肌肉101和每个单独的人造肌肉叠层102可以被独立地致动以对使用者5的附肢6提供选择性压力。图2c示意性地描绘这样的独立的致动。在图2c中,第三人造肌肉叠层102c和第七人造肌肉叠层102g处于致动状态中并且其余的人造肌肉叠层(亦即,第一人造肌肉叠层102a、第二人造肌肉叠层102b、第四人造肌肉叠层102d、第五人造肌肉叠层102e、第六人造肌肉叠层102f、以及第八人造肌肉叠层102h)处于非致动状态中。因此,图2c中所描绘的示例中的附肢开口25具有多个半径。特别地,图2c中的附肢开口25具有带有致动半径r
a
的部分(亦即,与第三和第七人造肌肉叠层102c、102g对准的部分)以及带有非致动半径r
n
的部分(亦即,与其余的人造肌肉叠层对准的部分)。
29.现在参考图3a和3b,描绘包括单个人造肌肉101的附肢按摩装置10的实施例。在该实施例中,单个人造肌肉可以围绕内带30的圆周的至少大部分,并且单个人造肌肉101的致动对内带30施加压力,从而在穿戴时对使用者5施加压力。在某些实施例中,包括单个人造肌肉101的附肢按摩装置10可以被设计成用于与较小的附肢(比如手指或手腕)一起使用。然而,应当理解的是,包括单个人造肌肉101的附肢按摩装置10的实施例可以为任何大小。而且,由于图3a和3b为横截面,所以它们在附肢包裹物12的第一端14与第二端16之间的一
个横截面位置处描绘单个人造肌肉101。尽管预期具有仅仅一个人造肌肉101的实施例,但是也可预期具有多个人造肌肉100的实施例,其中多个单个的人造肌肉101沿着附肢包裹物12的长度从第一端14至第二端16以重复的方式围绕内带30设置于空腔15中。这形成多个人造肌肉100的另一种单层布置。
30.现在参考图1和3c,在某些实施例中,附肢包裹物12的外层20(例如,附肢包裹物12的外层20的内径)为可调节的,以适应各种不同的附肢大小。这种可调节性可以通过多种机械特征来实现,比如可调节的带条。另外,尽管在图1中描绘单个附肢包裹物12,但是可预期包括多个附肢包裹物12的附肢按摩装置10的实施例。例如,图3c描绘包括十个附肢包裹物12a
‑
12j的附肢按摩装置10的实施例,所述十个附肢包裹物12a
‑
12j沿着使用者5的附肢6相邻地布置。在图3c中,针对第一附肢包裹物12a标注内带30、外层20、机载控制单元40以及第一和第二端14、16,但是应当理解的是,每个附肢包裹物12a
‑
12j均可以包括这些部分。此外,每个附肢包裹物12a
‑
12j可以包括一个或多个人造肌肉101。例如,每个附肢包裹物12a
‑
12j可以包括单个人造肌肉101(如图3a和3b中所描绘的)、单层阵列的多个人造肌肉101、单个人造肌肉叠层102、或一个阵列的人造肌肉叠层102(如图2a
‑
2c中所描绘的)。
31.仍然参考图1和3c,每个附肢包裹物12的第一端14和第二端16中的一者或两者可以包含一个或多个互连件18,所述互连件18被构造成与另一个附肢包裹物12附接在一起(比如在图3c中,第一附肢包裹物12a被附接至第二附肢包裹物12b)。互连件18可以促进物理连接性和/或电连接性。因此,多个附肢包裹物12(例如,图3c中的附肢包裹物12a
‑
12j)可以以模块化方式联接在一起,从而容许附肢按摩装置10具有各种长度。互连件18还促进附肢包裹物12a
‑
12j之间的通信联接,从而容许每个附肢包裹物12a
‑
12j的一个或多个人造肌肉101的协调操作以执行各种按摩操作。其它实施例可以包含多个附肢包裹物(例如,12a
‑
12j),而没有被构造成相邻地设置于使用者5的附肢6上的互连件18。在这些实施例中,每个附肢包裹物(例如,12a
‑
12j)的机载控制单元40可以通信以促进每个附肢包裹物12的一个或多个人造肌肉101的协调操作,以执行各种按摩操作。
32.现在参考图1
‑
3b,附肢按摩装置10为可操作的以通过致动一个或多个人造肌肉101来对使用者5的附肢6施加选择性压力。为了致动附肢按摩装置10,可以将电压选择性地施加至一个或多个人造肌肉101,从而使被致动的人造肌肉101的可膨胀流体区域196膨胀。在某些实施例中,一个或多个人造肌肉101中的每一个可被独立地致动以对附肢包裹物12的内带30施加选择性压力,所述附肢包裹物12在被穿戴时对使用者5的附肢6施加选择性压力。在包括多个人造肌肉叠层102的实施例中,每个人造肌肉叠层102可以被独立地致动。而且,单个人造肌肉叠层102的人造肌肉101也可以被独立地致动,从而容许基于单个人造肌肉叠层102的被致动的单独的人造肌肉101的数量而改变由单个人造肌肉叠层102所施加的位移行程。这有助于对使用者5施加选择性的压力深度。
33.一个或多个人造肌肉101可以沿附肢6的长度串联组合,并且通过对一个或多个人造肌肉101选择性地施加电压而被以级联的、图案化的、随机的或均匀的节律致动。在包括多个附肢包裹物12的实施例中,附肢包裹物12可以沿附肢的长度串联组合,并且类似地通过以协调的方式对每一个附肢包裹物12的一个或多个人造肌肉101选择性地施加电压而被以级联的、图案化的、随机的或均匀的节律致动。例如,在级联的节律的操作中,可以以选择性的方式对一个或多个人造肌肉101施加电压,以从附肢包裹物12的第一端至附肢包裹物
12的第二端以顺序方式或沿着相邻地设置于使用者5的附肢6上的多个附肢包裹物12依序致动一个或多个人造肌肉101的子集(例如,人造肌肉101的径向阵列)。
34.现在参考图4和5,更详细地描绘附肢按摩装置10的示例性人造肌肉101。人造肌肉101包含壳体110、固定至壳体110的相对的表面的电极对104,所述电极对104包含第一电极106和第二电极108、固定至第一电极106的第一电绝缘体层111以及固定至第二电极108的第二电绝缘体层112。在某些实施例中,壳体110为一体式整体层,所述一体式整体层包含一对相对的内表面(比如第一内表面114和第二内表面116)以及一对相对的外表面(比如第一外表面118和第二外表面120)。在某些实施例中,壳体110的第一内表面114和第二内表面116为可热密封的。在其它实施例中,壳体110可以为一对单独地制造的膜层,比如第一膜层122和第二膜层124。因此,第一膜层122包含第一内表面114和第一外表面118,并且第二膜层124包含第二内表面116和第二外表面120。
35.尽管本文中所描述的实施例主要涉及包括第一膜层122和第二膜层124的壳体110,而不是一体式壳体,但是应当理解的是,可预期任一种布置。在某些实施例中,第一膜层122和第二膜层124通常包含相同的结构和组成。例如,在某些实施例中,第一膜层122和第二膜层124各自包括双轴向地定向的聚丙烯。
36.第一电极106和第二电极108各自定位于第一膜层122与第二膜层124之间。在某些实施例中,第一电极106和第二电极108各自为铝涂覆的聚酯,例如,另外,第一电极106和第二电极108中的一个为带负电的电极,并且第一电极106和第二电极108中的另一个为带正电的电极。出于本文中所讨论的目的,第一电极106、第二电极108中的任一个可以为带正电的,只要人造肌肉101的第一电极106、第二电极108中的另一个为带负电的。
37.第一电极106具有面向膜的表面126和相对的内表面128。第一电极106抵靠第一膜层122、具体地第一膜层122的第一内表面114定位。另外,第一电极106包含第一端子130,所述第一端子130从第一电极106延伸超过第一膜层122的边缘,以使得第一端子130可以连接至电源以致动第一电极106。具体地,如图10中所示,端子直接地或串联地联接至电源以及致动系统400的控制器。类似地,第二电极108具有面向膜的表面148以及相对的内表面150。第二电极108抵靠第二膜层124、具体地第二膜层124的第二内表面116定位。第二电极108包含第二端子152,所述第二端子152从第二电极108延伸超过第二膜层124的边缘,以使得第二端子152可以连接至电源和致动系统400的控制器以致动第二电极108。
38.第一电极106包含两个或更多个接片部分132以及两个或更多个桥接部分140。每个桥接部分140定位于相邻的接片部分132之间,从而使这些相邻的接片部分132互连。每个接片部分132具有第一端134,所述第一端134相对于第一电极106的中心轴线c径向地延伸至接片部分132的相对的第二端136,其中第二端136限定第一电极106的外周边138的一部分。每个桥接部分140具有第一端142,所述第一端142相对于第一电极106的中心轴线c径向地延伸至桥接部分140的相对的第二端144,从而限定第一电极106的外周边138的另一个部分。每个接片部分132具有接片长度l1,并且每个桥接部分140具有沿径向方向相对于第一电极106的中心轴线c延伸的桥接长度l2。接片长度l1为从接片部分132的第一端134至第二端136的距离并且桥接长度l2为从桥接部分140的第一端142至第二端144的距离。每个接片部分132的接片长度l1比每个桥接部分140的桥接长度l2长。在某些实施例中,桥接长度l2为接片长度l1的20%至50%,比如接片长度l1的30%至40%。
39.在某些实施例中,两个或更多个接片部分132被布置于一对或多对接片部分132中。每一对接片部分132包含彼此直径地相对地布置的两个接片部分132。在某些实施例中,第一电极106可以包含定位于第一电极106的相对的侧或端上的仅仅两个接片部分132。在某些实施例中,如图4和5中所示,第一电极106包含四个接片部分132以及使相邻的接片部分132互连的四个桥接部分140。在该实施例中,四个接片部分132被布置成彼此直径地相对的两对接片部分132。此外,如图所示,第一端子130从接片部分132中的一个的第二端136延伸并且与第二端136一体地形成。
40.与第一电极106相似,第二电极108包含至少一对接片部分154和两个或更多个桥接部分162。每个桥接部分162定位于相邻的接片部分154之间,从而使这些相邻的接片部分154互连。每个接片部分154具有第一端156,所述第一端156相对于第二电极108的中心轴线c径向地延伸至接片部分154的相对的第二端158,其中第二端158限定第二电极108的外周边160的一部分。由于第一电极106和第二电极108彼此同轴,所以第一电极106和第二电极108的中心轴线c为相同的。每个桥接部分162具有第一端164,所述第一端164相对于第二电极的中心轴线c径向地延伸至桥接部分162的相对的第二端166,从而限定第二电极108的外周边160的另一个部分。每个接片部分154具有接片长度l3并且每个桥接部分162具有相对于第二电极108的中心轴线c沿径向方向延伸的桥接长度l4。接片长度l3为从接片部分154的第一端156至第二端158的距离并且桥接长度l4为从桥接部分162的第一端164至第二端166的距离。接片长度l3比每一个桥接部分162的桥接长度l4长。在某些实施例中,桥接长度l4为接片长度l3的20%至50%、比如接片长度l3的30%至40%。
41.在某些实施例中,两个或更多个接片部分154布置于一对或多对接片部分154中。每一对接片部分154包含彼此直径地相对地布置的两个接片部分154。在某些实施例中,第二电极108可以包含定位于第一电极106的相对的侧或端上的仅仅两个接片部分154。在某些实施例中,如图4和5中所示,第二电极108包含四个接片部分154以及使相邻的接片部分154互连的四个桥接部分162。在该实施例中,四个接片部分154被布置成彼此直径地相对的两对接片部分154。此外,如图所示,第二端子152从接片部分154中的一个的第二端158延伸并且与第二端158一体地形成。
42.现在参考图4
‑
9,第一电极106和第二电极108中的至少一个具有在接片部分132的第一端134与桥接部分140的第一端142之间形成于其中的中心开口。在图6和7中,第一电极106具有中心开口146。然而,应当理解的是,当在第二电极108内设置中心开口时,第一电极106不需要包含中心开口146,如图8和9中所示。替代地,当在第一电极106内设置中心开口146时,第二电极108不需要包含中心开口。仍然参考图4
‑
9,第一电绝缘体层111和第二电绝缘体层112具有分别对应于第一电极106和第二电极108的几何形状。因此,第一电绝缘体层111和第二电绝缘体层112各自具有对应于第一电极106和第二电极108上的类似的部分的接片部分170、172和桥接部分174、176。进一步,第一电绝缘体层111和第二电绝缘体层112各自具有外周边178、180,所述外周边178、180在定位于第一电极106的外周边138和第二电极108的外周边160上时分别对应于第一电极106的外周边138和第二电极108的外周边160。
43.应当理解的是,在某些实施例中,第一电绝缘体层111和第二电绝缘体层112通常包含相同的结构和组成。这样,在某些实施例中,第一电绝缘体层111和第二电绝缘体层112各自分别包含粘合表面182、184以及相对的不可密封表面186、188。因此,在某些实施例中,
第一电绝缘体层111和第二电绝缘体层112各自为分别粘附至第一电极106的内表面128以及第二电极108的内表面150的聚合物带条。
44.现在参考图5
‑
9,示出处于组装形式中的人造肌肉101,其中第一电极106的第一端子130和第二电极108的第二端子152延伸超过壳体110、亦即第一膜层122和第二膜层124的外周边。如图5中所示,第二电极108堆叠于第一电极106的顶部上,并且因此,未示出第一电极106、第一膜层122以及第二膜层124。在它的组装形式中,第一电极106、第二电极108、第一电绝缘体层111和第二电绝缘体层112被夹持于第一膜层122与第二膜层124之间。第一膜层122在围绕第一电极106的外周边138和第二电极108的外周边160的区域处部分地密封至第二膜层124。在某些实施例中,第一膜层122被热密封至第二膜层124。具体地,在某些实施例中,第一膜层122被密封至第二膜层124以限定围绕第一电极106和第二电极108的密封部分190。第一膜层122和第二膜层124可以以任何合适的方式密封,比如使用粘合剂、热密封或等等。
45.第一电极106、第二电极108、第一电绝缘体层111和第二电绝缘体层112提供屏障,所述屏障防止第一膜层122密封至第二膜层124,从而形成未密封部分192。壳体110的未密封部分192包含其中设置有电极对104的电极区域194以及被电极区域194所围绕的可膨胀流体区域196。第一电极106和第二电极108的中心开口146、168形成可膨胀流体区域196并且被布置成轴向地堆叠于彼此上。尽管未示出,但是壳体110可以被切割以符合电极对104的几何形状以及减小人造肌肉101的大小,即,密封部分190的大小。
46.电介质流体198被提供于未密封部分192内并且在第一电极106与第二电极108之间自由地流动。当在本文中使用时,“电介质”流体为这样的介质或材料:该介质或材料在不传导的情况下传递电动力并且正因为这样具有低电导率。一些非限制性示例性电介质流体包含全氟烃类、变压器油以及去离子水。应当理解的是,可以使用针或其它合适的注射装置将电介质流体198注射至人造肌肉101的未密封部分192中。
47.现在参考图6和7,人造肌肉101可在非致动状态与致动状态之间致动。在非致动状态中,如图6中所示,第一电极106和第二电极108接近于其中心开口146、168和接片部分132、154的第一端134、156彼此部分地相间隔。由于壳体110在第一电极106的外周边138和第二电极108的外周边160处密封,所以接片部分132、154的第二端136、158相对于彼此保持于适当位置中。在图2a、2c以及3a中,附肢按摩装置10的一个或多个人造肌肉101中的至少一个处于非致动状态中。在致动状态中,如图7中所示,第一电极106和第二电极108彼此接触并且平行于彼此定向以将电介质流体198迫压至可膨胀流体区域196中。这致使电介质流体198流动通过第一电极106和第二电极108的中心开口146、168并且使可膨胀流体区域196膨大。在图2b、2c和3b中,附肢按摩装置10的一个或多个人造肌肉101中的至少一个处于致动状态中。
48.现在参考图6,示出处于非致动状态中的人造肌肉101。电极对104设置于壳体110的未密封部分192的电极区域194内。第一电极106的中心开口146和第二电极108的中心开口168在可膨胀流体区域196内同轴地对准。在非致动状态中,第一电极106和第二电极108彼此部分地相间隔并且彼此不平行。由于第一膜层122围绕电极对104密封至第二膜层124,所以接片部分132、154的第二端136、158彼此接触。因此,在第一电极106与第二电极108之间提供电介质流体198,从而使接片部分132、154的接近可膨胀流体区域196的第一端134、
156分离。换句话说,第一电极106的接片部分132的第一端134与第二电极108的接片部分154的第一端156之间的距离大于第一电极106的接片部分132的第二端136与第二电极108的接片部分154的第二端158之间的距离。这使电极对104在被致动时朝向可膨胀流体区域196进行拉链式连接。在某些实施例中,第一电极106和第二电极108可以为柔性的。因此,如图4中所示,第一电极106和第二电极108为凸形的,以使得其接片部分132、154的第二端136、158可以保持彼此靠近,但是接近中心开口146、168处彼此相间隔。在非致动状态中,可膨胀流体区域196具有第一高度h1。
49.当被致动时,如图7中所示,第一电极106和第二电极108从其接片部分132、154的第二端136、158朝向彼此拉链式连接,从而将电介质流体198推动至可膨胀流体区域196中。如图所示,当处于致动状态中时,第一电极106和第二电极108彼此平行。在致动状态中,电介质流体198流动至可膨胀流体区域196中以使可膨胀流体区域196膨大。这样,第一膜层122和第二膜层124沿相反的方向膨胀。在致动状态中,可膨胀流体区域196具有第二高度h2,所述第二高度h2大于可膨胀流体区域196在非致动状态中时的第一高度h1。尽管未示出,但是应当注意的是,电极对104可以被部分地致动至非致动状态与致动状态之间的位置。这将容许可膨胀流体区域196的部分膨大并且容许在必要时进行调整。
50.为了使第一电极106和第二电极108朝向彼此运动,通过电源(比如,图10的电源48)施加电压。在某些实施例中,可以从电源提供高达10kv的电压以穿过电介质流体198感应电场。第一电极106与第二电极108之间的所引起的吸引力将电介质流体198推动至可膨胀流体区域196中。来自可膨胀流体区域196内的电介质流体198的压力致使第一膜层122和第一电绝缘体层111沿着第一电极106的中心轴线c沿第一轴向方向变形并且致使第二膜层124和第二电绝缘体层112沿着第二电极108的中心轴线c沿相反的第二轴向方向变形。一旦停止对第一电极106和第二电极108供应电压,第一电极106和第二电极108就返回至它们的在非致动状态中的最初的非平行位置。
51.应当理解的是,本文中所公开的人造肌肉101、具体地带有互连的桥接部分174、176的接片部分132、154的本发明实施例对不包含接片部分132、154的致动器提供许多改进,比如e.acome,s.k.mitchell,t.g.morrissey,m.b.emmett,c.benjamin,m.king,m.radakovitz以及c.keplinger的标题为“具有肌肉般性能的液压放大自修复静电致动器(hydraulically amplified self
‑
healing electrostatic actuators with muscle
‑
like performance)”的论文(science 05jan 2018:vol.359,issue 6371,pp.61
‑
65)中所描述的液压放大自修复静电(hasel)致动器。与包含具有均匀的径向地延伸的宽度的甜甜圈形电极的已知的hasel致动器相比,分别在第一电极106和第二电极108中的每一个上包含两对接片部分132、154的人造肌肉101的实施例减小了人造肌肉101的整体质量和厚度,减小了在致动期间所需的电压量,并且减小了人造肌肉101的总体积,但却不减小在致动之后的合力的大小。更特别地,人造肌肉101的接片部分132、154提供拉链式连接的前部,与包含甜甜圈形电极的hasel致动器相比,所述拉链式连接的前部通过对人造肌肉101提供局部的且均匀的液压致动而增加致动功率。具体地,与甜甜圈形hasel致动器相比,一对接片部分132、154提供的每单位体积的致动器功率的量为甜甜圈形hasel致动器的两倍,而两对接片部分132、154提供的每单位体积的致动器功率的量为甜甜圈形hasel致动器的四倍。使接片部分132、154互连的桥接部分174、176还通过在致动期间维持相邻的接片部分132、154之
间的距离来限制接片部分132、154的屈曲。由于桥接部分174、176与接片部分132、154一体地形成,所以桥接部分174、176还通过消除提供增加的破裂风险的附接位置而防止接片部分132、154之间的泄漏。
52.在操作中,当人造肌肉101被致动时,可膨胀流体区域196的膨胀产生每立方厘米(cm3)致动器体积3牛顿
‑
毫米(n.mm)或更大的力,比如每立方厘米4n.mm或更大、每立方厘米5n.mm或更大、每立方厘米6n.mm或更大、每立方厘米7n.mm或更大、每立方厘米8n.mm或更大、或等等。在一个示例中,当通过9.5千伏(kv)的电压致动人造肌肉101时,人造肌肉101提供5n的合力。在另一个示例中,当通过10kv的电压致动人造肌肉101时,人造肌肉101在500克的负载下提供440%的应变。
53.而且,第一电极106和第二电极108的大小与电介质流体198的位移量成比例。因此,当期望可膨胀流体区域196内的较大的位移时,使电极对104的大小相对于可膨胀流体区域196的大小增加。应当理解的是,可膨胀流体区域196的大小由第一电极106和第二电极108中的中心开口146、168限定。因此,可以替代地或另外地通过增加或减小中心开口146、168的大小来控制可膨胀流体区域196内的位移程度。
54.如图8和9中所示,示出人造肌肉201的另一个实施例。人造肌肉201大致上类似于人造肌肉101。这样,相同的结构用相同的附图标记表示。然而,如图所示,第一电极106不包含中心开口。因此,仅仅第二电极108包含形成于其中的中心开口168。如图8所示,人造肌肉201处于非致动状态中,其中第一电极106为平坦的并且第二电极108相对于第一电极106为凸形的。在非致动状态中,可膨胀流体区域196具有第一高度h3。在致动状态中,如图9中所示,可膨胀流体区域196具有第二高度h4,所述第二高度h4大于第一高度h3。应当理解的是,与第一电极106和第二电极108两者均布置中心开口相反,通过仅仅在第二电极108中提供中心开口168,总变形可以形成于人造肌肉201的一侧上。另外,由于总变形形成于人造肌肉201的仅仅一侧上,所以当所有其它尺寸、取向以及电介质流体的体积相同时,人造肌肉201的可膨胀流体区域196的第二高度h4从垂直于人造肌肉201的中心轴线c的纵向轴线比人造肌肉101的可膨胀流体区域196的第二高度h2更远地延伸。应当理解的是,人造肌肉201的实施例可以与图1
‑
3b的附肢按摩装置10的一个或多个人造肌肉101一起使用或代替其使用。
55.现在参考图10,可以提供致动系统400,用于操作附肢按摩装置10、特别地用于操作附肢按摩装置10的一个或多个人造肌肉101。致动系统400可以包括控制器50、操作装置46、电源48、显示装置42、网络接口硬件44以及通信地联接这些构件的通信路径41,这些构件中的一些或全部可以设置于机载控制单元40中。
56.控制器50包括通信地联接至各种构件的处理器52和非暂时性电子存储器54。在某些实施例中,处理器52和非暂时性电子存储器54和/或其它构件包含于单个装置内。在其它实施例中,处理器52和非暂时性电子存储器54和/或其它构件可以分布于通信地联接的多个装置之间。控制器50包含存储一组机器可读指令的非暂时性电子存储器54。处理器52执行存储于非暂时性电子存储器54中的机器可读指令。非暂时性电子存储器54可以包括ram、rom、闪速存储器、硬盘驱动器、或能够存储机器可读指令的任何装置,以使得机器可读指令可以由处理器52访问。因此,本文中所描述的致动系统400可以以任何常规计算机编程语言被实施为预编程的硬件元件或者被实施为硬件和软件构件的组合。非暂时性电子存储器54可以被实施为一个存储器模块或多个存储器模块。
57.在某些实施例中,非暂时性电子存储器54包含用于执行致动系统400的功能的指令。例如,所述指令可以包含用于操作附肢按摩装置10的指令、用于分别地或共同地致动一个或多个人造肌肉101的指令,以及用于分别地或共同地致动人造肌肉叠层的指令。
58.处理器52可以为能够执行机器可读指令的任何装置。例如,处理器52可以为集成电路、微芯片、计算机或任何其它计算装置。非暂时性电子存储器54和处理器52联接至通信路径41,所述通信路径41在致动系统400的各个构件和/或模块之间提供信号互连性。因此,通信路径41可以使任何数量的处理器彼此通信地联接,并且容许联接至通信路径41的模块在分布式计算环境中运行。具体地,每个模块可以作为可以发送和/或接收数据的节点运行。当在本文中使用时,术语“通信地联接”意味着联接的构件能够彼此交换数据信号,例如,经由导电介质交换电信号,经由空气交换电磁信号,经由光波导交换光信号,以及等等。
59.如在图10中示意性地描绘的,通信路径41使控制器50的处理器52和非暂时性电子存储器54与致动系统400的多个其它构件通信地联接。例如,图10中所描绘的致动系统400包含与操作装置46和电源48通信地联接的处理器52和非暂时性电子存储器54。
60.操作装置46容许使用者控制附肢按摩装置10的人造肌肉101的操作。在某些实施例中,操作装置46可以为开关、触发器、按钮或任何控制器的组合以提供使用者操作。操作装置46联接至通信路径41,以使得通信路径41将操作装置46通信地联接至致动系统400的其它模块。操作装置46可以提供使用者界面,用于接收关于附肢按摩装置10的特定的操作构造的使用者指令,比如用于产生级联的、图案化的、随机的或均匀的节律。
61.电源48(例如,电池)为附肢按摩装置10的一个或多个人造肌肉101提供动力。在某些实施例中,电源48为可再充电的直流电源。应当理解的是,电源48可以为用于为附肢按摩装置10的一个或多个人造肌肉101提供动力的单个电源或电池。可以提供电源适配器(未示出)并且所述电源适配器经由线束或等等电联接,用以经由电源48为附肢按摩装置10的一个或多个人造肌肉101提供动力。
62.在某些实施例中,致动系统400还包含显示装置42。显示装置42联接至通信路径41,以使得通信路径41将显示装置42通信地联接至致动系统400的其它模块。显示装置42可以例如作为机载控制单元40的一部分位于附肢包裹物12上,并且可以响应于附肢按摩装置10的人造肌肉101的致动状态输出通知或者指示附肢按摩装置10的一个或多个人造肌肉101的致动状态的改变。而且,显示装置42可以为触摸屏,所述触摸屏除了提供光学信息外还检测显示装置42的表面上的或者与显示装置42相邻的表面上的触觉输入的存在和位置。因此,显示装置42可以包含操作装置46并且在显示装置42所提供的光学输出上直接地接收机械输入。
63.在某些实施例中,致动系统400包含用于经由网络60将致动系统400通信地联接至便携式装置70的网络接口硬件44。便携式装置70可以包含但不限于智能电话、平板电脑、个人媒体播放器、或包含无线通信功能的任何其它电气装置。应当理解的是,当提供便携式装置70时,便携式装置70可以用来为控制器50而不是操作装置46提供使用者命令。这样,使用者可能能够利用操作装置46的控制器来控制或设定用于控制附肢按摩装置10的人造肌肉101的程序。因此,可以经由借助网络60与控制器50无线地通信的便携式装置70远程地控制附肢按摩装置10的人造肌肉101。
64.现在应当理解的是,本文中所描述的实施例涉及这样的附肢按摩装置:该些附肢
按摩装置包含在附肢包裹物的内带与外层之间设置于附肢包裹物中的一个或多个人造肌肉。所述人造肌肉为可致动的以对所述内带选择性地施加压力,所述内带由弹性材料形成,以使得所述内带符合附肢的特定形状,并且对附肢按摩装置的一个或多个人造肌肉的致动对使用者的附肢施加选择性的且可定制的压力。
65.应当注意的是,在本文中可以使用术语“大致上”和“大约”来表示固有的不确定性程度,所述不确定性可以归因于任何定量比较、值、量度或其它表示。这些术语在本文中还被用来表示这样的程度:定量表示可以通过该程度与所陈述的参考不同,而不会导致所讨论的主题的基本功能发生改变。
66.尽管已经在本文中示例说明和描述了特定实施例,但是应当理解的是,在不脱离所要求保护的主题的范围的情况下,可以做出各种其它改变和修改。而且,尽管已经在本文中描述了所要求保护的主题的各个方面,但是这些方面不需要组合使用。因此,意图是所附权利要求涵盖在所要求保护的主题的范围内的所有这样的改变和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。